การประกอบตัวถังรถยนต์ของหุ่นยนต์สองล้อ แชสซีตีนตะขาบอเนกประสงค์สำหรับหุ่นยนต์ การติดตั้งและการเชื่อมต่อแพลตฟอร์มอิเล็กทรอนิกส์
เราคุ้นเคยกับอุปกรณ์ 105-Bender ZiChip เรียนรู้วิธีทำงานกับโปรแกรม Tuner และสร้างสคริปต์ง่ายๆ หลายสคริปต์ เพื่อดำเนินการต่อและแสดงให้เห็นว่าเฟิร์มแวร์ 105-Bender ทำงานอย่างไรกับมอเตอร์ เราจำเป็นต้องมีรถเข็น
ฉันใช้อุปกรณ์ของตัวเองเพื่อแก้ไขข้อบกพร่อง แต่สำหรับคุณผู้อ่านบล็อกนี่ไม่ใช่ตัวเลือกที่เหมาะสมมาก ดังนั้นจึงตัดสินใจใช้รถเข็นสำเร็จรูปสำหรับโครงการ Arduino เพื่อสาธิตอุปกรณ์
ร้านค้ามอบรถเข็นและโมดูลสำหรับโปรเจ็กต์นี้ให้ฉัน ดีย์แล็บ . ในร้านนี้คุณสามารถซื้อสิ่งที่น่าสนใจอื่น ๆ อีกมากมาย
ชุดรถเข็นมีดังนี้
ดังที่คุณเข้าใจแล้วรูปลักษณ์ของรถเข็นนั้นไม่สำคัญ คุณสามารถใช้การออกแบบที่แตกต่างไปจากเดิมอย่างสิ้นเชิง นี่อาจเป็นรถเข็นขับเคลื่อน 4 ล้อหรือแม้แต่รถเข็นตีนตะขาบ
นอกจากรถเข็นแล้ว เรายังต้องการ:

- บอร์ด Arduino (Uno หรือ Nano)
— ไดรเวอร์มอเตอร์ L298N (หรือประเภทอื่น)
— เครื่องตรวจจับแสงและรีโมทคอนโทรล IR (คุณสามารถใช้รีโมทคอนโทรลในครัวเรือนและ TSOP4836)
- ตัวส่งสัญญาณพีโซหรือลำโพงขนาดเล็ก
- ไดโอดเปล่งแสง
— เขียงหั่นขนมและสายเชื่อมต่อ (เพื่อความสะดวกในการติดตั้ง)
การประกอบรถเข็นและการเชื่อมต่อโมดูลเข้าด้วยกันไม่ควรทำให้เกิดปัญหาใดๆ ต้องเชื่อมต่อโมดูลตามแผนภาพ

ใช้เขียงหั่นขนมเพื่อเชื่อมต่อหรือเชื่อมต่อทุกอย่างด้วยสายไฟในคราวเดียว - เหมือนที่ฉันเคยทำ เค้าโครงของโมดูลขึ้นอยู่กับคุณเท่านั้น - ทำในสิ่งที่สะดวกที่สุดสำหรับคุณ



ไฟ LED 3 วัตต์พร้อมคอลลิเมเตอร์ดั้งเดิมถูกใช้เป็นไฟหน้า เมื่อใช้ไฟ LED สองตัวที่เชื่อมต่อแบบอนุกรม ไม่จำเป็นต้องใช้ไดรเวอร์ - เมื่อจ่ายไฟ 6 โวลต์ กระแสจะไม่เกินค่าที่ระบุ สามารถใช้ไฟ LED วัตต์เดียวได้ ทรานซิสเตอร์ภาคสนามถูกใช้เป็นกุญแจสำคัญสำหรับไฟ LED กำลังสูง ลำโพงต้องเชื่อมต่อผ่านตัวเก็บประจุ 10 - 100 µF
รถเข็นประกอบแล้ว ในบทความถัดไป เราจะเปิดตัวและสอนวิธีปฏิบัติตามคำสั่งจากรีโมทคอนโทรล
(เข้าชม 4,275 ครั้ง, 1 ครั้งในวันนี้)
แพลตฟอร์มที่ตรงตามข้อกำหนดหลายประการ: การเคลื่อนย้ายอย่างอิสระ ความสามารถในการติดตั้งอุปกรณ์เพิ่มเติมและขยายขีดความสามารถ รวมถึงต้นทุนที่สมเหตุสมผล นี่คือแพลตฟอร์มหุ่นยนต์หรือเรียกง่ายๆ ว่าแชสซีแบบติดตามที่ฉันจะสร้าง โดยปกติแล้ว ฉันกำลังโพสต์คำแนะนำเพื่อการพิจารณาของคุณ
เราจะต้อง:
Tamiya 70168 กล่องเกียร์คู่ (สามารถเปลี่ยนเป็น 70097 ได้)
- ชุดลูกกลิ้งและราง Tamiya 70100
- แพลตฟอร์ม Tamiya 70157 สำหรับติดตั้งกระปุกเกียร์ (สามารถเปลี่ยนเป็นแผ่นไม้อัดขนาด 4 มม.)
- แผ่นสังกะสีชิ้นเล็กๆ
- ไม้อัด 10 มม. (ชิ้นเล็ก)
- อาร์ดูโน่ นาโน
- ดร.วี.8833
- LM 317 (ตัวปรับแรงดันไฟฟ้า)
- ไฟ LED 2 ดวง (แดงและเขียว)
- ตัวต้านทาน 240 โอห์ม 2x 150 โอห์ม 1.1 กิโลโอห์ม
- คาปาซิเตอร์ 10v 1000uF
- หวีแถวเดี่ยว 2 อัน PLS-40
- ขั้วต่อ PBS-20 จำนวน 2 ตัว
- อินดัคเตอร์ 68uH
- แบตเตอรี่ NI-Mn 6 ก้อน 1.2v 1000mA
- ขั้วต่อสองพินตัวผู้-ตัวเมียต่อสาย
- สายไฟที่มีสีต่างกัน
- ประสาน
- โรซิน
- หัวแร้ง
- โบลท์ 3x40, 3x20, น็อต และแหวนรองสำหรับพวกมัน
- โบลท์ 5x20 น็อต และน็อตเสริมสำหรับพวกมัน
- เจาะ
- สว่านโลหะ 3 มม. และ 6 มม
ขั้นตอนที่ 1: ตัดโลหะ
ขั้นแรกเราต้องตัดสี่ส่วนออกจากแผ่นโลหะ (ควรชุบสังกะสี) สองส่วนต่อแทร็ก เมื่อใช้รูปแบบนี้ เราตัดออกเป็นสองส่วน:
จุดต่างๆ ระบุตำแหน่งที่ต้องเจาะรู และระบุเส้นผ่านศูนย์กลางของรูข้างๆ จำเป็นต้องมีรูขนาด 3 มม. สำหรับแขวนด้วยลูกกลิ้งและ 6 มม. สำหรับร้อยลวดผ่านรูเหล่านั้น หลังจากตัดและเจาะคุณจะต้องใช้ไฟล์ผ่านขอบทั้งหมดโดยไม่ทิ้งมุมที่แหลมคม งอ 90 องศาตามเส้นประ ระวัง! เรางอส่วนแรกไปในทิศทางใดก็ได้และงอส่วนที่สองไปในทิศทางตรงกันข้าม พวกเขาควรจะโค้งงออย่างสมมาตร มีความแตกต่างอีกอย่างหนึ่ง: จำเป็นต้องเจาะรูสำหรับสกรูที่ยึดแผ่นของเราเข้ากับฐาน ควรทำเมื่อฐานพร้อม เราวางชิ้นงานบนฐานและทำเครื่องหมายตำแหน่งการเจาะเพื่อให้สกรูตกลงไปตรงกลางของแผ่นไม้อัด เราสร้างรายละเอียดเพิ่มเติมอีกสองประการตามการพัฒนาครั้งที่สอง:





ขั้นตอนที่ 2 เตรียมฐาน
เราประกอบกระปุกเกียร์ตามคำแนะนำที่ให้มา เราขันมันเข้ากับแพลตฟอร์ม หากไม่มีแท่น ให้ตัดไม้อัดสี่เหลี่ยมขนาด 4 มม. 53x80 มม. ออกแล้วติดกระปุกเกียร์เข้ากับแท่น เราใช้ไม้อัดขนาด 10 มม. ตัดสี่เหลี่ยมสองอันขนาด 90x53 มม. และ 40x53 มม. ภายในสี่เหลี่ยมผืนผ้าเล็กเราตัดสี่เหลี่ยมอีกอันออกเพื่อให้ได้กรอบที่มีความหนาของผนัง 8 มม.

เราบิดทุกอย่างตามที่แสดงในภาพ:




เราเจาะรูขนาด 6 มม. ที่มุมของแท่น แล้วสอดสลักเกลียวขนาด 5x20 ของเราเข้าไปแล้วขันน็อตเสริมที่ด้านบน จำเป็นสำหรับการยึดกลไกหรือบอร์ดต่างๆ ในภายหลัง เพื่อความสะดวกเราจะติดไฟ LED ทันที:


ขั้นตอนที่ 3 ช่างไฟฟ้า
สำหรับการควบคุมเราจะใช้ Arduino Nano ตัวขับมอเตอร์ DVR 883 เราประกอบทุกอย่างบนแผงวงจรตามแผนภาพ

L1 - จำเป็นต้องใช้ตัวเหนี่ยวนำและ C1 เพื่อรักษาเสถียรภาพแรงดันไฟฟ้า Arduino ตัวต้านทาน R1 และ R2 ที่ด้านหน้ามอเตอร์เป็นตัวจำกัดกระแส ต้องเลือกค่าของตัวต้านทานเหล่านี้สำหรับมอเตอร์เฉพาะ มันทำงานได้ดีสำหรับฉันที่ 3 โอห์ม จำเป็นต้องใช้ LM317 เพื่อชาร์จแบตเตอรี่ อินพุตสามารถจ่ายแรงดันไฟฟ้าได้ตั้งแต่ 9.5 V ถึง 25 V R3 – 1.1 kOhm R4 – 240 Ohm “หมุด” ทางด้านซ้ายใช้สำหรับการเชื่อมต่ออุปกรณ์ประเภทต่างๆ ในภายหลัง (บลูทูธ, โมดูลการสื่อสาร 433 MHz, IR, เซอร์โว ฯลฯ) สำหรับแหล่งจ่ายไฟ เราจะใช้แบตเตอรี่ Ni-Mn 1.2v 1000mA จำนวน 6 ก้อน บัดกรีแบบอนุกรมและพันด้วยเทปพันสายไฟ

ขั้นตอนที่ 4: ประกอบฐาน
เราใช้ฐานของเราแล้วติดบอร์ดไว้โดยใช้เทปสองหน้า ชิ้นส่วนโลหะตามการพัฒนาครั้งแรกจะต้องขันด้วยสกรูเกลียวปล่อยขนาดเล็กที่ฐานด้านข้าง โดยให้ชิ้นส่วนงอออกไปด้านนอก ระวังสกรูเพื่อให้รูด้านนอกสุดขนาด 6 มม. พอดีกับแกนเอาท์พุตของกระปุกเกียร์ ด้านล่างของชิ้นส่วนจะต้องขนานกับฐานและสมมาตรสัมพันธ์กับส่วนที่สองที่คล้ายกัน ผลลัพธ์ควรเป็น:




เพื่อให้ผลิตภัณฑ์โฮมเมดของเรามีรูปลักษณ์ที่สวยงาม เราจะเพิ่มรายละเอียดอีกสองสามอย่าง มันไม่ได้บังคับ เราตัดสี่เหลี่ยมขนาด 110x55 มม. ออกจากพลาสติกสีขาวแล้วงอตามที่แสดงในภาพ หางก็เป็นทางเลือกเช่นกัน แต่ฉันชอบรูปลักษณ์และความเย็นเมื่อเคลื่อนไหว:


ฝาครอบนี้คลุมกระปุกเกียร์เพื่อไม่ให้สิ่งสกปรกเข้าไปและทำให้เสียงรบกวนน้อยลง ต่อไปเรายังตัดสี่เหลี่ยมขนาด 52x41 มม. ออกจากพลาสติกสีขาว เราสร้างรูสำหรับเชื่อมต่อ Arduino และปุ่มปิดเครื่องดังในภาพ:

เราติดมันทั้งหมดด้วยเทปสองหน้า:

สติ๊กเกอร์ความงาม

ทั้งสองส่วนนี้สามารถทำจากวัสดุเกือบทุกชนิดที่คุณมีอยู่ ซึ่งอาจเป็นกระดาษแข็งหนา (ซึ่งสามารถทาสีได้) แผ่นใยไม้อัดไม้อัดบางหรือแผ่นพลาสติกสีใดก็ได้ อย่าลืมเกี่ยวกับแบตเตอรี่ กาวด้วยเทปสองหน้าบนส่วนโลหะด้านขวาของฐาน:

ขั้นตอนที่ 5 ของหนอนผีเสื้อ
ที่นี่เราจะต้องมีช่องว่างสำหรับการสแกนครั้งที่สอง เราใส่สลักเกลียวที่มีหัวกึ่งทรงกระบอก 3x20 เข้าไปในรูขนาด 3 มม. เราใส่แหวนรองและขันน็อตให้แน่น

วันนี้ฉันเริ่มเผยแพร่บทความเกี่ยวกับการสร้างหุ่นยนต์เคลื่อนที่ของตัวเองโดยเฉพาะ ที่สภาครอบครัว มีการตัดสินใจว่าจะตั้งชื่อให้เขาว่า Robotosh ซึ่งเป็นเหตุผลว่าทำไมฉันจึงตั้งชื่อบล็อกของฉันแบบนั้น จุดประสงค์ของการสร้างคือเพื่อศึกษาอัลกอริธึมและองค์ประกอบต่าง ๆ ของระบบหุ่นยนต์ในทางปฏิบัติ
ในขณะนี้ หุ่นยนต์ของฉันเป็นแพลตฟอร์มแบบสี่ล้อที่มีบอร์ดไมโครคอนโทรลเลอร์ติดตั้งอยู่บนนั้น และแขวนไว้พร้อมกับเซ็นเซอร์และอินเทอร์เฟซจำนวนหนึ่งสำหรับการโต้ตอบกับผู้ใช้ ซอฟต์แวร์ยังอยู่ในช่วงเริ่มต้น ดังนั้นฉันจะวิเคราะห์รายละเอียดว่าทำไมและทำไมจึงมีการใช้งานในลักษณะนี้ในขณะนี้ และค่อยๆ ก้าวต่อไป เพิ่มฟังก์ชันการทำงานและมอบ "ความฉลาด" นี่คือหุ่นยนต์ตัวแรกของฉัน ดังนั้นบางทีการสร้างมันขึ้นมาบางขั้นตอนอาจมีข้อผิดพลาดหรือทางตัน
ความคิด
ในการประมาณครั้งแรก แนวคิดนี้มีลักษณะดังนี้: หุ่นยนต์อัตโนมัติที่มีคุณสมบัติดังต่อไปนี้:
- แพลตฟอร์ม 4 ล้อ
- ใช้ในร่ม (อพาร์ตเมนต์)
- วิธีการแบบไม่สัมผัสเพื่อระบุอุปสรรคเพื่อหลีกเลี่ยงการชน
- โหมดการควบคุม:
- โหมด "เดินสุ่ม" ออฟไลน์เพื่อสร้างแผนที่ห้อง
- โหมดการควบคุมระยะไกล
- โหมดการดำเนินการคำสั่งเสียงพร้อมการจดจำเสียง
- การตรวจสอบการชาร์จแบตเตอรี่และการชาร์จด้วยตนเอง
- การแสดงข้อมูลบนจอ LCD ตัวอักษร
- เสียงปลุก
โครงหุ่นยนต์
ในฐานะแชสซี ฉันตัดสินใจใช้แพลตฟอร์มสี่ล้อที่ซื้อมาด้วยเหตุผลทางเศรษฐกิจล้วนๆ (ไม่ว่าฉันจะคิดยังไง อะไหล่ก็แพงกว่า แต่นี่เป็นหนึ่งในราคาถูกที่สุดที่ฉันสามารถหาได้) ตัวเลือกของฉันตกอยู่ที่แชสซีชุดแชสซี DAGU 4WD ซึ่งเป็นแพลตฟอร์ม 4 ล้อพร้อมมอเตอร์ หน้าตาแพ็คเกจเป็นแบบนี้ครับ

แพลตฟอร์มสำหรับการติดตั้งอุปกรณ์เสริมต่างๆ ทำจากกระจกอะคริลิคสีแดงซึ่งมีรูสำหรับติดตั้งจำนวนมากสำหรับติดตั้งเซ็นเซอร์ ตัวควบคุม และเซอร์โวมอเตอร์ ต้องบอกว่าแก้วอะคริลิกเจาะได้ง่ายมากดังนั้นแม้ว่าในอนาคตจะมีบางสิ่งที่ไม่ตกหลุมที่ทำเสร็จแล้ว แต่คุณก็สามารถสร้างเพิ่มเติมได้อย่างง่ายดาย ล้อเป็นแบบยาง มอเตอร์สับเปลี่ยนพร้อมกระปุกเกียร์พลาสติก
บอร์ด
ขนาด: 175 x 109 x 3 มม
ระยะห่างระหว่างบอร์ด (ความสูงของชั้นวางรวม): 24 มม
ระยะห่างจากพื้น: 45 มม
ล้อ
เส้นผ่านศูนย์กลางล้อ : 67 มม
ความกว้างขอบ: 26 มม
มอเตอร์
แรงดันไฟฟ้า: 4.5 - 7.2 โวลต์
ความเร็วรอบเดินเบา: 90 ± 10 รอบต่อนาที
กระแสไฟขณะไม่มีโหลด: 190 mA (สูงสุด 250 mA)
แรงบิด : 0.8 กก. ซม
กระแสสูงสุด: 1A
ใช้เวลาประมาณยี่สิบนาทีในการประกอบ แชสซีที่ประกอบแล้วมีลักษณะดังนี้:



พูดตามตรง ฉันโดนซุ่มโจมตีเครื่องยนต์ มอเตอร์เหล่านี้ไม่ได้ออกแบบมาเพื่อรองรับตัวเข้ารหัส ซึ่งเป็นสิ่งสำคัญสำหรับฉัน เนื่องจากฉันวางแผนที่จะใช้ตัวเข้ารหัสเพื่อให้ข้อเสนอแนะเพื่อการวางตำแหน่งที่แม่นยำยิ่งขึ้น ดังนั้นเป็นไปได้มากว่าหากไม่สามารถสร้างเครื่องยนต์เหล่านี้ใหม่ได้ ฉันจะเปลี่ยนเครื่องยนต์เป็นรุ่นอื่นในอนาคต
โดยรวมแล้วแท่นประกอบก็ดูค่อนข้างดี ถ้าไม่ใช่เพราะปัญหากับตัวเข้ารหัส ฉันก็พอใจ 100%
คุณให้คะแนนสิ่งพิมพ์นี้อย่างไร?
แรงดันไฟฟ้าที่กำหนดของเซลล์ลิเธียมไอออน 18650 หนึ่งเซลล์คือ 3.6-3.7 V เซลล์ที่ชาร์จเต็มแล้วจะสร้าง 4.1-4.2 V แต่ด้วยแรงดันไฟฟ้าขั้นต่ำมันจะยากกว่า - แรงดันคายประจุสุดท้ายขึ้นอยู่กับประเภทของแบตเตอรี่และตัวเลขนี้สามารถ ผันผวนภายใน 2.6-3.2 V คุณสามารถคายประจุได้ต่ำลง แต่นี่เป็นวิธีที่แน่นอนในการทำให้แบตเตอรี่เสื่อมสภาพอย่างรวดเร็ว ฉันตัดสินใจที่จะประมาณการแรงดันไฟฟ้าที่เกิดจากแบตเตอรี่ให้คร่าวๆ ด้วยช่วงค่าที่กำหนด-สูงสุด จากนั้นปรากฎว่าชุดแบตเตอรี่ซีรีส์สอง, สามและสี่ชุดให้ช่วง 7.2-8.4 V, 10.8-12.6 V, 14.4-16.8 V จากชุดประกอบดังกล่าวเราจำเป็นต้องได้รับแรงดันไฟฟ้าสองตัว - แรงดันไฟฟ้าบางส่วนเพื่อจ่ายไฟให้กับ มอเตอร์และ 5 V เพื่อจ่ายไฟให้กับอุปกรณ์อิเล็กทรอนิกส์ การประกอบแบตเตอรี่สองก้อนสามารถจ่ายไฟให้กับมอเตอร์ที่ 6 V โดยใช้ตัวแปลง DC/DC แบบสเต็ปดาวน์ แต่ความแตกต่างระหว่างค่าแรงดันไฟฟ้าขั้นต่ำ (เมื่อแบตเตอรี่หมดประจุจนถึงค่าที่กำหนดจะเป็น 7.2 V) และ 6 V จะเป็น ประมาณ 1.2 V ซึ่งไม่เพียงพอสำหรับการทำงานที่เสถียรของตัวแปลง DC/DC แบบสเต็ปดาวน์ - เพื่อหลีกเลี่ยงปัญหา จำเป็นต้องมีความแตกต่างของแรงดันไฟฟ้าระหว่างอินพุตและเอาต์พุตอย่างน้อย 2 V (ในความเป็นจริงอาจ น้อยลงสำหรับตัวแปลงที่ออกกลางคันต่ำ แต่เราจะไม่เน้นไปที่พวกมัน) การประกอบองค์ประกอบทั้งสามนั้นค่อนข้างเหมาะสำหรับเรา เราจะได้แรงดันไฟฟ้าที่จำเป็นโดยใช้ตัวแปลง DC/DC แบบสเต็ปดาวน์ มอเตอร์สามารถจ่ายไฟได้ที่ 9 V ในกรณีที่แย่ที่สุดเราจะได้ค่าความแตกต่าง 1.8 V ซึ่งน่าจะเพียงพอแล้ว การประกอบองค์ประกอบทั้งสี่ก็เหมาะสมเช่นกัน แต่คุณต้องเข้าใจว่าแบตเตอรี่เพิ่มเติมหมายถึงน้ำหนักที่เพิ่มขึ้นและใช้พื้นที่แม้ว่าจะมีการใช้พลังงานที่สูงกว่าสำหรับแบตเตอรี่ทั้งหมดก็ตาม
วิธีที่สองในการจัดการแหล่งจ่ายไฟคือการใช้การเชื่อมต่อแบบขนานของแบตเตอรี่ก้อนเดียวกันและตัวแปลงบูสต์ DC/DC จากนั้นจาก 3.6-4.2 V แรงดันไฟฟ้าสามารถเพิ่มเป็น 5 V สำหรับอุปกรณ์อิเล็กทรอนิกส์และเป็น 6-9 V สำหรับมอเตอร์ ดูเหมือนว่าความจุของชุดแบตเตอรี่ดังกล่าวสามารถเปลี่ยนแปลงได้ง่ายโดยการเพิ่มเซลล์ใหม่ แต่อย่าลืมว่าแบตเตอรี่ที่ใช้จะต้องมีความจุและความต้านทานภายในใกล้เคียงกัน
มีบอร์ดควบคุมพิเศษสำหรับการชาร์จ/คายประจุซีรีส์หรือแบตเตอรี่แบบขนาน ตัวควบคุมการป้องกันจะปกป้องชุดแบตเตอรี่จากการประจุหรือการคายประจุที่มากเกินไป (การควบคุมแรงดันไฟฟ้า) การลัดวงจร และกระแสไฟฟ้าเกินที่อนุญาต เมื่อใช้บอร์ดธรรมดา จำเป็นต้องใช้แหล่งจ่ายไฟภายนอกที่มีข้อจำกัดกระแสไฟชาร์จ ตัวควบคุมการชาร์จ/คายประจุสามารถชาร์จแบตเตอรี่ได้อย่างอิสระโดยใช้วิธี cc/cv โดยมีกระแสไฟชาร์จจำกัด ตัวควบคุมขั้นสูงสำหรับการเชื่อมต่อแบบอนุกรมของแบตเตอรี่ยังสามารถจ่ายประจุแยกกันสำหรับแบตเตอรี่แต่ละก้อนได้ โดยจะปรับสมดุลเซลล์แบตเตอรี่
ฉันเลือกรูปแบบการเชื่อมต่อแบตเตอรี่แบบอนุกรมโดยใช้แผงป้องกันและอุปกรณ์ชาร์จภายนอก ในอนาคตสามารถเปลี่ยนบอร์ดควบคุมธรรมดาดังกล่าวเป็นตัวควบคุมการชาร์จที่มีการปรับสมดุลได้ แม้ว่าเมื่อใช้การเชื่อมต่อแบบขนานนั้นไม่จำเป็นต้องมีการทรงตัว แต่ก็ต้องคำนึงว่าหากแบตเตอรี่ก้อนหนึ่งหมดสภาพอย่างรุนแรงตัวควบคุมจะไม่สามารถตรวจจับสิ่งนี้ได้และอาจเต็มไปด้วยบางสิ่ง นอกจากนี้ยังควรพิจารณาถึงความจริงที่ว่าโหมดการทำงานของแบตเตอรี่แต่ละก้อนจะแตกต่างกัน ตัวอย่างเช่น เมื่อใช้พลังงานเท่ากัน แบตเตอรี่ที่มีการเชื่อมต่อแบบขนานจะต้องจ่ายกระแสไฟมากกว่าการเชื่อมต่อแบบขนาน
ดังนั้นมอเตอร์ที่มีแรงดันไฟฟ้าระบุ 6 V และช่วงการทำงาน 3-9 V จึงเหมาะสม ฉันเลือกมอเตอร์ที่มีความเร็ว 281 รอบต่อนาทีและการสิ้นเปลืองพลังงานที่ไม่ได้ใช้งาน 80 mA ภายใต้ภาระ ความเร็วจะลดลงเหลือ 238 รอบต่อนาที กระแสไฟฟ้าเพิ่มขึ้นเป็น 380 mA ในขณะที่เครื่องยนต์ผลิตกำลัง 2 วัตต์ และพัฒนาแรงบิด 0.5 กก.*ซม. เมื่อมอเตอร์หยุดทำงาน แรงบิดจะเพิ่มขึ้นเป็น 4 กก.*ซม. และกระแสไฟฟ้าเป็น 900 mA ลักษณะทั้งหมดนี้นำมาจากแผ่นป้ายที่โพสต์บนเว็บไซต์ของผู้ขายผลิตภัณฑ์รายหนึ่ง เนื่องจากฉันไม่พบ "เอกสารข้อมูล" ปกติ
การประกอบตัวเรือนและแชสซี
ฉันสั่งเครื่องยนต์ดังต่อไปนี้
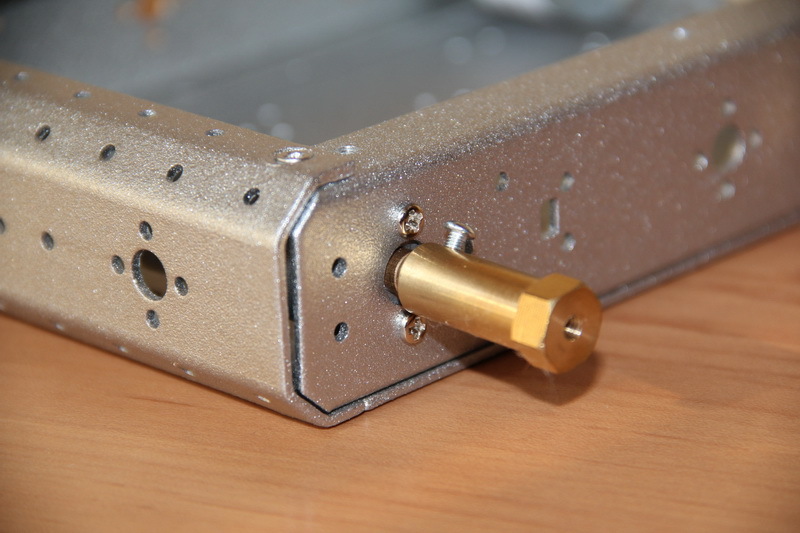
หากดูจากภาพ คุณจะเห็นร่องบนเพลาที่ยื่นออกมาจากเครื่องยนต์ พบชุดข้อต่อและล้อสำหรับเครื่องยนต์เหล่านี้

ล้อที่มีเส้นผ่านศูนย์กลาง 80 มม. ยางแบบมีสตั๊ดแบบนุ่ม


ฉันจะสร้างฐานจากมุมอะลูมิเนียมกว้างๆ (หรืออะไรที่คล้ายกันที่หาซื้อได้ตามร้านฮาร์ดแวร์) โดยฉันจะสร้างกรอบ "ด้านข้าง" ซึ่งจะปิดด้วยแผ่นโลหะน้ำหนักเบาและทนทาน มีการเจาะรูในตำแหน่งที่ถูกต้องและตัดด้ายตามความจำเป็น อย่างไรก็ตาม ก่อนอื่น ฉันตัดสินใจที่จะมองหาสิ่งที่อุตสาหกรรมของจีนนำเสนอ และฉันพบชุดอุปกรณ์ - ชุดแชสซีสำหรับสร้างหุ่นยนต์ซึ่งประกอบด้วยตัวถัง มอเตอร์ ข้อต่อและล้อตามที่กล่าวมาข้างต้น รวมถึงช่องใส่แบตเตอรี่สำหรับแบตเตอรี่ AA สวิตช์ไฟ ปลั๊กไฟ และตัวยึด ตัวถังมีหลายรูซึ่งทำให้เบาขึ้นตามเหตุผลและการมีอยู่ของพวกมันควรลดปริมาณงานประปาให้เหลือน้อยที่สุด


เมื่อประมาณขนาดและปริมาตรของพื้นที่ภายใน (ในเวลาเดียวกันได้เลือกอุปกรณ์อิเล็กทรอนิกส์สำหรับแพลตฟอร์มซึ่งควรจะพอดีกับในกรณีนี้) ฉันจึงสั่งชุดอุปกรณ์นี้ สำหรับเครื่องยนต์ที่มาถึง ดังที่คุณเห็นด้านบน ด้วยเหตุผลบางอย่าง มันบอกว่า JGA25-370-9v-281rpm ฉันไม่เข้าใจว่าทำไม 9v อย่างแน่นอนในเมื่อค่าเล็กน้อยของกลุ่มย่อยนี้คือ 6 V แต่คนจีนอาจรู้ดีกว่าว่าจะเขียนอะไรเพื่อขายได้ดีขึ้น
ตัวเคสมีน้ำหนักเกือบ 400 กรัม เป็นการยากที่จะตอบว่าทำจากวัสดุอะไร แต่ดูไม่เหมือนอะลูมิเนียมบริสุทธิ์




ถอดฝาครอบออกและติดตั้งเครื่องยนต์ รูสำหรับมอเตอร์มีเส้นผ่านศูนย์กลางสำหรับสกรู M3 เท่านั้นไม่มีระยะขอบเหลือสำหรับการปรับตำแหน่ง แต่พูดตามตรงแล้วสิ่งนี้ไม่ได้ทำให้เกิดปัญหาใด ๆ - รูนั้นตรงกับเกลียวบนตัวเรือนมอเตอร์อย่างชัดเจน



เราติดตั้งข้อต่อ

และยึดล้อ


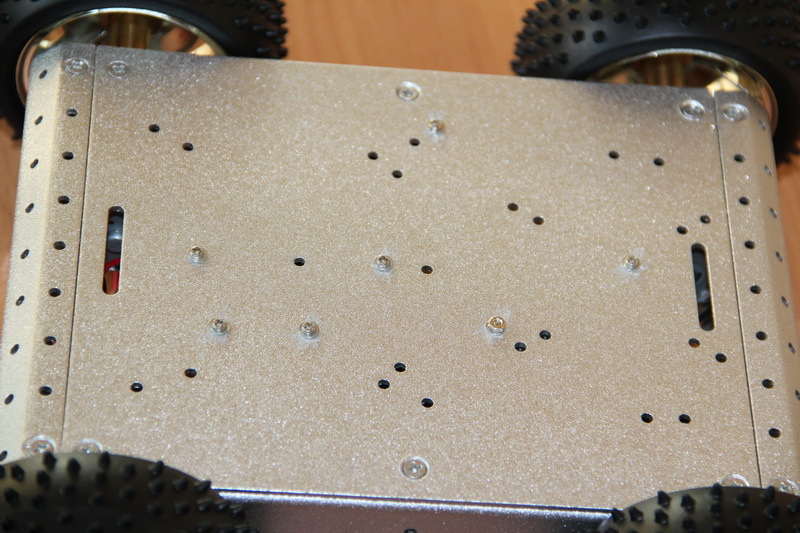
ผลลัพธ์ที่ได้คือแท่นสำเร็จรูปที่มีระยะห่างจากพื้นประมาณ 23 มม.

น้ำหนักของแชสซี "ไม่ได้ใช้งาน" มากกว่าหนึ่งกิโลกรัม จำภาพที่มีการวัดมวลของแต่ละชิ้นส่วนได้ไหม? 393+(58+85+20)*4 = 1,045 กรัม น้ำหนักรวมทั้งหมด 1,057 กรัม 12 กรัม เพิ่มน๊อต 16 ตัว

นี่คือสิ่งที่เกิดขึ้น ค่อนข้างเป็นแพลตฟอร์มที่ดี

แผนภาพไฟฟ้า
สมควรอธิบายประเด็นสำคัญว่าทำไมวาฬตัวนี้ถึงเป็นเช่นนั้น ความจริงก็คือถ้าเราสร้างเคสด้วยตัวเองก็สามารถกำหนดปริมาตรภายในได้ตามอำเภอใจ เคสที่ซื้อมาทำให้เรามีปริมาตรคงที่อย่างเคร่งครัดซึ่งทุกอย่างต้องใส่ได้พอดี ตามหลักการแล้วจะมีเงินสำรองเหลืออยู่ด้วย สิ่งนี้จะต้องนำมาพิจารณาในเบื้องต้นและทำความเข้าใจ: การเติมที่จำเป็นจะพอดีกับกรณีนี้หรือไม่ และจำเป็นต้องเปลี่ยนอุปกรณ์อิเล็กทรอนิกส์หรือเลือกกรณีอื่น ภายในเคสจะถูกติดตั้ง: มอเตอร์, แบตเตอรี่, ไดรเวอร์สำหรับมอเตอร์, แผงจ่ายไฟซึ่งจะมีอุปกรณ์อิเล็กทรอนิกส์บางประเภทอยู่ด้วย - ตัวแปลงแรงดันไฟฟ้าแบบเดียวกันดูเหมือนจะชัดเจนว่าเราจะมีอะไรอยู่ข้างใน แต่ทุกอย่างจะเชื่อมโยงกันอย่างไร? หากคุณมีไอเดียแต่สร้างภาพออกมาไม่ได้ แสดงว่าคุณไม่มีไอเดีย ในอุปกรณ์อิเล็กทรอนิกส์ปรากฎว่าควรมีสองภาพ - ภาพหนึ่งซึ่งเราจินตนาการไว้อย่างสมบูรณ์แล้วและภาพไฟฟ้า (อันที่จริงก็มีภาพอัลกอริธึมด้วย - เมื่อมีการอธิบายพฤติกรรมของอุปกรณ์โดยพิจารณาจากมัน ความสามารถของฮาร์ดแวร์และ/หรือซอฟต์แวร์ (ฟังก์ชันการทำงานของเฟิร์มแวร์)
ฉันใช้เวลาเดินทางไปทำงานค่อนข้างมาก โดยทั่วไปแล้ว หากใช้แนวทางที่ถูกต้อง การเดินทางระยะไกลจะกลายเป็นข้อดีได้ด้วยการอ่านหนังสือ ดู/ฟังโปรแกรมวิทยาศาสตร์ยอดนิยม หรือหนังสือเสียงที่คุณไม่เคยอ่าน ฟัง หรือดูมาก่อน ต้องขอบคุณเงื่อนไขเหล่านี้ที่ทำให้ฉันเป็นแฟนและรับฟังเรื่องราวทั้งหมดของ Model for Assembly (เพื่อไม่ให้มีคำถามในความคิดเห็น -) การผิดประเวณีด้วยหุ่นยนต์ก็ไม่มีข้อยกเว้น และฉันก็คิดและวาดแผนผังของแพลตฟอร์มบนท้องถนน
ไดอะแกรมถูกวาดใน OneNote รูปภาพสามารถคลิกได้ ใช่ ฉันรู้สึกละอายใจ - แผนภาพวงจรดูไม่มีหลักการ ในช่วงสามสัปดาห์ที่ผ่านมา ฉันไม่สามารถอุทิศเวลาเพื่อขัดเกลาบทความได้ และคำถามก็เกิดขึ้นแล้ว: ฉันควรเผยแพร่สิ่งใดเลยหรือเลื่อน "ไว้ใช้ทีหลัง" ฉันตัดสินใจเผยแพร่ด้วยวิธีนี้ ไม่เช่นนั้น "ไว้ใช้ทีหลัง" อาจเต็มไปด้วยปัญหา ฉันจะวาดไดอะแกรมปกติและแทนที่รูปภาพ ในทางกลับกัน การออกแบบนี้ดูเหมือน DIY ดั้งเดิม ที่ทำงานหรือที่บ้าน เมื่อมีไอเดียเกิดขึ้น ขั้นแรกให้หยิบกระดาษธรรมดาและดินสอธรรมดา...
เรามาดูแผนผังว่าเราจะเชื่อมต่อกับอะไรและทำอะไร แบตเตอรี่ 18650 สามก้อนเชื่อมต่อกับตัวควบคุมแบตเตอรี่ลิเธียมไอออน D1 วงจรทั้งหมดมี "กราวด์ร่วม" ซึ่งเชื่อมต่อเอาต์พุตของตัวควบคุม P-D1 เอาต์พุต P+ ผ่านฟิวส์ FU1 และสวิตช์ SW เชื่อมต่อกับอินพุตของตัวแปลง DC/DC D3 และ D4 ตัวแปลง D3 สร้างแรงดันไฟฟ้าสำหรับมอเตอร์ D4 – สำหรับการจ่ายไฟให้กับอุปกรณ์อิเล็กทรอนิกส์ทั้งหมด เอาต์พุตของคอนเวอร์เตอร์เหล่านี้เชื่อมต่อกับตัวขับมอเตอร์ D5 ซึ่งมอเตอร์เชื่อมต่ออยู่ เครื่องยนต์ ML1, ML2 ด้านซ้ายเชื่อมต่อกับช่อง MA และเครื่องยนต์ MR1, MR2 ทางด้านขวาเชื่อมต่อกับช่อง MB ไดรเวอร์เป็นแบบดูอัลแชนเนล ซึ่งหมายความว่าจะสามารถควบคุมมอเตอร์สองกลุ่มได้ (แชนเนล A และ B) แต่ไม่ใช่มอเตอร์แต่ละตัวแยกกัน พอร์ต ENA, ENB, IN1-IN4 ใช้สำหรับควบคุมความเร็วและทิศทางการหมุนของมอเตอร์ วงจรต้านทานที่สร้างแรงดันไฟฟ้า Vbat' จะถูกเลือกเพื่อสร้างการวัดและส่งข้อมูลทางไกลของแรงดันไฟฟ้า Vbat ของชุดแบตเตอรี่ในช่วง 0...5 V หาก Vbat = 13 V (ซึ่งไม่ควรเป็นเช่นนั้น เนื่องจากก้อนแบตเตอรี่สามารถผลิตกระแสไฟฟ้าได้สูงสุด 12.6 V แต่ฉันเล่นได้อย่างปลอดภัย) ดังนั้น Vbat' = 3.94 V (นั่นคือ ค่ารับประกันว่าจะไม่ไป เกินขีดจำกัด 5 V) กระแสที่ไหลผ่านวงจรต้านทานที่ 12 V จะเท่ากับ 3.6 mA และฉันคิดว่าการสูญเสียเหล่านี้ยอมรับได้ (ประมาณ 0.1% ด้วยความจุของแบตเตอรี่ 3000 mAh) ช่องเสียบสำหรับจ่ายไฟภายนอกเชื่อมต่อกับอินพุตตัวควบคุม D1 แต่เราเห็นจากแผนภาพว่าต่อผ่านรีเลย์ D2
ก่อนอื่นฉันต้องการอธิบายการมีอยู่ของตัวต้านทาน 10 kOhm ที่ดึงพินตัวใดตัวหนึ่งในขั้วต่อไฟไปที่แรงดันไฟฟ้า 5 V เรามีขั้วต่อไฟที่มีเอาต์พุตสามตัว เอาต์พุตคู่หนึ่งจะส่งแรงดันไฟฟ้าของแหล่งจ่ายไฟ ผลลัพธ์ที่สามเป็นข้อมูล มันถูกปิดไปที่เอาต์พุตเชิงลบ (เราเชื่อมต่อกับกราวด์) หากไม่มีปลั๊กในซ็อกเก็ตและเปิดขึ้นหากเสียบปลั๊กเข้าไปในซ็อกเก็ต ดังนั้นเราจึงได้รับสัญญาณ telemetry Vinon' เกี่ยวกับการเชื่อมต่อแหล่งพลังงาน: หากแรงดันไฟฟ้า Vinon' = 0 แสดงว่าไม่ได้เชื่อมต่อพลังงานภายนอก หาก Vinon' = 5 V แสดงว่าเชื่อมต่อแล้ว ตัวต้านทาน 10 kOhm ดึงเอาต์พุตนี้เป็น 5 V เมื่อเชื่อมต่อปลั๊กกระแส 0.5 mA จะไหลผ่านตัวต้านทานซึ่งค่อนข้างยอมรับได้
เมื่อเชื่อมต่อแหล่งสัญญาณภายนอกผ่านรีเลย์ D2 แบบปิดตามปกติและฟิวส์ FU1 แบตเตอรี่จะเริ่มชาร์จ รีเลย์ปิดตามปกติหมายความว่าเอาต์พุตของมันจะปิดอยู่เสมอและเปิดเฉพาะเมื่อมีการจ่ายแรงดันไฟฟ้าไปที่หน้าสัมผัสควบคุมเท่านั้น ทำไมต้องรีเลย์ D2? สมมุติว่าเราไม่มีรีเลย์นี้ หากต่อแหล่งจ่ายไฟเข้ากับแพลตฟอร์ม แต่คุณลืมเสียบเข้ากับเต้ารับ บอร์ดไมโครคอนโทรลเลอร์จะรู้ได้อย่างไรว่าแบตเตอรี่กำลังชาร์จอยู่หรือไม่ จะเกิดอะไรขึ้นหากเสียบปลั๊กเข้ากับเต้ารับ แต่ไม่มีแรงดันไฟขาออก? หรือทุกอย่างใช้งานได้ แต่แหล่งจ่ายไฟผลิตได้เพียง 10V แทนที่จะเป็น 12V ที่ต้องการ และถ้าฉันเชื่อมต่อแหล่งกำเนิดดังกล่าว (ซึ่งผลิตได้เพียง 10 V) เข้ากับแบตเตอรี่ที่ยังคายประจุไม่หมดและผลิตไฟฟ้าได้ 11 V ฉันจะรู้ได้อย่างไรว่า 11 V เหล่านี้ถูกสร้างขึ้นโดยก้อนแบตเตอรี่ (ซึ่งจริงๆ แล้วไม่ได้ส่งออก สูงกว่า 10 V) หรือแหล่งภายนอก? สำหรับสถานการณ์ดังกล่าว ได้มีการคิดอัลกอริธึมซึ่งจำเป็นต้องใช้รีเลย์ เราเรียนรู้เกี่ยวกับการเชื่อมต่อแหล่งพลังงานภายนอกจากการวัดและส่งข้อมูลทางไกลของ Vinon เราปิดรีเลย์และดูที่การวัดระยะไกลของ Vin หากเหมาะสมกับคุณและแรงดันไฟฟ้านี้อยู่ในช่วงที่คาดหวัง เราจะเปิดรีเลย์และส่งสัญญาณกระบวนการชาร์จ หากคุณไม่พอใจ เราจะไม่เปิดรีเลย์และส่งสัญญาณความผิดปกติ ปล่อยให้บอร์ดควบคุมออนบอร์ดจัดการกระบวนการวิเคราะห์และแสดงผล ไม่ใช่แพลตฟอร์ม ในการทำเช่นนี้เราจะถ่ายโอนแรงดันไฟฟ้าที่จำเป็นทั้งหมดและสัญญาณควบคุมสำหรับรีเลย์ของ Vinoff อินพุตควบคุมของโมดูลรีเลย์ถูกดึงสูงถึง 5 V ผ่านตัวต้านทาน 10 kOhm เพื่อให้มั่นใจว่ารีเลย์เปิดอยู่ตลอดเวลา เมื่อใช้ 0 V กับอินพุตนี้ รีเลย์จะปิด
แต่ทำไมถึงต้องมีการถ่ายทอดทางกลแบบคนต่อต้านคนโง่ล่ะ? ท้ายที่สุดคุณสามารถติดตั้งทรานซิสเตอร์ MOSFET ได้ มีความคิดเช่นนี้ แต่ฉันต้องละทิ้งมัน ทรานซิสเตอร์ MOS สมัยใหม่มีความต้านทานต่ำ (หลายสิบมิลลิโอห์ม) ในสถานะเปิดและเมื่อกระแส 2-5 A ไหลจะไม่มีแรงดันไฟฟ้าตกอย่างมีนัยสำคัญมากและเป็นผลให้ความร้อน - ตัวทรานซิสเตอร์สามารถกระจาย กำลังไฟจำนวนเล็กน้อยแม้ไม่มีหม้อน้ำ แต่ทั้งหมดนี้เกี่ยวข้องกับวงจรที่คีย์ดิจิทัลดังกล่าวจะควบคุมการเชื่อมต่อของแหล่งพลังงานกับโหลดแบบพาสซีฟ เราวางทรานซิสเตอร์ไว้ระหว่างสองแหล่ง ซึ่งส่งผลให้แรงดันไฟฟ้าที่แตกต่างกันระหว่างท่อระบายน้ำและแหล่งกำเนิดมีนัยสำคัญ ซึ่งจะนำไปสู่การสร้างความร้อนที่เพิ่มขึ้น และทรานซิสเตอร์จะร้อนมาก นอกจากนี้ ในการเปิดหรือปิดทรานซิสเตอร์ คุณจะต้องสร้างวงจรควบคุม (ไดรเวอร์) เนื่องจากระดับแรงดันไฟฟ้าควบคุมจากบอร์ดไมโครคอนโทรลเลอร์คือ 5 V ซึ่งไม่เพียงพอที่จะสร้างความแตกต่างของแรงดันไฟฟ้าระหว่างเกตและแหล่งกำเนิดเพื่อควบคุมทรานซิสเตอร์ (ในการควบคุมทรานซิสเตอร์ เช่น IRFZ44N เราจะต้องใช้ไฟ 8-12 V ที่เกตเพื่อเปิด) ไม่ว่าจะด้วยวิธีใด - โมดูลรีเลย์สำเร็จรูปที่ต้องเชื่อมต่อและหากปิดจะรับประกันว่าจะเชื่อมต่อเอาต์พุตเข้ากับอินพุตโดยไม่มีปัญหาใด ๆ
ดังนั้นเราจึงไม่ได้มีเพียงบอร์ดสวิตชิ่งเท่านั้น แต่ยังมีบอร์ดจ่ายไฟที่เต็มเปี่ยมอีกด้วย บอร์ดประกอบด้วยตัวแปลง DC/DC วงจรต้านทาน ฟิวส์ และขั้วต่อจำนวนมากสำหรับเชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์ โครงสร้างสามารถแยกขั้วต่อได้สองตัว ขั้วต่อ CON1 ซึ่งจะเชื่อมต่อชุดแบตเตอรี่ สวิตช์/ปุ่มเปิด/ปิด ขั้วต่อจ่ายไฟ โมดูลรีเลย์ มอเตอร์ บอร์ดควบคุมมอเตอร์ - อุปกรณ์ต่อพ่วงทั้งหมดภายในแพลตฟอร์มจะเชื่อมต่ออยู่ และขั้วต่อ CON2 โดยมีวัตถุประสงค์เพื่อเชื่อมต่อกับบอร์ดควบคุม สัญญาณโทรมาตรและควบคุมแรงดันไฟฟ้า 5 V ถูกส่งไปยังตัวเชื่อมต่อนี้ และยังมีประโยชน์ในการ "ปั๊ม" แรงดันไฟฟ้าจากชุดแบตเตอรี่ Vbat - เราให้โอกาส "ในระดับที่สูงกว่า" เพื่อจัดระเบียบช่องจ่ายไฟของตัวเองด้วยที่แตกต่างกัน แรงดันไฟฟ้า เช่น 6 V เพื่อจ่ายไฟให้กับเซอร์โว
แชสซีอิเล็กทรอนิกส์
โดยเลือกใช้อุปกรณ์อิเล็กทรอนิกส์ควบคู่ไปกับการพัฒนาวงจรไฟฟ้าของอุปกรณ์
ปลั๊กไฟและสวิตช์สลับถูกใช้จากชุดแชสซีที่ได้รับ มีการเลือกและซื้อไดรเวอร์สำหรับมอเตอร์ที่ใช้ชิป L298N, บอร์ดคอนเวอร์เตอร์ DC/DC XL4005, โมดูลรีเลย์ที่ไม่มีชื่อ, ช่องใส่แบตเตอรี่ และแผงวงจรขนาด 50x70 มม. และระยะพิทช์ของรู 2.54 มม.
นอกจากนี้เรายังจะต้องมีวัสดุดังต่อไปนี้ด้วย

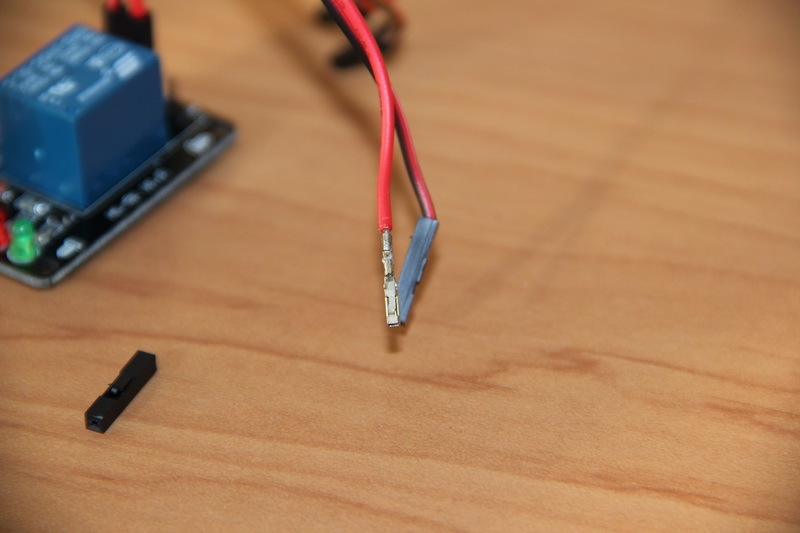
ที่ด้านบนของภาพคุณจะเห็นขั้วต่อพินยาวหลายอันที่มีระยะห่าง 2.54 มม. เช่นเดียวกับซ็อกเก็ต ด้านล่างเป็นหน้าสัมผัสโลหะสำหรับสายเคเบิล ด้านซ้ายเป็นซ็อกเก็ตสำหรับพวกเขา ทางด้านขวาคือสกรู น็อต และ M2 เครื่องซักผ้า ตัวเชื่อมต่อสำหรับบอร์ดและสายเคเบิลเรียกว่าแตกต่างกันในร้านค้าต่างๆ ด้วยเหตุผลทางประวัติศาสตร์ ฉันเรียกขั้วต่อพินสำหรับบอร์ด PLS ซ็อกเก็ตสำหรับบอร์ด PBS และขั้วต่อสำหรับสายเคเบิล BLS บนอินเทอร์เน็ตบนเว็บไซต์ต่างประเทศ ตัวเชื่อมต่อดังกล่าวจะถูกค้นหาโดยใช้ประเภท "ตัวเชื่อมต่อ 2.54 มม." หรือ "ตัวเชื่อมต่อดูปองท์" นอกจากนี้คุณจะต้องมีวัสดุสิ้นเปลืองต่างๆ - บัดกรี, ฟลักซ์, สายไฟ ฯลฯ รวมถึงชุดเครื่องมือช่าง - เครื่องตัดลวด, แหนบ, ไขควง ฯลฯ - ทั้งหมดนี้มักจะมีให้สำหรับผู้ที่ทำอย่างน้อยบางประเภท ของ DIY (Do It Yourself - ทำเอง)
ก่อนที่จะสั่งซื้ออุปกรณ์อิเล็กทรอนิกส์และตัวเครื่อง ฉันคิดว่าอุปกรณ์อิเล็กทรอนิกส์ที่เลือกควรพอดีกับพื้นที่ภายในโดยไม่มีปัญหาใดๆ ถึงเวลาที่ต้องตรวจสอบสิ่งนี้แล้ว: เราจัดเตรียมอุปกรณ์อิเล็กทรอนิกส์และทำเครื่องหมายสถานที่ในอนาคต


ตอนนี้เรามาเริ่มเตรียมบอร์ดกันดีกว่า
ฉันเริ่มต้นด้วยก้อนแบตเตอรี่ ตัวควบคุมแบตเตอรี่ลิเธียมไอออนถูก "ติดตั้ง" บนกาวร้อนละลาย และหมุดสัมผัสถูกบัดกรีตามแผนภาพวงจร ฉันคิดว่าผู้อ่านคงสนใจว่าทำอะไรไปแล้วและใช้เครื่องมืออะไร เลยโพสต์ภาพอุปกรณ์บางส่วนที่ใช้กับความคิดเห็นสั้นๆ ไว้ท้ายบทความใต้สปอยล์ ใช้กาวร้อนละลายโดยใช้ปืนร้อนละลาย อย่างไรก็ตาม ก่อนหน้านั้นฉันต้องทำงานเพื่อปรับปรุงความน่าเชื่อถือของช่องนี้ ฉันจะเตือนทุกคนที่วางแผนจะทำอะไรบางอย่าง - เป็นการดีกว่าที่จะไม่ทำผิดและใช้ช่องใส่แบตเตอรี่ที่ทนทานกว่านี้ ครั้งหนึ่งฉันไม่พบช่องดังกล่าวตามร้านค้าปลีก และเมื่อพบแล้ว ฉันก็รวบรวมหลายช่องด้วยความสุขและความเรียบง่ายจากใจ แต่สำหรับพวกเขาทุกอย่างก็ไม่ง่ายนัก เนื่องจากในช่องนี้ แบตเตอรี่ที่มีแผ่นขั้วบวกแบบแบนและไม่ยื่นออกมาจะไม่เข้าถึงหน้าสัมผัส นอกจากนี้หน้าสัมผัสที่โหลดสปริงทั้งหมดจะหมุนหน้าสัมผัสไม่ดี ดังนั้นฉันจึงต้องขันสลักเกลียว M2 กัดส่วนที่เกินออก ขันน็อตแล้วขันให้แน่นเพื่อปรับปรุงการสัมผัส แต่สิ่งนี้ดูเหมือนจะไม่เพียงพอสำหรับฉัน และฉันก็บัดกรีการเชื่อมต่อทั้งหมดอย่างละเอียดด้วย เพราะถ้าทำอะไรไปแล้วก็ต้องเชื่อถือได้เพื่อไม่ให้เกิดปัญหาในอนาคตและไม่กลับมาทำอีก
ควรสังเกตว่าสำหรับแบตเตอรี่ลิเธียมไอออนจะใช้ตัวควบคุมทั่วไปที่ไม่มีการปรับสมดุล ซึ่งหมายความว่าเมื่อมีการชาร์จแบตเตอรี่ก้อนใดก้อนหนึ่งจากสามก้อน ตัวควบคุมอาจจะรบกวนการชาร์จแบตเตอรี่ทั้งหมด ในความเป็นจริง มันเป็นเพียงแผงป้องกันการคายประจุต่ำและการชาร์จแบตเตอรี่มากเกินไป และการควบคุมกระแสคายประจุ ดังนั้นจึงแนะนำให้ใช้แบตเตอรี่ที่มีความจุจริงเท่ากัน หากคุณใช้คอนโทรลเลอร์ที่มีความสมดุล การเลือกความจุจะมีความสำคัญน้อยลง และแบตเตอรี่จะถูกใช้อย่างมีประสิทธิภาพมากขึ้น แต่คอนโทรลเลอร์ดังกล่าวมีราคาแพงกว่าและใช้พื้นที่มากกว่า จะเลือกแบตเตอรี่ที่มีความจุจริงเท่ากันได้อย่างไร? ท้ายที่สุดแล้ว เมื่อซื้อแบตเตอรี่ที่เหมือนกันจากซีรีย์เดียวกันแม้จะมาจากยี่ห้อต่างๆ ก็ตาม ความจุอาจแตกต่างกันไป 5-10% และแบตเตอรี่ของจีนที่มีป้ายกำกับว่า 6,000-8,000 mAh โดยทั่วไปแล้วจะเป็นแบตเตอรี่ที่ไม่ทราบความจุ ในการวัดความจุจริง ฉันใช้เครื่องชาร์จ OPUS BT-C3100 ซึ่งค่อนข้างได้รับความนิยมในสภาพแวดล้อมของฉัน ด้วยความช่วยเหลือ มีการตรวจสอบแบตเตอรี่ที่ซื้อมา 12 ก้อนและเลือกสามก้อนซึ่งมีช่วงความจุน้อยที่สุดและไม่เกินสองสามเปอร์เซ็นต์ ความจุของแบตเตอรี่ LG LGABC21865 ระบุไว้ที่ 2800 mAh แต่ในความเป็นจริงแล้วมีความผันผวนในช่วง 2,400-2500 mAh (ทดสอบที่กระแส 700 mA)
การพูดนอกเรื่องสั้น ๆ ในรูปแบบของการสะท้อน เครื่องชาร์จคำนวณความจุของแบตเตอรี่สำหรับเราโดยคำนึงถึงการชาร์จเป็น 4.2 V และการคายประจุ หากจำไม่ผิดว่าเป็น OPUS BT-C3100 เป็น 2.8 V แบตเตอรี่ของเราไม่ควรคายประจุน้อยกว่าค่าที่กำหนดที่ 3.5- 3, 7 V. นั่นคือความจุของแบตเตอรี่ที่ใช้งานของเราต่ำกว่าที่วัดได้มาก สิ่งนี้จะต้องนำมาพิจารณา บางทีในอนาคตก็ควรพิจารณาชุดแบตเตอรี่สี่ก้อน เป็นไปได้ไหมที่จะเปลี่ยนแบตเตอรี่และแหล่งจ่ายไฟเพื่อชาร์จ ลองคิดดูสิ เราจะได้ช่วงแรงดันไฟฟ้า 14.4-16.8 V ตัวแปลงแรงดันไฟฟ้าทำงานกับแรงดันไฟฟ้าอินพุตสูงถึง 32 V ตัวแบ่งตัวต้านทานจะให้ช่วงแรงดันไฟฟ้าของสัญญาณ telemetry ที่ 4.3-5.1 V ซึ่งเกินช่วงบนเล็กน้อยที่ 0- 5 Q. แต่สิ่งนี้สามารถตอบโต้ได้ที่ระดับของแผงควบคุม - หากแรงดันไฟฟ้าโทรมาตรเป็น 5 V แสดงว่าก้อนแบตเตอรี่เกือบจะชาร์จหลังจากนั้นไม่นาน ในทางกลับกัน หากคุณลดแรงดันไฟฟ้าให้กับมอเตอร์ลงเหลือ 6-7 V คุณสามารถคายประจุแบตเตอรี่ที่มีอยู่ได้มากขึ้น และใช้แบตเตอรี่ได้อย่างมีประสิทธิภาพมากขึ้น - ในกรณีนี้ คุณจะต้องปรับตัวแปลงแรงดันไฟฟ้าเพียงตัวเดียวเท่านั้น เมื่อมองแวบแรก มีขอบเขตสำหรับการวิจัยในอนาคตโดยไม่ต้องเปลี่ยนฮาร์ดแวร์เลย และวิธีการตีความสัญญาณโทรมาตรอย่างแน่นอนโดยขึ้นอยู่กับชุดแบตเตอรี่ที่ติดตั้ง - ให้ตัดสินใจที่ระดับของแผงควบคุมนั่นคือตอนนี้คุณไม่ต้อง ไม่ต้องคิดเกี่ยวกับมัน
ฉันถอดสายไฟเอาท์พุตออกจากก้อนแบตเตอรี่ที่ได้โดยใช้คีมพิเศษ (เครื่องปอก) และขันให้เป็นหน้าสัมผัสโลหะโดยใช้คีมย้ำ (คีมย้ำ) บัดกรีเพื่อความน่าเชื่อถือและใส่กล่องพลาสติกไว้เพื่อรับขั้วต่อ BLS เมื่อทำการบัดกรี มีการใช้สถานีบัดกรี POS-61 ที่ไม่มีขัดสนถูกใช้เป็นบัดกรี และใช้ FluxPlus NC-D500 ที่ไม่ทำความสะอาดเป็นฟลักซ์



หลังจากประกอบก้อนแบตเตอรี่และติดตั้งแบตเตอรี่เข้าไปแล้ว จะไม่มีเอาต์พุตใดๆ ออกมา นี่คือจำนวนตัวควบคุมแบตเตอรี่ลิเธียมไอออนที่ได้รับการออกแบบ โดยจะตัดพลังงานโหลดเมื่อมีการลัดวงจร การคายประจุที่รุนแรง หรือกระแสไฟคายประจุส่วนเกิน ในการ "รีเซ็ต" การป้องกันและทำให้ก้อนแบตเตอรี่กลับสู่สภาพการทำงาน คุณต้องจ่ายไฟ 12-12.6 V ไปที่หน้าสัมผัส +P/-P ต้องทำเช่นเดียวกันหลังจากเชื่อมต่อแบตเตอรี่เข้ากับคอนโทรลเลอร์เป็นครั้งแรก หลังจากนี้ คุณสามารถตรวจสอบได้ว่าเครื่องสร้างแรงดันไฟฟ้าหากแบตเตอรี่เชื่อมต่อกับคอนโทรลเลอร์อย่างถูกต้อง
ในการชาร์จแบตเตอรี่ดังกล่าว มีแหล่งจ่ายไฟที่มีแรงดันเอาต์พุต 12.6 V (3x4.2 V) ด้วยแหล่งจ่ายไฟดังกล่าวแบตเตอรี่จะถูกใช้อย่างมีประสิทธิภาพมากขึ้นแม้ว่าจะสามารถใช้แหล่งจ่ายไฟที่มีพิกัด 12 V ได้เช่นกัน ฉันมีแหล่งจ่ายไฟดังกล่าวซึ่งมีเอาต์พุต 12.6 V และกระแส 5 A อยู่แล้วหากมีแหล่งกำเนิดที่คล้ายกัน ซื้อแล้วควรตรวจสอบว่าสอดคล้องกับคุณสมบัติที่ประกาศหรือไม่ การทดสอบที่ง่ายที่สุดคือการตรวจสอบความสามารถในการรับน้ำหนัก สำหรับสิ่งนี้ฉันใช้ตัวต้านทานเซรามิกที่มีค่าเล็กน้อย 1 โอห์ม 10 W และ 4.7 โอห์ม 10 W เมื่อประกอบชุดประกอบที่มีความต้านทาน 2.5 โอห์มจากตัวต้านทานดังกล่าวแล้ว ฉันจึงเชื่อมต่อแหล่งจ่ายไฟเข้ากับมันและวัดแรงดันไฟฟ้าที่เอาต์พุต ด้วยกระแสไฟฟ้าที่คำนวณได้ 12.6/2.5 = 5 A แหล่งจ่ายไฟของฉันผลิตได้ 12.6 V ซึ่งเป็นผลลัพธ์ที่ยอดเยี่ยม แหล่งจ่ายไฟของจีนซึ่งพูดอะไรบางอย่างเช่น 12V3A มักจะเริ่ม "ลดลง" 10-20% โดยมีโหลดเพียงประมาณ 1 A


โดยการเปรียบเทียบได้เตรียมสวิตช์และปลั๊กไฟไว้แล้ว

เทอร์มินัลบล็อกถูกถอดออกจากโมดูลรีเลย์โดยใช้เครื่องเป่าผม และหน้าสัมผัส PLS ถูกบัดกรี ในการเชื่อมต่อโมดูลนี้เข้ากับแผงจ่ายไฟฉันทำสายไฟ - ฉันปอก, จีบและบัดกรีสายไฟ (ซึ่งจะเชื่อมต่อขั้วต่อสายไฟและชุดแบตเตอรี่) ด้วยหน้าตัด 18-20 AWG และเพื่อการควบคุม ฉันใช้สายไฟที่ฉันมี ซึ่งมีแกนที่บางกว่า ซึ่งสามารถค้นหาได้ง่ายด้วยชื่อ "Dupont"

เช่นเดียวกับไดรเวอร์มอเตอร์


“ขา” ถูกบัดกรีเข้ากับตัวแปลง DC/DC เป็นมูลค่าการกล่าวขวัญว่าหน้าสัมผัสเหล่านี้ทำจากโลหะที่สามารถบัดกรีได้ดีกับฟลักซ์ที่ใช้งานอยู่เท่านั้น จากนั้น แทนที่จะใช้ FluxPlus ฉันใช้ LTI-120 ตามด้วยการเช็ดบริเวณบัดกรีด้วยผ้าชุบไอโซโพรพานอลเพื่อกำจัดฟลักซ์ที่ตกค้าง

ตอนนี้เราสร้างบอร์ดของเราด้วยอุปกรณ์อิเล็กทรอนิกส์ ขั้นแรก เป็นความคิดที่ดีที่จะจินตนาการโดยทั่วไปว่าจะเชื่อมโยงกันอย่างไรและอย่างไรบนกระดาน นั่นคือลองวาดแผงวงจร
[บอร์ดจ่ายไฟ]

เดาว่าฉันคิดมาจากไหนและ "เลีย" กระดานนี้? เราเห็นตัวเชื่อมต่อสองตัวบนบอร์ดตัวแปลงแรงดันไฟฟ้าสองตัว จัมเปอร์เพิ่มเติม (จัมเปอร์แบบถอดได้) ปรากฏขึ้นซึ่งสามารถติดตั้งได้โดยแยกฟิวส์ออกจากวงจรไฟฟ้า - ฉันทำสิ่งนี้โดยเฉพาะเนื่องจากไม่มีฟิวส์ซ้ำ ๆ กันในขณะที่ผลิตบอร์ด
การเดินสายไฟของบอร์ดค่อนข้างน่าเบื่อและต้องใช้ความอุตสาหะ สำหรับพลังงานฉันใช้สายไฟที่มีหน้าตัด 18-20 AWG สำหรับสัญญาณอื่น - 26-30 AWG เหตุใดเขียงหั่นขนมและความยุ่งยากในการเดินสายไฟ? เพราะเรายังมีแค่ต้นแบบตัวแรกเท่านั้น บางสิ่งบางอย่างสามารถเปลี่ยนแปลงได้ ดังนั้นการบัดกรีสายไฟใหม่จึงง่ายกว่าการตัดรางและการบัดกรีจัมเปอร์ทุกประเภทบนแผงวงจรพิมพ์ที่เสร็จแล้ว การสร้างแผงวงจรพิมพ์ต้องใช้เวลา - การวาง, การทำมาสก์, การแกะสลัก, การเจาะ, การยึดติด, การบัดกรี - ไม่น่าจะใช้เวลาน้อยกว่าการทำบอร์ดด้วย "การเดินสายไฟ" แม้ว่าแผงวงจรพิมพ์จะมีความน่าเชื่อถือมากกว่าและดูเป็นมืออาชีพมากกว่า
ด้วยเหตุผลเดียวกัน โมดูลตัวแปลง DC/DC จะไม่ถูกบัดกรีบนบอร์ด แต่ถูกสร้างขึ้นในรูปแบบของโมดูลแบบถอดได้ ตามหลักการแล้ว หลังจากการดีบักครั้งแรก โมดูลจะต้องยึดเข้ากับตัวเชื่อมต่อเพิ่มเติม เช่น โดยการหยดกาวร้อน เป็นความคิดที่ดีที่จะใช้วิธีการเดียวกันเพื่อเพิ่มความน่าเชื่อถือของการเชื่อมต่อของขั้วต่อทั้งหมด แต่ในขณะที่เรามีต้นแบบ มันสะดวกกว่าสำหรับเราที่จะทำให้ทุกอย่างถอดออกได้ เพื่อว่าในระหว่างการดีบักในอนาคต เราสามารถเข้าถึงส่วนประกอบที่สำคัญใดๆ ได้ฟรี และช่วยให้เปลี่ยนได้ง่ายขึ้นหากจำเป็น




หลังจากผลิตบอร์ดแล้ว จำเป็นต้องตรวจสอบสิ่งที่ได้รับว่าสอดคล้องกับวงจรและไดอะแกรมสายไฟ ใช้มัลติมิเตอร์ฉันตรวจสอบอินพุตและเอาต์พุตสำหรับการลัดวงจร (เป็นการดีกว่าที่จะไม่ "ส่งเสียง" หน้าสัมผัส แต่เพื่อวัดความต้านทานเนื่องจากในกรณีของการผลิตหรือการออกแบบที่ผิดพลาดเช่นความต้านทานหนึ่งร้อยโอห์มอาจ เกิดขึ้นที่อินพุตซึ่งอาจไม่ใช่ "วงแหวน" "แต่การมีอยู่ของมันจะเป็นข้อผิดพลาดในวงจรและอาจทำให้เกิดปัญหาใหญ่ได้) และฉันก็ตรวจสอบให้แน่ใจด้วยว่าทุกอย่างเชื่อมต่อตามความจำเป็นภายในบอร์ด
หลังจากตรวจสอบก่อนประกอบ คุณควรตรวจสอบให้แน่ใจว่าบอร์ดทำงานได้ตามปกติเมื่อเชื่อมต่ออุปกรณ์ต่อพ่วงทั้งหมดแล้ว ในการดำเนินการนี้ คุณต้องเชื่อมต่อชุดแบตเตอรี่ สวิตช์เปิด/ปิด และพลิกสวิตช์ก่อน ไฟ LED บนตัวแปลงแรงดันไฟฟ้าควรสว่างขึ้นและไม่มีอะไรจะไหม้ แม้ว่าจะไม่มีการเชื่อมต่อใดๆ ก็ตาม แต่ก็จำเป็นต้องปรับแรงดันไฟเอาท์พุตของคอนเวอร์เตอร์ จากนั้นปิดเครื่อง เชื่อมต่อโมดูลรีเลย์แล้วจ่ายไฟอีกครั้ง ด้วยวิธีนี้ อุปกรณ์ต่อพ่วงทั้งหมดจึงเชื่อมต่อกันทีละขั้นตอนและอยู่ภายใต้การควบคุม
การติดตั้งและการเชื่อมต่อแพลตฟอร์มอิเล็กทรอนิกส์
อุปกรณ์อิเล็กทรอนิกส์พร้อมแล้ว ตอนนี้คุณต้องติดตั้งมัน จำได้ไหมว่าที่นั่งของกระดานอิเล็กทรอนิกส์ถูกทำเครื่องหมายไว้? ใช้ไขควงไร้สายเจาะรูในตำแหน่งที่ต้องการ จากนั้นจึงขัดด้วยสว่านขนาดเล็กพร้อมอุปกรณ์ขัด ขันสกรู M2 เข้าไปในรู ต้องวางแหวนรองไว้ใต้สกรูและน็อต นอกจากนี้ฉันขันน็อตตัวที่สองด้วย - น็อตล็อคจะให้การเชื่อมต่อแบบเกลียวที่เชื่อถือได้มากขึ้นและลดโอกาสที่จะคลายเกลียว เรากำลังสร้างเครื่องจักร
ฉันสังเกตว่าระยะห่างระหว่างเครื่องยนต์สองเครื่องที่อยู่ติดกันนั้นค่อนข้างใหญ่ นี่เป็นประเด็นสำคัญที่ควรทราบด้วยเหตุผลดังต่อไปนี้ ความจริงก็คือเครื่องยนต์ที่เลือกนั้นไม่มีการตอบสนอง เราเพียงแค่ใช้ระดับแรงดันไฟฟ้ากับพวกมัน และพวกมันจะหมุนด้วยความเร็วที่แน่นอน แต่ลักษณะของเครื่องยนต์อาจแตกต่างกันซึ่งจะทำให้เกิดปัญหาเมื่อขับทางตรงอย่างแน่นอน หากการแพร่กระจายของมอเตอร์มีขนาดเล็กและหุ่นยนต์จะถูกควบคุมโดยผู้ปฏิบัติงานเท่านั้น ซึ่งสามารถแก้ไขการเคลื่อนไหวได้ตลอดเวลา นี่อาจไม่ใช่ปัญหาสำคัญ แต่หากการแพร่กระจายมีนัยสำคัญหรือหุ่นยนต์จะต้องเดินทางระยะไกล "เป็นเส้นตรง" ในโหมดอัตโนมัติ ก็จำเป็นต้องให้ข้อเสนอแนะ มีเครื่องยนต์ GM25-370 หลายรุ่นที่มีการออกแบบเหมือนกันซึ่งมีการติดตั้งเซ็นเซอร์ฮอลล์ไว้แล้ว มันคืออะไร? ที่ด้านหลังของเครื่องยนต์บนเพลายาวจะมีดิสก์ติดอยู่โดยมีแม่เหล็กติดอยู่ซึ่งจะส่งผลต่อเซ็นเซอร์ฮอลล์ หลังจากการปฏิวัติดิสก์จนเต็มแต่ละครั้ง เราจะได้รับสัญญาณพัลส์ โดยการประมวลผลซึ่งเราสามารถกำหนดจำนวนรอบต่อนาทีได้ ดังนั้นแพลตฟอร์มของเราจึงมีรากฐานที่ค่อนข้างจริงจังสำหรับอนาคต: เป็นไปได้ที่จะติดตั้งมอเตอร์พร้อมฟีดแบ็ก เชื่อมต่อเข้ากับบอร์ดจ่ายไฟที่จะจ่ายไฟให้กับเซ็นเซอร์และส่งสัญญาณ telemetry ไปยังแผงควบคุม - ระบบควบคุมสามารถทำได้โดยอัตโนมัติ ปรับความเร็วของมอเตอร์ให้เท่ากัน


ฉันบัดกรีสายไฟเข้ากับมอเตอร์ตามเครื่องหมายบนมอเตอร์แต่ละตัวจะมีจุดสีแดงใกล้กับหนึ่งในสองหน้าสัมผัส หลังจากได้รับเครื่องยนต์แล้วฉันก็ตรวจสอบ แต่ไม่ได้ใส่ใจกับความถูกต้องของเครื่องหมายนี้ อย่างไรก็ตามเครื่องยนต์ตัวหนึ่งมาถึงมีข้อบกพร่องและไม่ได้หมุนเลย ผู้ขายกรุณาส่งเครื่องทดแทนมาให้ฉัน ซึ่งใช้เวลาอย่างน้อยหนึ่งเดือนกว่าจะมาถึงฉัน ต่อจากนั้นปรากฎว่าเครื่องหมายของมอเตอร์ตัวใดตัวหนึ่งปะปนกัน แต่นี่ไม่ใช่ปัญหา - เพียงแค่เปลี่ยนขั้วของการเชื่อมต่อมอเตอร์นี้เข้ากับแผงจ่ายไฟ เมื่อมองไปข้างหน้าฉันจะบอกว่าสถานการณ์เดียวกันนี้เกิดขึ้นกับการเชื่อมต่อของ "ด้านข้าง" - เมื่อได้รับคำสั่ง "ไปข้างหน้า" ล้อที่อยู่ทางด้านขวาจะหมุนไปข้างหน้าและทางด้านซ้ายไปข้างหลัง นอกจากนี้ยังสามารถแก้ไขได้โดยการเปลี่ยนขั้วของการเชื่อมต่อช่องไดรเวอร์มอเตอร์ที่ต้องการเข้ากับแผงจ่ายไฟ การเปลี่ยนขั้วของการเชื่อมต่อ - ไม่จำเป็นต้องบัดกรีหรือทำซ้ำสิ่งใด คุณเพียงแค่ต้องเปลี่ยนสายไฟ
เพื่อกำจัดการสัมผัสทางไฟฟ้าระหว่างบอร์ดอิเล็กทรอนิกส์และเคส ฉันจึงตัดแผ่นพลาสติกจากกล่องบลิสเตอร์ไปที่ด้านล่างของแท่น

ติดตั้งก้อนแบตเตอรี่ พลาสติกมีความอ่อนมากและหย่อนคล้อยอยู่ใต้หัวสกรู แม้แต่แหวนรองก็ช่วยไม่ได้ ฉันเลยต้องใช้แผ่นโลหะยาวๆ


สลักเกลียวและน็อตทั้งหมดของเราที่อยู่ด้านล่างทำให้ระยะห่างจากพื้นลดลงเล็กน้อยและดูสวยงามทีเดียว

เราหุ้มฉนวนด้านล่างที่ติดตั้งบอร์ดอิเล็กทรอนิกส์ นอกจากนี้เรายังตัดและวางแถบพลาสติกบนแผ่นโลหะในชุดแบตเตอรี่เพื่อป้องกันไม่ให้แม้แต่กล่องแบตเตอรี่เกิดรอยขีดข่วนบนหัวสกรู ลิเธียมเป็นเรื่องร้ายแรง!


เราติดตั้งและขันสกรูบอร์ดอิเล็กทรอนิกส์และขั้วต่อสายไฟ






ฝันร้ายมาก มีสายไฟกี่เส้น... เราเชื่อมต่ออุปกรณ์ต่อพ่วงเข้ากับบอร์ดจ่ายไฟ


อุปกรณ์อิเล็กทรอนิกส์ควบคุมแพลตฟอร์ม
ตามหลักการแล้วงานจะเสร็จสิ้นตามที่คุณเข้าใจ ได้รับแพลตฟอร์มแล้ว ทุกอย่างค่อนข้างประสบความสำเร็จ ในการควบคุมแพลตฟอร์ม คุณสามารถใช้ไมโครคอนโทรลเลอร์, FPGA, บอร์ด Arduino, Intel Galileo เป็นต้นฉันเลือกบอร์ด Arduino Nano พบบอร์ดขยายราคาไม่แพงและสะดวกสบายสำหรับเชื่อมต่ออุปกรณ์ต่อพ่วงและโมดูลบลูทูธสำหรับมัน แนวคิดพื้นฐานคือการควบคุมแพลตฟอร์มของเราจากสมาร์ทโฟนผ่านบลูทูธ บอร์ดขยายที่มีหน้าสัมผัสมากมายสำหรับเชื่อมต่ออุปกรณ์ภายนอก จะช่วยให้คุณเชื่อมต่ออุปกรณ์ต่อพ่วงหุ่นยนต์ในอนาคตได้อย่างราบรื่นในอนาคต


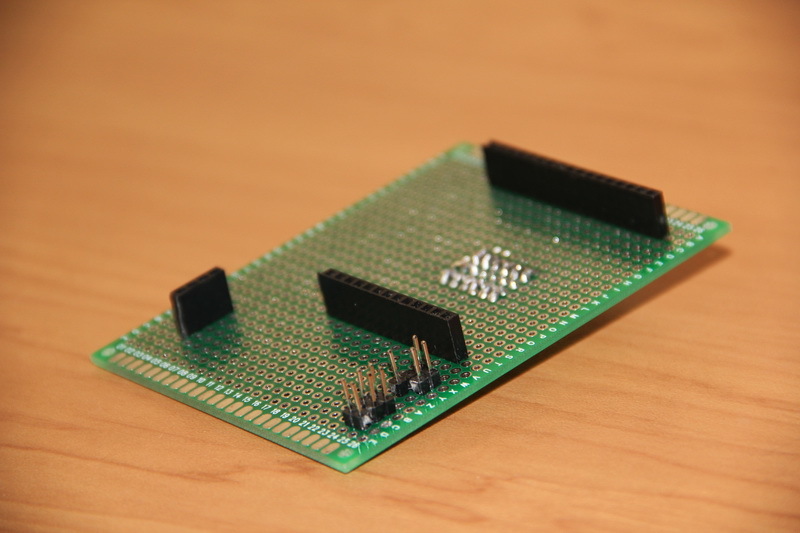
ตอนนี้เราจำเป็นต้องออกแบบและสร้างแผงวงจรสำหรับอุปกรณ์อิเล็กทรอนิกส์เหล่านี้ เราจะสร้าง "แซนวิช": แผงวงจรที่ติดตั้งโมดูลบลูทู ธ และบอร์ดขยายซึ่งในทางกลับกันจะติดตั้งบอร์ดที่มีไมโครคอนโทรลเลอร์

เมื่อเทียบกับบอร์ดจ่ายไฟ บอร์ดนี้แทบจะเป็นบอร์ดสวิตชิ่งล้วนๆ ตรงกลางมีการเชื่อมต่อสายเคเบิลเข้ากับขั้วต่อสามแถว 18 พินที่เชื่อมต่อบอร์ดควบคุมนี้กับบอร์ดจ่ายไฟ จากตัวเชื่อมต่อนี้ สัญญาณจะถูกส่งไปยังหน้าสัมผัสที่ต้องการของบอร์ดขยาย จากนั้นไปที่หน้าสัมผัสของไมโครคอนโทรลเลอร์ที่เลือกไว้ล่วงหน้าที่ต้องการ นอกจากนี้ยังมีเอาต์พุต 5 V และ Vbat เพื่อแยกหน้าสัมผัสบนบอร์ด บอร์ดจ่ายไฟให้กับโมดูลบลูทูธ โดยอินพุต Rx/Tx เชื่อมต่อกับอินพุต Rx/Tx ของบอร์ด Arduino Nano ผ่านบอร์ดขยาย บอร์ดนี้มีไฟ LED ไบโพลาร์แบบถอดได้ ซึ่งมีจุดประสงค์เพื่อระบุกระบวนการทั้งหมดที่เกี่ยวข้องกับพลังงาน LED สามารถสร้างแสงเรืองแสงคงที่เป็นสีเขียวและสีแดง กระพริบตามความถี่ที่กำหนด - ซึ่งควรจะเพียงพอที่จะระบุแรงดันไฟฟ้าปกติของก้อนแบตเตอรี่ การคายประจุ ระบุกระบวนการชาร์จ และระบุความสมบูรณ์ของแหล่งพลังงานที่เชื่อมต่อ
เพื่อไม่ให้สับสนเกี่ยวกับสิ่งที่ต้องเชื่อมต่อฉันจึงวาดบอร์ด Arduino Nano ตามแผนผังและกระจายสัญญาณให้

พอร์ต Rx/Tx ถูกครอบครองโดยโมดูลบลูทูธที่ทำงานโดยใช้โปรโตคอล UART ถ้าเป็นไปได้ สัญญาณ IN1-IN4 จะเชื่อมต่อกับพอร์ตดิจิตอล - ขั้วของสัญญาณเหล่านี้จะกำหนดทิศทางการหมุนของมอเตอร์ และ ENA/ENB ไปยังพอร์ตเหล่านั้นที่อนุญาตให้ส่งสัญญาณเอาต์พุต PWM - สัญญาณเหล่านี้จะตั้งค่าความเร็วในการหมุน ของมอเตอร์ ค่าสัญญาณ telemetry ของแพลตฟอร์มจะถูกแปลงเป็นดิจิทัลโดยอินพุตอะนาล็อก A0-A3 ของบอร์ด Arduino Nano LED ตรงบริเวณพอร์ต A4 และ A5 และเชื่อมต่อผ่านจัมเปอร์ ความจริงก็คือว่าทั้งสองพอร์ตนี้จำเป็นสำหรับการจัดระเบียบโปรโตคอล I2C อย่างง่าย และหากเราต้องการเราก็สามารถถอดจัมเปอร์ออกได้ LED สามารถ "โยน" ไปยังพอร์ตว่างอื่น ๆ หรือเชื่อมต่อกับพอร์ตอิสระ A4 และ A5 โดยโมดูลขยายพอร์ต (เช่น ขึ้นอยู่กับชิป PCF8574T - โดยจะให้พอร์ตอินพุต/เอาท์พุตดิจิทัลเพิ่มเติมแปดพอร์ต โมดูลคือ ควบคุมผ่านโปรโตคอล I2C) ไปยังพินคู่และเชื่อมต่อ LED จากการกระจายการเชื่อมต่อนี้ ความสามารถในการเชื่อมต่ออุปกรณ์ SPI ได้อย่างราบรื่น แปลงสัญญาณอะนาล็อกอีกสองตัวเป็นดิจิทัล และส่งสัญญาณ PWM สูงสุดสี่สัญญาณ (เช่น เพื่อควบคุมเซอร์โว) จะยังคงอยู่ โดยทั่วไปฉันต้องการสัญญาณฟรีมากขึ้น แต่สามารถเพิ่มจำนวนได้โดยใช้ PCF8574T ในท้ายที่สุดคุณสามารถใช้ Arduino Nano ตัวอื่นหรือแทนที่ด้วยแพลตฟอร์มที่เหมาะสมกว่าสำหรับงานที่ต้องการ - โซลูชันนี้ให้ขั้นต่ำที่แน่นอนอย่างสมบูรณ์
บอร์ดของเรายังเชื่อมต่อกับแหล่งจ่ายไฟได้อย่างง่ายดาย: มีหน้าสัมผัสสำหรับกำลังไฟ 5 V และแรงดันไฟฟ้าจากชุดแบตเตอรี่ (สูงสุด 12.6 V)
เป็นที่น่าสังเกตถึงความแตกต่างเล็กน้อยของบอร์ดขยายที่ใช้สำหรับ Arduino Nano โดยหลักการแล้ว บอร์ดขยายทำให้คุณสามารถรัน Vbat ได้ มีการติดตั้งตัวแปลงแรงดันไฟฟ้าบนบอร์ดขยายซึ่งจะลดแรงดันไฟฟ้าอินพุตลงเหลือ 5 V และจ่ายให้กับบอร์ด Arduino Nano ซึ่งตัวแปลงจะลดแรงดันไฟฟ้าลงเหลือ 3.3 V และแรงดันไฟฟ้านี้จะถูกลบออกจากบอร์ด Arduino Nano และกระจายไปยัง หน้าสัมผัสที่สอดคล้องกันของบอร์ดขยาย อย่างไรก็ตามฉันไม่ได้ทำสิ่งนี้และเชื่อมต่อ 5 V เข้ากับหน้าสัมผัสที่เกี่ยวข้องของบอร์ดขยาย นอกจากนี้ LED ควบคุมบนบอร์ดขยายจะไม่ติดสว่างเลยหากไม่ได้ติดตั้งบอร์ด Arduino Nano นั่นคือบอร์ดขยายที่ไม่มี Arduino Nano ดูเหมือนจะใช้งานไม่ได้จริง ฉันไม่ได้ดูเหตุผล แต่ฉันสังเกตประเด็นนี้
เรากำลังสร้างบอร์ดควบคุมนี้


เราติดตั้งบอร์ดอิเล็กทรอนิกส์ไว้



เรากำลังเตรียมที่นั่งสำหรับคณะกรรมการของเรา ในเวลาเดียวกันเราติดตั้งสวิตช์


และเรารวบรวมทุกอย่าง


ตอนนี้คุณต้องสร้างสายเคเบิลเพื่อเชื่อมต่อบอร์ดทั้งสอง นอกจากนี้เรายังประสานขั้วต่อสายไฟเพื่อความน่าเชื่อถือ เราตรวจสอบทุกอย่างถูกต้องและรอบคอบมาก 12 V ควรมาที่ 12 V และ 5 V ควรมาที่ 5 V รูปภาพของแผงจ่ายไฟและแผงวงจรควบคุมแสดง "มุมมองด้านบน" นั่นคือถ้าคุณพลิกบอร์ดกลับด้านจากนั้นที่ด้านล่างด้านบัดกรีของ บอร์ดสลับหน้าสัมผัส - นี่เป็นสิ่งจำเป็น คำนึงถึงในการผลิตสายเคเบิลและส่งผ่านสายไฟที่เกี่ยวข้องในนั้น ฉันสร้างตัวเชื่อมต่อง่ายๆ: ขั้นแรก ฉันประกอบสายไฟหลายชุดที่มีขั้วต่อ BLS แล้วพันด้วยเทปสองครั้ง จากนั้นนำแถวทั้งหมดสองสามแถวมารวมกันแล้วพันด้วยเทปให้แน่นอีกครั้ง ผลลัพธ์ที่ได้คือตัวเชื่อมต่อที่สมบูรณ์และเป็นเสาหิน ขั้วต่อพลาสติก BLS ที่ไม่มีหน้าสัมผัสถูกวางลงในหมุดขั้วต่อที่ไม่ได้ใช้
หลังจากสร้างสายเคเบิลแล้ว แผงอิเล็กทรอนิกส์ทั้งหมดจะถูกถอดออกจากแผงควบคุม และตรวจสอบโดยใช้มัลติมิเตอร์ในลักษณะเดียวกับแผงจ่ายไฟ เราเชื่อมต่อบอร์ดควบคุมเข้ากับบอร์ดจ่ายไฟและจ่ายไฟ เมื่อใช้มัลติมิเตอร์ เราจะตรวจสอบหน้าสัมผัสกำลังของโมดูลทั้งหมดอย่างระมัดระวัง สอบถามเกี่ยวกับแรงดันไฟฟ้าของสัญญาณโทรมาตร - เราตรวจสอบให้แน่ใจอีกครั้งว่าทุกอย่างเดินสายอย่างถูกต้อง คุณไม่จำเป็นต้องทำเช่นนี้ ประกอบทุกอย่างอย่างมั่นใจ จ่ายไฟ และค้นพบว่าสายไฟ 5 V และ Vbat ปะปนกัน และบอร์ด Arduino และโมดูลบลูทูธของเราก็หมดแรงในวิธีที่ลึกลับบางอย่าง แต่เป็นการดีกว่าที่จะไม่ทำผิดของคนอื่นซ้ำ
ในภาพคุณจะเห็นว่าสายไฟสีแดงเส้นหนึ่งเป็นสีเงิน นี่คือการกำหนดตัวนำที่ส่งแรงดันไฟฟ้า Vbat เมื่อประกอบอุปกรณ์ การสร้าง "กุญแจ" สำหรับการเชื่อมต่อจะมีประโยชน์ ตัวอย่างเช่นอย่าจงใจประสานหน้าสัมผัส PLS หนึ่งอันบนตัวเชื่อมต่อ แต่ทำให้ช่องเสียบการผสมพันธุ์ในสายเคเบิลเสียหายหรืออุดตันด้วยฉนวน - ในกรณีนี้มีการใช้ "การป้องกันความผิดพลาด" เนื่องจากสามารถติดตั้งสายเคเบิลดังกล่าวได้เท่านั้น แม่นยำบนตัวเชื่อมต่อที่เกี่ยวข้องบนบอร์ดเพียงเพราะมันจะไม่ติดตั้งเป็นอย่างอื่น (วิธีการนี้ไม่ได้ให้การรับประกัน 100% - อินเทอร์เน็ตเต็มไปด้วยภาพที่บุคคลที่มีความมุ่งมั่นโดยเฉพาะสามารถจัดการเพื่อหลีกเลี่ยงการป้องกันดังกล่าวได้โดยใช้ความพากเพียรที่น่าอิจฉาและความแข็งแกร่งที่น่าทึ่งของพวกเขา ). ฉันมักจะแต้มพินที่สอดคล้องกันบนตัวเชื่อมต่อ มันจะมีประโยชน์ในการทำเครื่องหมายขั้วต่ออินพุตของตัวแปลง DC/DC บนแผงจ่ายไฟและแต้มสีซ็อกเก็ตที่เกี่ยวข้องบนบอร์ด วิธีนี้จะป้องกันไม่ให้ติดตั้งคอนเวอร์เตอร์ไม่ถูกต้องและหากคุณใช้หลายสีจะป้องกันไม่ให้บอร์ดคอนเวอร์เตอร์ที่มีไฟ 5 V และ 9 V ปะปนกัน คุณสามารถใช้ยาทาเล็บของผู้หญิงสีสดใสเพื่อกำหนดได้ กฎเล็กๆ น้อยๆ นี้ช่วยได้อย่างมากในการประกอบ/ถอดชิ้นส่วนอุปกรณ์ที่กำลังพัฒนาในขั้นตอนการแก้ไขข้อบกพร่องและการทดสอบ



เราเชื่อมต่อสายเคเบิลเข้ากับบอร์ดจ่ายไฟ
ฉันอยากจะกลับไปที่จุดเริ่มต้นของบทความสั้น ๆ ถึงช่วงเวลาที่เราแบ่งแพลตฟอร์มออกเป็นสองส่วนและนำแผงควบคุมออกมา "แยกกัน" ในเวลานั้น ดูเหมือนเป็นการตัดสินใจที่สมดุลมาก อย่างไรก็ตาม เมื่อดูที่ช่องสัมผัสที่มีมากมายบนบอร์ดขยาย Arduino เราเข้าใจดีว่าครึ่งหนึ่งของหน้าสัมผัสเหล่านี้ไม่สามารถใช้กับการใช้งานแพลตฟอร์มในปัจจุบันได้ - เราใช้เกือบครึ่งหนึ่งของตัวเชื่อมต่ออินพุต/เอาท์พุตบนบอร์ด Arduino และไมโครคอนโทรลเลอร์เองก็ "ทำงาน" ไม่ใช่แค่โปรแกรมสำหรับส่งสัญญาณ PWM คู่หนึ่งไปยังมอเตอร์ แต่ยังให้การควบคุมแหล่งจ่ายไฟภายในและภายนอกของแพลตฟอร์มทั้งหมดได้อย่างสมบูรณ์ เป็นเรื่องที่ควรค่าแก่การคิด - อาจคุ้มค่าที่จะรวมไมโครคอนโทรลเลอร์ไว้ในห้องเครื่องของแพลตฟอร์มของเราหรือไม่ “มอบบลูทูธ” ให้กับอุปกรณ์อิเล็กทรอนิกส์ “เหนือแพลตฟอร์ม” ที่จะควบคุมอุปกรณ์ของหุ่นยนต์ และคิดผ่านอินเทอร์เฟซกับอุปกรณ์ดังกล่าว คุณสามารถจัดระเบียบโปรโตคอล UART ได้ (จะใช้พินสองพินของไมโครคอนโทรลเลอร์) ซึ่งแพ็กเก็ตข้อมูลจะถูกส่งผ่านซึ่งมีทิศทางและความเร็วของการหมุนของมอเตอร์ตลอดจนสถานะทั่วไปของแพลตฟอร์ม... และคุณ ต้องคิดให้รอบคอบในการออกแบบเนื่องจากห้องเครื่องเรามีพื้นที่ไม่มากนัก... แม้ว่า ... ถ้าจะแฉและย้ายรีเลย์...
นั่นคือจุดสิ้นสุดของเรื่องราวอันยาวนานและบางครั้งก็น่าเบื่อของฉัน มีเพียง "ฮาร์ดแวร์" ซึ่งเป็นฮาร์ดแวร์แพลตฟอร์มเท่านั้นที่ได้รับการพัฒนา ผลิต และประกอบ งานชิ้นต่อไปคือซอฟต์แวร์ แต่ไม่ได้หมายความว่าในอนาคตคุณจะต้องทำงานเป็นโปรแกรมเมอร์เท่านั้น ในกระบวนการสร้างเฟิร์มแวร์สำหรับไมโครคอนโทรลเลอร์และแก้ไขข้อบกพร่องบางครั้งคุณต้องใช้มัลติมิเตอร์หรือแม้แต่ออสซิลโลสโคปและค้นหาว่าสัญญาณใดกำลังมาที่ไหนและในรูปแบบใด โดยปกติแล้ว ในช่วงเริ่มต้นของขั้นตอนนี้ ข้อผิดพลาดและการกำกับดูแลขั้นตอนการออกแบบ "ฮาร์ดแวร์" จะปรากฏในระดับที่มากขึ้น อุปกรณ์ของเราเรียบง่ายมาก ดังนั้นหากมีบางอย่างใช้งานไม่ได้ก็จะพบข้อผิดพลาดอย่างรวดเร็ว คุณลองจินตนาการดูว่าการทำงานกับวงจรที่ซับซ้อนจริงๆ เป็นอย่างไร ที่นั่นคุณจะต้องระมัดระวังและระมัดระวังมากขึ้น นอกจากนี้ยังจำเป็นต้องจัดระเบียบอินเทอร์เฟซการควบคุมผ่านบลูทู ธ ด้วยสมาร์ทโฟน - เพื่อสร้างโปรโตคอลบางประเภทสำหรับการโต้ตอบข้อมูลระหว่างหุ่นยนต์และโทรศัพท์ และพัฒนาซอฟต์แวร์ที่ทำให้ควบคุมหุ่นยนต์ได้สะดวกและสะดวก แต่นี่เป็นอีกเรื่องหนึ่งที่แยกจากกัน
เครื่องมือและอุปกรณ์บางอย่างที่ใช้
ปากกากาว BOSCHปืนกาว. ในคำศัพท์เฉพาะของ Bosch มันคือแท่งกาว โซลูชั่นมือถือที่ยอดเยี่ยม มันใช้แบตเตอรี่ 18650 ซึ่งหมายความว่าจะไม่มีปัญหาในการเปลี่ยนอีกในอนาคต และไม่มีอะไรอื่นที่จะพังได้ ให้ความร้อนอย่างรวดเร็ว (15 วินาที) และพร้อมใช้งานหลังจากปิดเครื่องจะหยุดทำงานเกือบจะในทันที - กาวไม่ไหลออกมาเหมือนในปืนร้อนละลายอื่น ๆ พบการประยุกต์ในชีวิตประจำวันและงานหัตถกรรม ข้อเสียอย่างเดียวคือแท่งกาวที่ไม่ธรรมดา: 7 มม. อุณหภูมิสูง 150...170C (แท่งกาว DREMEL GG01 และ GG03 เหมาะสำหรับแท่งกาว)

ยอดรวม 17718เครื่องมือปอกฉนวน (ผู้เปลื่อง) อะนาล็อกที่สมบูรณ์ของรุ่น KBT WS-04A ที่รู้จักกันดีซึ่งผู้ผลิตหลายรายขายแบบ 1-in-1

HT-202A.เครื่องมือสำหรับย้ำสายไฟพร้อมหน้าสัมผัสคอนเนคเตอร์ (ย้ำหางปลา)

โซโลมอน SL-30สถานีบัดกรีที่เชื่อถือได้ หัวแร้งจ่ายแรงดันไฟฟ้า 24V. ปลายชุบนิกเกิล ควบคุมอุณหภูมิได้อย่างแม่นยำ

ไซค์ 8858.อาคาองค์ประกอบ 8032 อาคายี่หัว 8858 อาคา ZHaoxin 858DH รุ่นเหล่านี้มีความแตกต่างกัน แต่การออกแบบ เครื่องทำความร้อน และอุปกรณ์อิเล็กทรอนิกส์จะเหมือนกัน ปืนบัดกรีที่ดี สะดวก ราคาถูกและกะทัดรัดจริงๆ ซื้อบนเว็บไซต์นำเข้าพร้อมการดัดแปลงในภายหลังจากผลิตภัณฑ์จีนราคาถูก: สลัดเศษโลหะ (!) ออกไป, ล้างฟลักซ์, บัดกรีหน้าสัมผัสบนบอร์ด, power triac วางอยู่บน KPT8 จนถึงตอนนี้ฉันดีใจมากที่ไดร์เป่าผมเป่าได้เหมือนไดร์เป่าผม อุณหภูมิและความเร็วลมสามารถปรับได้ โดยหลักการแล้วเครื่องเป่าผมนั้นคุ้มค่าเงิน นี่เป็นการซื้อที่ค่อนข้างใหม่และสถิติความน่าเชื่อถือยังไม่ชัดเจน แต่ฉันสงสัยว่ามันจะเหมาะกับการทำงานไม่บ่อยนัก

เมตาโบ BZ 12SP.ไขควงเก่ามาก. ความหายาก. พวกนี้คงไม่มีขายแล้ว ช่วยให้คุณทำงานที่ค่อนข้างละเอียดอ่อนได้ด้วยการจัดตำแหน่งที่ดีและไม่มีการคลายตัวของสปินเดิล

เวลเลแมน VTHD02.สว่านขนาดเล็ก หรือที่พวกเขาเรียกกันว่า Dremel (แม้ว่าจะไม่ถูกต้องพอ ๆ กับการเรียกเครื่องถ่ายเอกสารก็ตาม) กาลครั้งหนึ่งฉันซื้อชุดเพื่อส่งเสริมการขายฉันชอบชุดที่แนบมามากกว่าสว่านเอง อย่างไรก็ตาม เธอค่อนข้างจะเก่งด้วยการปรับเปลี่ยนโภชนาการบางอย่าง มันใช้งานได้จากแหล่งจ่ายไฟดั้งเดิม แต่ภายใต้ภาระมันเป็นเรื่องยาก แน่นอนว่าเมื่อประมาณสองปีที่แล้วมีการผลิตแหล่งจ่ายไฟเคลื่อนที่จากช่องสำหรับแบตเตอรี่ 18650 สี่ก้อนที่มีเอาต์พุตแบบปรับได้เพียงชั่วคราวเท่านั้น minidrill กลายเป็นระบบอัตโนมัติ ด้วยโภชนาการนี้ สว่านขนาดเล็กเริ่มรู้สึกดีขึ้นมากและกลายเป็นอุปกรณ์ที่มีประโยชน์มากในฟาร์ม


โนเบิล NB4000P-4.มัลติมิเตอร์ สะดวกเพราะสายไฟถูกดึงกลับเข้าไปด้านในจนสุด ได้มาในช่วงปีการศึกษาที่ยากลำบาก นั่นก็คือเมื่อนานมาแล้ว สายไฟขาดไปนานแล้ว - เราต้อง "ทำงาน" จากมัลติมิเตอร์ตัวอื่นที่ล้มเหลว ตอนนี้สายไฟหยุดถอดแล้ว แบตเตอรี่และฟิวส์มีการเปลี่ยนแปลงหลายครั้ง มันยังคงใช้งานได้ - ความน่าเชื่อถือที่น่าทึ่งพร้อมความแม่นยำปานกลาง

ฟลุ๊ค 179.มัลติมิเตอร์ความแม่นยำสูง เครื่องมือคุณภาพสูง สะดวก และที่สำคัญที่สุดคือแม่นยำ

รับมาเป็นโฆษณาอะไรสักอย่าง แม้ว่า... ทำไมจะไม่ได้ - แล้วค่าคอมมิชชั่นของฉันอยู่ที่ไหนล่ะ? เครื่องมือทั้งหมดนี้จัดทำขึ้นเพื่อเป็นข้อมูลทั่วไป ตัวอย่างเช่น ครั้งหนึ่ง ฉันค้นพบนักเต้นระบำเปลื้องผ้าที่เปลี่ยนกระบวนการปอกสายไฟจากงานบ้านให้เป็นความสุข และฉันไม่เสียใจที่ซื้อ BOSCH GluePen เลย บางทีการเลือกเล็กน้อยนี้อาจช่วยใครบางคนได้
ในการประกอบหุ่นยนต์ของคุณ ไม่จำเป็นเลยที่จะต้องมีเครื่องมือที่หลากหลายและมีราคาแพง แม้ว่าจะช่วยปรับปรุงคุณภาพของงานได้อย่างแน่นอนและนำมาซึ่งความพึงพอใจมากขึ้นก็ตาม ก็เพียงพอแล้วที่จะมีหัวแร้งธรรมดา ไขควงหลายตัว และสว่าน ท้ายที่สุดแล้ว กาลครั้งหนึ่ง ผู้เขียนบทความนี้เมื่อนานมาแล้วมีเพียงคีม ค้อน ไขควงสองสามตัว ลวดทองแดง เหล็กพยุง (ยังมีที่ไหนสักแห่ง!) และสว่านสองชิ้น ทั้งสายโทรศัพท์และเทปพันสายไฟสีน้ำเงินจำนวนมาก (สมัยก่อนใช้กันบ่อย) ก็เพียงพอแล้วที่จะสร้างรถยนต์ธรรมดาๆ ที่เมื่อกดปุ่มก็จะขับตรงไปเอง
องค์ประกอบหลัก
เนื่องจากการร้องขอจำนวนมากจากผู้อ่าน ฉันจึงจัดทำลิงก์ (ebay/aliexpress) ไปยังส่วนประกอบหลัก ลิงค์การทำงาน ณ เดือนกันยายน 2559 ฉันสั่งทุกอย่างเมื่อหกเดือนที่แล้ว (กุมภาพันธ์-มีนาคม 2559) ดังนั้นฉันขอแนะนำให้ดูเพิ่มเติม - บางทีตอนนี้คุณสามารถซื้อได้ในราคาที่ดีกว่าแล้ว
แชสซี เครื่องยนต์ ล้อ ตัวยึด - แท่น (เลือกได้ 2 สี) + 4 * (ล้อ 80 มม. + ตัวยึด + เครื่องยนต์ (เลือกได้ 3 ระดับ)
โปรดใส่ใจกับชุดอุปกรณ์ต่อไปนี้ - ล้อ 130 มม. + ตัวยึด + มอเตอร์พร้อมเซ็นเซอร์ Hall
ให้ความสนใจกับแบตเตอรี่ที่มีความจุ (ฉันเคยทำงานกับพวกเขาหลายครั้ง - ความจุจริงและที่ประกาศของแบตเตอรี่เหล่านี้มักจะตรงกันนั่นคือจริงๆ แล้วมี 3400 mAh!) - Panasonic NCR18650B 18650 / 3400 mAh / 3.7V / โมดูล Bluetooth ที่ไม่มีการป้องกัน HC- 06 5
0.9% มันแย่มาก - วัฒนธรรมการพูดอยู่ที่ไหน การสร้างประโยคตามปกติ... ผู้เขียนจำเป็นต้องเรียนรู้ไวยากรณ์และสัณฐานวิทยา! 2
5.9% ฉันคิดว่ามันยากที่จะตอบหรือฉันจะอธิบายในความคิดเห็น 12




