Как рассчитать пусковой ток. Пусковые токи двигателей скважинных насосов
При пуске в ход, то есть при трогании с места и разгоне, момент, развиваемый двигателем, должен превышать момент сопротивления нагрузки, иначе двигатель не сможет разогнаться. В начальный момент пуска, когда скорость двигателя равна нулю, а скольжение – единице, ЭДС в обмотке ротора максимальна (см. 2.37), а пусковой ток в обмотке статора I 2 , в соответствии с (2.40), значительно превышает номинальный рабочий ток. Соответственно возрастает и ток в обмотке статора, то есть ток, потребляемый двигателем от питающей сети. Кратность пускового тока y п = I П /I НОМ для двигателей с короткозамкнутым ротором достигает 5 – 7. По мере разгона двигателя скольжение уменьшается, что приводит к уменьшению ЭДС и силы тока в обмотке ротора. Соответственно уменьшается и ток в обмотке статора.
Большой пусковой ток может быть недопустимым, как для самого двигателя, так и для сети, питающей двигатель. Если пуски осуществляются часто, то большой пусковой ток приводит к повышению температуры обмоток двигателя, что может привести к преждевременному старению его изоляции. Если после подачи напряжения на двигатель, он по какой - либо причине не запустился, двигатель должен быть немедленно отключен, автоматическим устройством защиты, срабатывающим при повышенном токе, или вручную. В питающей сети при большой силе тока снижается напряжение, что влияет на работу других потребителей, подключенных к сети. Поэтому прямой пуск двигателя непосредственным включением в питающую сеть допускается лишь в том случае, когда мощность двигателя, намного меньше мощности, на которую рассчитана сеть питания.
У двигателей с фазным ротором снижение пускового тока достигается включением в цепь ротора трехфазного пускового реостата. Активные сопротивления, включенные в цепь каждой фазы ротора, обеспечивают уменьшение тока в обмотке ротора, а значит и в обмотке статора. При этом увеличение активного сопротивления в цепи ротора обеспечивает увеличение коэффициента мощности cosψ 2 , и получение достаточно большого пускового момента при уменьшенном пусковом токе. По мере увеличения скорости вращения двигателя сопротивление пускового реостата плавно или ступенчато уменьшается до нуля.
Уменьшить пусковой ток асинхронного двигателя с короткозамкнутым ротором можно путем пуска при пониженном напряжении питания. Возможно также включение на время пуска по схеме звезда, статорной обмотки рассчитанной на соединение в треугольник. Однако при этих способах существенно снижается вращающий момент и они применимы лишь при пуске без нагрузки или при малой нагрузке. Уменьшение пускового тока при сохранении большого вращающего момента путем пуска при пониженной частоте напряжения питания.
Для механизмов, имеющих тяжелые условия пуска, в которых желательно использовать асинхронный двигатель с короткозамкнутым ротором, целесообразно применять двигатели с улучшенными пусковыми свойствами: c большим пусковым моментом и меньшим, чем у двигателей общего назначения, пусковым током. Такими являются двигатели с двухклеточным и глубокопазным ротором. Форма пазов и активных проводников обмотки якоря двухклеточного и глубокопазного ротора показаны на рис. 2.30
Ротор двухклеточного двигателя имеет две короткозамкнутые обмотки: внешнюю 1 (рис. 2.30а.), или пусковую, выполненную стержнями с малым поперечным сечением из материала с пониженной электропроводностью (латуни, бронзы) и внутреннюю 2, или рабочую – выполненную стержнями с большим поперечным сечением из материала с высокой электропроводностью (меди). В начале пуска двигателя (при n = 0, s = 1) частота тока в роторе равна частоте сети. При этом индуктивные сопротивления клеток велики по сравнению с активными (X L = 2πfL). Особенно велико индуктивное сопротивление нижней, рабочей, клетки, глубоко погруженной в тело ротора и сцепленной с большим потоком рассеяния (показан пунктирными линиями на рис. 2.30). Ток проходит в основном по верхней клетке с большим активным сопротивлением благодаря чему уменьшается пусковой ток и увеличивается пусковой момент. По мере разгона двигателя частота тока ротора уменьшается в десятки раз, так как скольжение уменьшается от единицы до сотых долей ее. Следовательно индуктивное сопротивление ротора, пропорциональное частоте, уменьшается и становится незначительным и для пусковой и для рабочей обмотки. При этом ток ротора, распределяющийся между клетками обратно пропорционально их сопротивлениям, начинает протекать в основном в рабочей обмотке с малым активным сопротивлением. Таким образом, процесс пуска двухклеточного двигателя сходен с процессом реостатного пуска двигателя с фазным ротором.
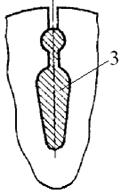
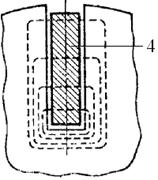
Рисунок 2.30 – Формы пазов двухклеточного и глубокопазного ротора
Имеются и другие конструкции ротора с двойной клеткой, например с фигурными пазами 3 залитыми алюминием (рис. 2.30б). Здесь повышенное активное сопротивление клетки при пуске обеспечивается только за счет вытеснения тока в верхние части проводников, так как материал обеих клеток одинаков. Такая конструкция проще и дешевле, но пусковые характеристики двигателя несколько хуже.
Аналогично вытеснение тока в верхнюю часть проводника при пуске, когда частота тока в роторе велика, обеспечивается в глубокопазном роторе (рис. 2.30в), в котором проводник 4, обычно медный сильно вытянут по высоте. Вытеснение тока в верхнюю часть проводника равноценно уменьшению его сечения и обеспечивает увеличение активного сопротивления ротора во время пуска и уменьшение пускового тока.
Всем кто сталкивался с пуском электродвигателей, знакомо выражение, пусковой ток электродвигателя. При запуске пусковой ток электродвигателя, в зависимости от мощности и номинальных оборотов, может составлять от 2 до 8 кратного значения.
Все это негативно сказывается на работе других потребителей работающих в одной линии с данным оборудованием. При таких пусках, которые характеризуются высоким уровнем потребления реактивной мощности за короткий период времени, другие электродвигатели и те потребители, для которых показатель стабильности напряжения имеет приоритетное значение, находятся в дискомфортном состоянии. Такая ситуация приводит к непредсказуемым последствиям в работе данного электрооборудования. Ведь каждый такой пуск резко понижает напряжение питающей сети. Для того чтобы снизить негативные воздействия таких процессов используются несколько традиционных методов для того чтобы снизить
1. Пуск электродвигателя производят после снятия механических нагрузок на приводной вал электродвигателя, так называемый холостой запуск. Затем нагружают электродвигатель, постепенно выводя его на рабочий режим. Такой метод применим для работы насосов и вентиляционных систем, где есть возможность регулировать нагрузку на электродвигатель при помощи расходных и всасывающих запорных элементов. Этим снижается величина реактивной мощности, а значит и пускового тока электродвигателя.
2.Включение электродвигателя по схеме звезда → треугольник. Данный метод применим при определенном условии. Двигатель должен иметь обмотку на необходимый диапазон напряжений. Для нашей промышленной сети этот диапазон составляет 380/660В. Если это условие соблюдено, запуск электродвигателя производится в мягком режиме, при котором пусковые токи не превышают номинальные более чем в 2 раза.
3. Автотрансформаторный запуск. Пуск таким образом, чем–то напоминает предыдущее действие, только подача напряжения на запускаемый электродвигатель, производится плавной подачей напряжения через автотрансформатор.
Данный вид запуска практически не применяется в виду его высокой стоимости и значительных габаритов пускорегулирующей аппаратуры.
4. Применение пусковых резисторов или реакторов для ограничения пусковых токов. Где ток, превышающий некоторое заданное значение, выделяется в виде тепловой энергии на гасящих резисторах.
5. Частотные регуляторы. Новое направление в решении пуска и возможности снизить . Данный метод повсеместно внедряется везде, где надо и не надо. Этот метод пуска не требует значительных вложений финансовых средств, если это касается электродвигателей небольшой мощности 10–30 КВт. При оборудовании электродвигателей большей мощности такими устройствами их стоимость может значительно превышать стоимость самого электродвигателя.
6.Устроойство плавного пуска на основе современных твердотельных электронных элементов – тиристоров, управление таких пусковых устройств осуществляется методом фазового управления. Но у этого метода есть один существенный недостаток, в сетях недостаточной мощности провалы напряжения компенсировать не удается. Такое устройство подвержено критическим режимам работы в данном режиме и выход его из строя дело времени.
В решении данной проблемы, потребитель должен найти приемлемое решение, для эффективного и безопасного запуска мощных электродвигателей и снизить
Нет похожих записей
Ограничение пусковых токов асинхронных
При включении асинхронного двигателя в сеть возникает большой пусковой ток, превышающий номинальный в 5…
7 раз и вызывающий в линии значительное падение напряжения, что может привести к остановке рядом работающих двигателей. Под действием пускового тока в двигателе возникают динамические усилия, повреждающие и разрушающие обмотку, нагружаются силовые трансформаторы и линия, что приводит и дополнительным потерям мощности ‚ ограничение пусковых токов особенно актуально для сельскохозяйственных установок из-за удаленности электродвигателей от источников питания и соизмеримости мощности трансформаторов и пусковой мощности электродвигателей. Частые пуски нагревают обмотки двигателя.
Ограничить пусковые токи можно несколькими способами: включением добавочного активного или индуктивного сопротивления в цепь статора; включением добавочного активного или индуктивного сопротивления в цепь ротора; переключением обмотки статора на период пуска с «треугольника» на «звезду»; понижением напряжения на статоре. Схемы снижения пусковых токов путем переключения обмоток со «звезды» на «треугольник» (рис.4.21) можно рекомендовать для электродвигателей, фазные обмотки которых рассчитаны на линейное напряжение. Это относится к электроприводам прессгрануляторов, мощных дробилок и т.п.). В сети с напряжением 380 В необходимо применять двигатели рассчитанные на напряжение 660/380 В. При напряжении сети 380 Ву двигателя должно быть напряжение 380/220 В.
Рассмотрим соотношение пусковых токов двигателя при соединении в «звезду»:
(4.73)
где - полное сопротивление обмотки статора при включении. 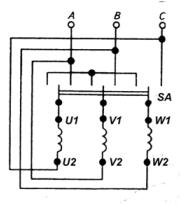
Рис. 4.21. Схема переключения обмоток статора асинхронного
двигателя со «звезды» на «треугольник».
Пусковые токи двигателя при включении обмоток в «треугольник»: ![]()
Отношение токов:  (4.74)
(4.74)
Таким образом, при включении обмоток двигателя в «звезду» фазныйток уменьшается в раз, а линейный - в три раза. При понижении напряжения на фазе в раз момент двигателя уменьшается в три раза.
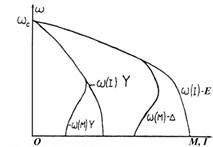
Рис.4.22. Характеристики асинхронного двигателя при
переключении обмоток статора со «звезды» на «треугольник».
Механические и электромеханические характеристики при пуске двигателя этим способом приведены на рис.4.22. Пусковые токи асинхронных двигателей можно ограничить понижением напряжения на статоре.
Пусковой ток асинхронного двигателя при номинальном напряжении питания равен:
где - сопротивление фазы двигателя в момент включения.
Для снижения пускового тока в а раз напряжение на статоре асинхронного двигателя необходимо снизить в это же число раз
(4.75)
Уменьшение напряжения на статоре вызывает снижение пускового момента двигателя в или (1 - . На рис.4.23 изображены механические и электромеханические характеристики асинхронного двигателя при снижении пускового тока а два раза. Значительное уменьшение пусковых моментов позволяет использовать данный способ в основном при пуске двигателей на холостом ходу с небольшим относительно , моментом трогания.
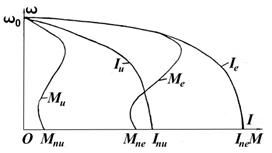
Рис.4.23. Характеристики асинхронного двигателя при понижении
напряжения.
В расчетах при выборе двигателя обязательна проверка на возможность пуска при понижении напряжения: .
Ограничить пусковые токи асинхронных двигателей можно включением добавочного активного или индуктивного сопротивления в цепь статора .
Расчет значения добавочного активного или индуктивного сопротивления начинают с выбора необходимого пускового тока и определения кратности снижения этого тока:
,
где - пусковой ток двигателя при отсутствии сопротивления в
цепи статора,=
номинальное фазное напряжение сети; сопротивление обмотки фазы статора; - пусковой ток при введении добавочного сопротивления в цепь статора,  - полное сопротивление цепи обмотки статора при введении или
- полное сопротивление цепи обмотки статора при введении или
Подставим значения токов и
a =  .
.
Для определения необходимого значения cтроят треугольник сопротивлений (рис.4.24).
Рассчитываем полное сопротивление обмотки двигателя:
Затем активное сопротивление
,
где - коэффициент мощности двигателя при пуске; 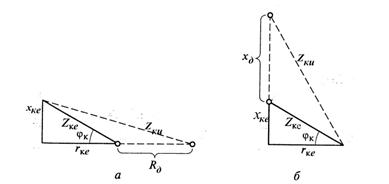
Рис.4.24. Треугольники пусковых сопротивлений при включении в цепь статора асинхронного двигателя: а – активного сопротивления;
б – индуктивного сопротивления.
индуктивное сопротивление ![]()
Из треугольника сопротивлений (рис.4.25, а) имеем
(4.76)
Аналогично определяем значение добавочного индуктивного
сопротивления (рис.4.24, б): ![]() (4.77)
(4.77)
Механические и электромеханические характеристики двигателя при введении добавочных сопротивлений рассмотрены ранее.
Пусковая диаграмма двигателя приведена на рис.4.25. Сопротивление или отключают после разгона двигателя или в какой то момент времени, при котором скачок тока не превышает .
Ограничение пусковых токов асинхронных двигателей возможно и включением добавочных резисторов в цепь ротора . При пуске асинхронного двигателя с фазным ротором с замкнутыми накоротко кольцами пусковой момент равен (0,5... 1,5), а ток статора и ротора превосходит номинальный в 5... 10 раз.
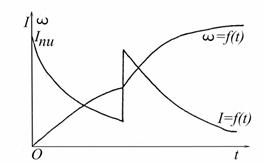
Рис.4.25. Диаграммы тока пуска асинхронного двигателя с
помощью резистора в цепи статора.
Введение в цепь ротора активных сопротивлений снижает токи двигателя и увеличивает пусковой момент до (см. рис.4.7). Схемы включения ступеней пусковых резисторов приведены на рис.4.2, 6.
Рис. 4.26. Схемы включения пусковых резисторов асинхронного
двигателя.
4.11. Расчет пусковых резисторов для асинхронных двигателей
Расчеты пусковых резисторов для асинхронных двигателей с фазным ротором аналогичны расчетам пусковых резисторов для шунтовых и сериесных двигателей . При этом необходимо учесть, что на рабочей части механической характеристики асинхронного двигателя момент пропорционален току, поэтому расчеты ведут для моментов, а не для тока . Значение максимального пускового момента ограничивается динамическими усилиями в обмотках и нагревом машины. В некоторых случаях этот момент ограничивается требованиями технологии. Расчет сопротивлений пусковых резисторов можно выполнить точными и приближенными методами аналитическим и графическим методом. Рассмотрим приближенный метод, который применяют при максимальных моментах переключения, не превышающих 0,7 Диаграмма пуска асинхронного двигателя в две ступени приведена на рис.4.28.
Аналитический метод. Если число ступеней m задано, то
кратность моментов переключения ![]() (4.78)
(4.78)
где - максимальное сопротивление роторной цепи в момент включения, ![]() ; масштаб сопротивления
; масштаб сопротивления
Рис.4.28. Пусковая диаграмма асинхронного двигателя.  , - сопротивление ротора, аb
, - сопротивление ротора, аb
После подстановки значений и  (4.79)
(4.79)
Отрезок ab = , а размер отрезка определим из подобных
треугольников Oad и ofl:
аd/ao = lf/of;
отрезки аО = ; lf = 1; jf = , следовательно:
аd
= ао lf/of =
 ; .
; .
Таким образом,
Значение должно быть больше , т.е. . По аналогии с машинами постоянного тока (глава 2 и 3)
определим сопротивление:
(4.80)
Когда число ступеней не задано, принимаем значения моментов переключения и , затем определяем и число ступеней m:
(4.81)
(4.82)
где , - номинальные значения ЭДС и тока ротора.
Для проверки, необходимо определить сопротивление ротора и сравнить его с полученным графическим методом ![]() (4.83)
(4.83)
4.12. Электроприводы с линейными электродвигателями
В настоящее время около 40-50% серийных электродвигателей эксплуатируется в производственных механизмах с поступательным или возвратно-поступательным движением рабочего органа. Для преобразования вращательного движения в поступательное используются разнообразные устройства: пневмо- и гидропередача, пара «винт - гайка»; кривошипно-шатунный механизм, шестерня и рейка, колесо и путевая структура в транспортных системах и др. Кроме того, в таких приводах, как правило, используются редукторы, являющиеся местом дополнительных потерь и отказов.
Линейные электродвигатели позволяют непосредственно осуществить поступательное движение без механического контакта между первичной (обычно статором) и вторичной (ротором) структурами, следовательно, исключить передаточный механизм. При этом значительно упрощается кинематическая схема, повышается надежность, точность управления, а сами линейные электродвигатели хорошо пристраиваются к исполнительному механизму, обладают технологичностью в производстве и меньшим расходом стали благодаря малоотходному раскрою.
На практике применяются линейные двигатели постоянного тока (в основном - шаговые), асинхронные (ЛАД), синхронные (ЛСД) и электромагнитные (ЛЭМД). Получают распространение линейные асинхронные двигатели в силу их конструктивной простоты, дешевизны, технологичности изготовления, надежности, разнообразия конструктивных решений. Конструктивно ЛАД выполняют цилиндрическими и плоскими.
На рис.4.29 показано устройство плоского ЛАД.
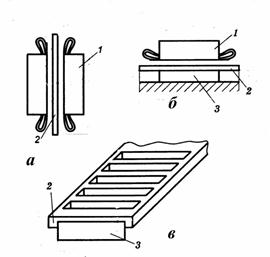
Рис.4.29. Устройство плоских линейных асинхронных двигателей:
1-индуктор с обмоткой (статор); 2- реактивная шина; 3- обратный магнитопровод; а – двухсторонний ЛАД; б – односторонний ЛАД; в – короткозамкнутая обмотка с обратным магнитопроводом.
Управление параметрами движения ЛАД осуществляют так же, как и обычным АД: изменением сопротивления реактивной шины, регулированием частоты и длительности включений. ЛАД применяются в конвейрах, ворошителях бункеров-питателей сыпучих грузов, транспортных средствах, ручном инструменте и т.п. Важным преимуществом ЛАД состоит в высоком значении .
В большинстве случаев асинхронные двигатели включаются прямым включением в сеть. В статорной цепи двигателя замыкаются контакты электромагнитного пускателя, обмотки подключаются к линейному напряжению сети, возникает вращающееся электромагнитное поле, и привод начинает работать.
Конечно, при этом происходит пусковой бросок тока, превышающий номинальное значение в пять-семь раз. И длительность этого броска зависит от продолжительности пуска, то есть от мощности двигателя. Чем больше двигатель, тем большее время требуется ему для разгона и тем длительнее будет воздействие повышенного тока на питающую сеть и статорную обмотку.
Для “слабых” асинхронных электроприводов мощностью не более 3 кВт указанные недостатки прямого включения в сеть не являются критичными. Конечно, имеющим место броском тока нельзя пренебрегать, но даже бытовая сеть переменного тока обычно обладает некоторым резервом по мощности, позволяющим выдержать моментную перегрузку.
Что же касается самого приводного двигателя, то при отсутствии “просадок” напряжения он всегда запустится безо всяких для себя последствий. Поэтому, прямое включение в сеть часто применяется для асинхронных приводов небольших насосных и вентиляторных установок, циркулярных пил, наждаков, металлообрабатывающих станков.
Пуск этих приводов происходит в относительно благоприятных условиях, а двигатели рассчитываются на постоянную работу при соединении статорных обмоток в «звезду» и линейном напряжении 380 вольт (номинальное напряжение 380/220 вольт).
Но когда мощность двигателя исчисляется десятью, 15-ю и более киловаттами, прямое включение в сеть становится просто неприемлемым. Тогда броски пускового тока необходимо ограничивать, поскольку они создают лишнюю нагрузку на сеть и могут вызвать “просадку” напряжения.
Самый популярный способ ограничения пускового тока асинхронного привода – это пуск при пониженном напряжении. Для двигателей 660/380 вольт такой пуск технически можно реализовать переключением обмоток со «звезды» на «треугольник» . В «звезде» двигатель потребляет меньший ток, и нагрузка на сеть уменьшается.
Переключение на «треугольник» через несколько секунд после пуска можно организовать при помощи реле времени, или контролируя ток в статорной цепи. Однако, существует одна проблема – при снижении напряжения питания снижается и момент двигателя на валу.
Причем если напряжение было снижено в два раза, то момент понижается в четыре раза – зависимость квадратичная. И это при том, что пусковой момент асинхронных двигателей и без того ограничен в силу особенностей асинхронной механической характеристики.
Поэтому, понижение напряжения и переключение со «звезды» на «треугольник» применяется только в электроприводах, имеющих технологическую возможность запускаться при полном отсутствии нагрузки на валу. Это актуально для гонных двигателей преобразовательных агрегатов, для приводов мощных многопильных станков и тому подобных приводов.
Пуск при пониженном напряжении совсем не подходит, например, для привода ленточного конвейера, который практически всегда вынужден запускаться в нагруженном состоянии. Для таких приводов применяется реостатный пуск , также позволяющий ограничить пусковой ток двигателя, но без снижения крутящего момента.
Для реостатного пуска применяются двигатели с фазным ротором, позволяющим включить дополнительные сопротивления в свою цепь. Сопротивления можно выводить и по ступеням, при этом пуск получится более плавным. Реостатное регулирование часто применяют и для изменения скорости привода во время работы.
Но самым эффективным для асинхронного привода является пуск с использованием частотного преобразователя (ПЧ). Изменяя частоту и величину питающего напряжения, преобразователь позволяет асинхронному двигателю запускаться и работать с оптимальными показателями в составе любого привода. При этом совершенно исключаются броски тока, а крутящий момент достигает максимально возможных значений.
В данной статье будет рассматриваться изменение напряжения (потеря напряжения) при пуске асинхронного двигателя с короткозамкнутым ротором (далее двигатель) и его влияние на изменения напряжения на зажимах других электроприемников.
При включении двигателя пусковой ток может превышать номинальный в 5-7 раз, из-за чего включение крупных двигателей существенно влияет на работу присоединенных к сети приемников.
Это объясняется тем, что пусковой ток вызывает значительное увеличение потерь напряжения в сети, вследствие чего напряжение на зажимах приемников дополнительно снижается. Это отчетливо видно по лампам накаливания, когда резко снижается световой поток (мигание света). Работающие двигатели в это время замедляют ход и при некоторых условиях могут вообще остановиться.
Кроме того, может случиться, что сам пускаемый двигатель из-за сильной просадки напряжения не сможет развернуть присоединенный к нему механизм.
Режим пуска двигателя рассматривается при максимальной нагрузке линии, так как именно при таких условиях создаются наиболее неблагоприятные условия для работы присоединенных к сети приемников.
Чтобы проверить можно ли включать двигатель, нужно рассчитать напряжение на его зажимах во время пуска и напряжение на любом другом работающем двигателе, а также проверить напряжение у ламп.
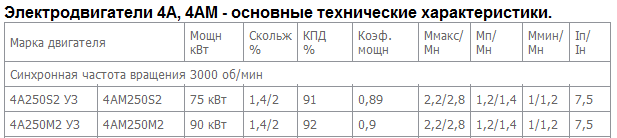
Пример возможности пуска электродвигателя 380 В
Требуется проверить возможность пуска электродвигателя типа 4А250М2 У3 мощностью 90 кВт. От шин 6 кВ подстанции 2РП-1 питается подстанция с трансформаторами типа ТМ мощностью 320 кВА. От подстанции 2РП-1 до трансформаторов ТМ-6/0,4 кВ с установленным ответвлением 0%, проложен кабель марки ААБ сечением 3х70 мм2, длина линии составляет 850 м. К шинам РУ-0,4 кВ присоединен кабелем марки ААБ сечением 3х95 мм2, длиной 80 м двигатель типа 4А250М2 У3.
Рис. 1 - Однолинейная схема 0,4 кВ
В момент пуска двигателя 4А250М2 У3 работает подключенный к шинам двигатель 4А250S2 У3 мощностью 75 кВт с напряжением на зажимах 365 В. Напряжение на шинах 0,4 кВ при пуске двигателя равно Uш = 380 В.
- Ммакс/Мн – кратность максимального момента;
- Мп/Мн – кратность пускового момента;
- Мн – номинальный момент двигателя;
Расчет:
Где:
Kпуск = 7,5 – кратность пускового тока, согласно паспорта на двигатель;
3. Определяем величину активного и индуктивного сопротивления для алюминиевого кабеля марки ААБ сечением 3х70 мм2 на напряжение 6 кВ от шин подстанции 2РП-1 до трансформатора типа ТМ 320 кВА, значения сопротивлений берем из таблицы 2.5 [Л2.с 48].
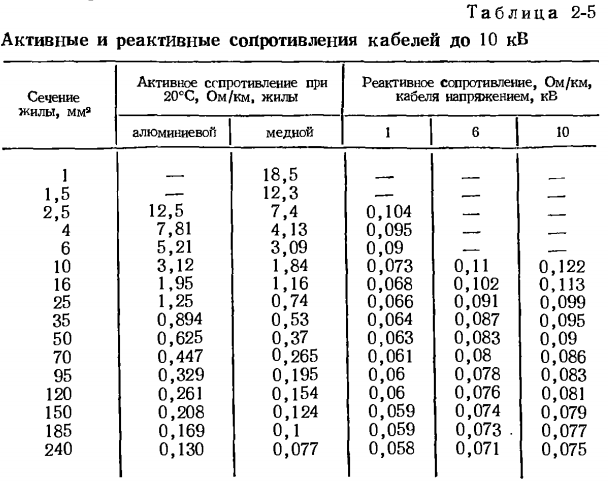
Получаем значения сопротивлений Rв = 0,447 Ом/км и Хв = 0,08 Ом/км.
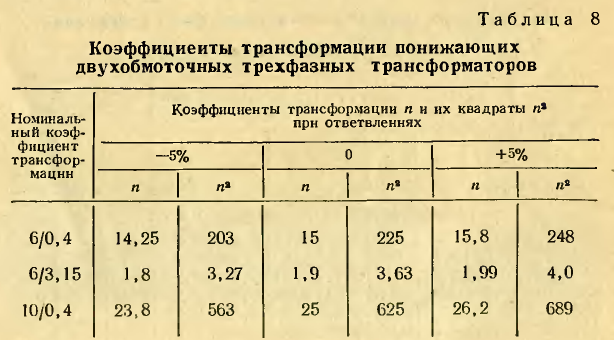
Эти сопротивления необходимо привести к стороне низшего напряжения трансформатора, так как двигатель подключен к сети низшего напряжения. Из таблицы 8 [Л1, с 93] для номинального коэффициента трансформации 6/0,4 кВ и ответвления 0% находим значение n=15.
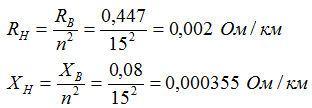
4. Определяем активное и индуктивное сопротивление кабеля по отношению к сети низшего напряжения по формуле [Л1, с 13]:
Где:
Rв и Хв – сопротивления сети со стороны высшего напряжения;
n = 6/0,4 =15 – коэффициент трансформации понижающего трансформатора.
5. Определяем сопротивление кабеля длиной 850 м от подстанции 2РП-1 до трансформатора 6/0,4 кВ:
Rс = Rн*L = 0,002*0,85 = 0,0017 Ом;
Хс = Хн*L = 0,000355*0,85 = 0,0003 Ом;
6. Определяем сопротивление трансформатора мощностью 320 кВА, 6/0,4 кВ по таблице 7 [Л1, с 92,93].
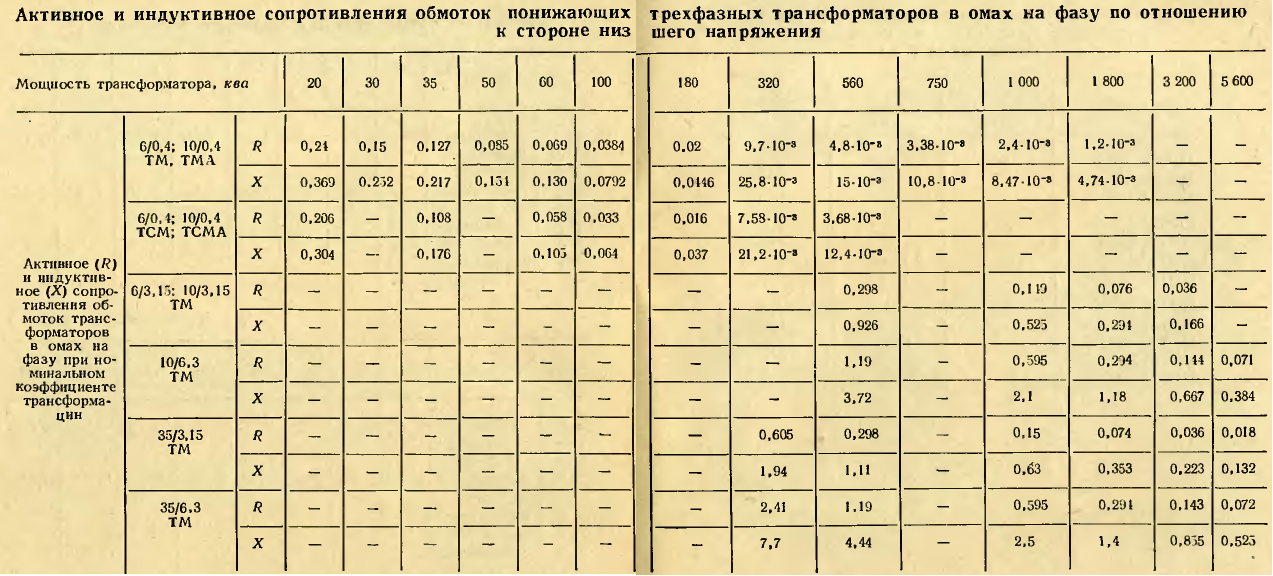
Rт = 9,7*10 -3 = 0,0097 Ом;
Хт = 25,8*10 -3 = 0,0258 Ом;
7. Определяем сопротивления линии от шин подстанции 2РП-1 до шин низшего напряжения подстанции:
Rш = Rс + Rт = 0,0017 + 0,0097 = 0,0114 Ом;
Хш = Хс + Хт = 0,0003 + 0,0258 = 0,0261 Ом;
8. Определяем сопротивление кабеля длиной 80 м марки ААБ 3х95 мм2 от шин низшего напряжения до зажимов двигателя:
R 1 = R 0 *L = 0,329*0,08 = 0,026 Ом;
Х 1 = Х 0 *L = 0,06*0,08 = 0,0048 Ом;
Где:
R 0 = 0,329 Ом/км и Х 0 = 0,06 Ом/км -значения активных и реактивных сопротивлений кабеля определяем по таблице 2-5 [Л2.с 48].
9. Определяем суммарное сопротивление линии от подстанции 2РП-1 до зажимов двигателя:
Rд = Rш + R1 = 0,0114 + 0,026 = 0,0374 Ом;
Хд = Хш + Х1 = 0,0261 + 0,0048 = 0,0309 Ом;
Если выполняется отношение Rд/ Хд = 0,0374/0,0309 = 1,21 < 2,5. Таким образом, относительная величина ошибки при определении потери напряжения в сети от пускового тока двигателя не превышает 5%.
10. Определяем коэффициент Ад по формуле [Л1, с 14]:
Где:
cosφ = 0,3 и sinφ = 0,95 средние значения коэффициентов мощности при пуске двигателя, принимаются при отсутствии технических данных, согласно [Л1. с. 16].
11. Определяем напряжение на зажимах двигателя Д1 по формуле [Л1, с 14]:
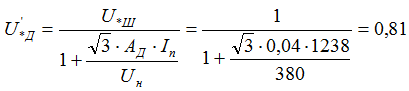
Где:
U*ш = Uш/Uн = 380/380 =1 – относительное напряжение на шинах распределительного пункта, во многих случаях его можно принять равным 1;
Iп – пусковой ток двигателя;
12. Проверяем сможет ли двигатель Д1 развернуть присоединяемый механизм нанос центробежный 1Д315-71а:
Где:
m п =Мпуск/Мном = 1,2 – кратность пускового момента электродвигателя при номинальном напряжении на его клеммах (выбирается по каталогу на двигатель);
12.1 Коэффициент загрузки определяем как отношение номинальной мощности, необходимой для нормальной работы механизма в данном случае нанос центробежный 1Д315-71а Рн.мех. = 80 кВт, к номинальной мощности двигателя 90 кВт:
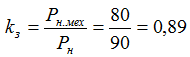
Как мы видим условие выполняется и двигатель при пуске сможет развернуть присоединенный к нему центробежный насос в нормальных условиях без перегрева своих обмоток выше температуры, допустимой по нормам.
13. Определяем влияние пуска двигателя Д1 на работу присоединенного к шинам 0,4 кВ двигателя Д2 типа 4А250S2 У3, найдем величину колебания напряжения на шинах 0,4 кВ по формуле:
13.1 Определяем коэффициент Аш по формуле:
14. В момент пуска двигателя Д1 на зажимах работающего двигателя Д2 относительное напряжение согласно [Л1, с15] уменьшиться на величину колебания напряжения δU*Ш, откуда получаем:
Где:
U *Д2 = U Д2 /Uн = 365/380 = 0,96 – относительное напряжение на зажимах двигателя Д2 до пуска двигателя Д1.
Где:
m п = Ммакс/Мн = 2,2 – кратность максимального момента (выбирается по каталогу на двигатель);
m п.мех - требуемая кратность пускового момента приводимого механизма, выбирается по таблице 4 [Л1, с 88], для центробежного насоса равно 0,3;
15.1 Коэффициент загрузки определяем как отношение номинальной мощности, необходимой для нормальной работы механизма в данном случае нанос центробежный 1Д200-90а Рн.мех. = 72 кВт, к номинальной мощности двигателя 75 кВт:
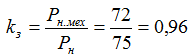
Как мы видим, устойчивость работы двигателя Д2 типа 1Д200-90а обеспечивается с большим запасом.
Литература:
1. Как проверить возможность подключения к электрической сети двигателей с короткозамкнутым ротором. Карпов Ф.Ф. 1964 г.
2. Проектирование кабельных сетей и проводок. Хромченко Г.Е. 1980 г.




