Что такое линейный двигатель. Линейные электродвигатели
В привычных для нас двигателях внутреннего сгорания начальное звено -- поршни, совершают . Затем это движение, с помощью кривошипно-шатунного механизма преобразовывается во вращательное. В некоторых устройствах первое и последнее звено совершают один вид движения.
Например, в двигатель-генераторе нет необходимости сначала возвратно-поступательное движение преобразовывать во вращательное, а затем, в генераторе, из этого вращательного движения извлекать прямолинейную составляющую, то есть делать два противоположных преобразования.
Современное развитие электронной преобразовательной техники позволяет адаптировать для потребителя выходное напряжение линейного электрогенератора, это дает возможность создать устройство, в котором часть замкнутого электрического контура совершает не вращательное движение в магнитном поле, а возвратно-поступательное вместе с шатуном двигателя внутреннего сгорания. Схемы, поясняющие принцип работы традиционного и линейного генератора, приведены на рис. 1.
В обычном генераторе для получения напряжения используется проволочная рамка, вращающаяся в магнитном поле и приводимая в движение внешним движителем. В предложенном генераторе, проволочная рамка движется линейно в магнитном поле. Это небольшое и непринципиальное различие дает возможность значительно упростить и удешевить движитель, если в его качестве используется двигатель внутреннего сгорания.
Также, в поршневом компрессоре, приводимом в движение поршневым двигателем, входное и выходное звено совершает , рис. 2.
Преимущества линейного двигателя
Малые габариты и вес, из-за отсутствия кривошипно-шатунного механизма. Высокая наработка на отказ, из-за отсутствия кривошипно-шатунного механизма и из-за присутствия только продольных нагрузок. Невысокая цена, из-за отсутствия кривошипно-шатунного механизма. Технологичность — для изготовления деталей необходимы только нетрудоемкие операции, токарные и фрезерные. Возможность перехода на другой вид топлива без остановки двигателя.
Управление зажиганием с помощью давления при сжатии рабочей смеси
У обычного двигателя для подачи электрического напряжения (тока) на свечу зажигания должно выполняться два условия:
Первое условие определяется кинематикой кривошипно-шатунного механизма - поршень должен находиться в верхней мертвой точке (без учета опережения зажигания);
Второе условие определяется термодинамическим циклом - давление в камере сгорания, перед рабочим циклом, должно соответствовать используемому топливу.
Одновременно выполнить два условия очень сложно. При сжатии воздуха или рабочей смеси, происходит утечка сжимаемого газа в камере сгорания через кольца поршня и др. Чем медленнее происходит сжатие (медленнее вращается вал двигателя), тем утечка выше. При этом давление в камере сгорания, перед рабочим циклом, становиться меньше оптимального и рабочий цикл происходит при неоптимальных условиях. Коэффициент полезного действия двигателя падает. То есть обеспечить высокий коэффициент полезного действия двигателя можно только в узком диапазоне скоростей вращения выходного вала.
Поэтому, например, коэффициент полезного действия двигателя на стенде составляет примерно 40%, а в реальных условиях, на автомобиле, при разных режимах движения, эта величина падает до 10…12%.
В линейном двигателе нет кривошипно-шатунного механизма, поэтому не надо выполнять первое условие, не имеет значения, где находится поршень перед рабочим циклом, имеет значение только давление газа в камере сгорания перед рабочим циклом. Поэтому, если подачей электрического напряжения (тока) на свечу зажигания будет управлять не положение поршня, а давление в камере сгорания, то рабочий цикл (зажигание) всегда будет начинаться при оптимальном давлении, независимо от частоты работы двигателя, рис. 3.
Таким образом, в любом режиме работы линейного двигателя, мы будем иметь максимальную площадь петли термодинамического цикла Карно, соответственно, и высокий коэффициент полезного действия при разных режимах работы двигателя.
Управление зажиганием с помощью давления в камере сгорания, также дает возможность «безболезненно» переходить на другие виды топлива. Например, при переходе с высокооктанового вида топлива на низкооктановый вид, в линейном двигателе, надо только дать команду системе зажигания, чтобы подача электрического напряжения (тока) на свечу зажигания происходила при более низком давлении. В обычном двигателе для этого необходимо было бы изменять геометрические размеры поршня или цилиндра.
Реализовать управление зажиганием давлением в цилиндре можно с помощью пьезоэлектрического или емкостного метода измерения давления.
Датчик давления выполнен в виде шайбы, которая помещена под гайку шпильки крепления головки цилиндра, рис. 3. Сила давления газа в камере сжатия, действует на датчик давления, который находится под гайкой крепления головки цилиндра. И информация о давлении в камере сжатия, передается на блок управления моментом зажигания. При давлении в камере, соответствующем давлению зажигания данного топлива, система зажигания подает электрическое напряжение (ток) на свечу зажигания. При резком увеличении давления, что соответствует началу рабочего цикла, система зажигания снимает электрическое напряжение (ток) со . При отсутствии увеличении давления через заданное время, что соответствует отсутствию начала рабочего цикла, система зажигания подает управляющий сигнал пуска двигателя. Также выходной сигнал датчика давления в цилиндре используется для определения частоты работы двигателя и его диагностики (определение компрессии и др.).
Сила сдавливания прямо пропорциональна давлению в камере сгорания. После того, как давление, в каждом из противоположных цилиндров, станет не меньше заданного (зависит от вида используемого топлива), система управления подает команду для зажигания горючей смеси. При необходимости перейти на другой вид топлива, меняется величина заданного (опорного) давления.
Также регулировка момента зажигания горючей смеси может осуществляться в автоматическом режиме, как в обычном двигателе. На цилиндре размещен микрофон -- датчик детонации. Микрофон преобразовывает механические звуковые колебания корпуса цилиндра в электрический сигнал. Цифровой фильтр, из этого набора суммы синусоид электрического напряжения, извлекает гармонику (синусоиду), соответствующую режиму детонации. При появлении на выходе фильтра сигнала соответствующему появлению детонации в двигателе, система управление снижает величину опорного сигнала, который соответствует давлению зажигания горючей смеси. При отсутствии сигнала соответствующему детонации, система управления, через некоторое время увеличивает величину опорного сигнала, который соответствует давлению зажигания горючей смеси, до появления частот предшествующих детонации. Опять, при появлении частот, предшествующих детонации, система снижает опорный сигнал, что соответствует снижению давления зажигания, до бездетонационного зажигания. Таким образом, система зажигания подстраивается под используемый вид топлива.
Принцип работы линейного двигателя
Принцип работы линейного, как и обычного двигателя внутреннего сгорания, основан на эффекте теплового расширения газов, возникающего при сгорании топливно-воздушной смеси и обеспечивающего перемещение поршня в цилиндре. Шатун передаёт прямолинейное возвратно-поступательное движение поршня линейному электрогенератору, или поршневому компрессору.
Рис. 4, состоит из двух поршневых пар, работающих в противофазе, что дает возможность сбалансировать двигатель. Каждая пара поршней соединена шатуном. Шатун подвешен на линейных подшипниках и может свободно колебаться, вместе с поршнями, в корпусе генератора. Поршни помещены в цилиндры двигателя внутреннего сгорания. Продувка цилиндров осуществляется через продувочные окна, под действием небольшого избыточного давления, создаваемого в предпускной камере. На шатуне расположена подвижная часть магнитопровода генератора. Обмотка возбуждения создает магнитный поток необходимый для генерации электрического тока. При возвратно-поступательном движении шатуна, а вместе с ним и части магнитопровода, линии магнитной индукции, создаваемой обмоткой возбуждения, пересекают неподвижную силовую обмотку генератора, индуцируя в ней электрическое напряжение и ток (при замкнутой электрической цепи).
|
|
| Рис. 4. . |
Линейный компрессор, рис. 5, состоит из двух поршневых пар, работающих в противофазе, что дает возможность сбалансировать двигатель. Каждая пара поршней соединена шатуном. Шатун подвешен на линейных подшипниках и может свободно колебаться вместе с поршнями в корпусе. Поршни помещены в цилиндры двигателя внутреннего сгорания. Продувка цилиндров осуществляется через продувочные окна, под действием небольшого избыточного давления, создаваемого в предпускной камере. При возвратно-поступательном движении шатуна, а вместе с ним и поршней компрессора, воздух под давлением подается в ресивер компрессора.
|
|
| Рис. 5. Линейный компрессор. |
Рабочий цикл в двигателе осуществляется за два такта.
2. Такт рабочего хода. При положении поршня около верхней мертвой точки, сжатая рабочая смесь воспламеняется электрической искрой от свечи, в результате чего температура и давление газов резко возрастают. Под действием теплового расширения газов поршень перемещается к нижней мертвой точке, при этом расширяющиеся газы совершают полезную работу. Одновременно, поршень создает высокое давление в предпускной камере. Под действием давления клапан закрывается, не давая, таким образом, воздуху попасть во впускной коллектор.
Система вентиляции
При рабочем ходе в цилиндре, рис. 6 рабочий ход, поршень под действием давления в камере сгорания, движется по направлению указанном стрелкой. Под действием избыточного давления в предпускной камере, клапан закрыт, и здесь происходит сжатие воздуха для вентиляции цилиндра. При достижении поршнем (компрессионными кольцами) продувочных окон, рис. 6 вентиляция, давление в камере сгорания резко падает, и далее поршень с шатуном движется по инерции, то есть масса подвижной части генератора играет роль маховика в обычном двигателе. При этом полностью открываются продувочные окна и сжатый в предвпускной камере воздух, под действием разницы давлений (давление в предпускной камере и атмосферное давление), продувает цилиндр. Далее, при рабочем цикле в противоположном цилиндре, осуществляется цикл сжатия.
При движении поршня в режиме сжатия сжатия, рис. 6 сжатие, поршнем закрываются продувочные окна, осуществляется впрыск жидкого топлива, в этот момент воздух в камере сгорания находится под небольшим избыточным давлением начала цикла сжатия. При дальнейшем сжатии, как только давление сжимаемой горючей смеси станет равным опорному (заданному для данного вида топлива), на электроды свечи зажигания будет подано электрическое напряжение, произойдет зажигание смеси, начнется рабочий цикл и процесс повторится. При этом двигатель внутреннего сгорания представляет собой только два соосных и противоположно размещенных цилиндра и поршня, связанных между собой механически.
Топливный насос
Привод топливного насоса линейного электрогенератора, представляет собой кулачковую поверхность, зажатую между роликом поршня насоса и роликом корпуса насоса, рис. 7. Кулачковая поверхность совершает возвратно поступательное движение вместе с шатуном двигателя внутреннего сгорания, и раздвигает ролики поршня и насоса при каждом такте, при этом поршень насоса движется относительно цилиндра насоса и происходит выталкивание порции топлива к форсунке впрыска топлива, в начале цикла сжатия. При необходимости изменить количество выталкиваемого за один такт топлива, осуществляется поворот кулачковой поверхности относительно продольной оси. При повороте кулачковой поверхности относительно продольной оси, ролики поршня насоса и ролики корпуса насоса, будут раздвигаться или сдвигаться (в зависимости от направления вращения) на разное расстояние, изменится ход поршня топливного насоса и изменится порция выталкиваемого топлива. Поворот возвратно-поступательно движущегося кулачка вокруг своей оси, осуществляется с помощью неподвижного вала, который заходит в зацепление с кулачком посредством линейного подшипника. Таким образом, кулачок движется возвратно-поступательно, а вал остается неподвижным. При повороте вала вокруг своей оси, осуществляется поворот кулачковой поверхности вокруг своей оси и ход топливного насоса изменяется. Вал изменения порции впрыска топлива, приводится в движение шаговым двигателем или вручную.
Привод топливного насоса линейного компрессора, представляет собой также кулачковую поверхность, зажатую между плоскостью поршня насоса и плоскостью корпуса насоса, рис. 8. Кулачковая поверхность совершает возвратно-вращательное движение вместе с валом шестерни синхронизации двигателя внутреннего сгорания, и раздвигает плоскости поршня и насоса при каждом такте, при этом поршень насоса движется относительно цилиндра насоса и происходит выталкивание порции топлива к форсунке впрыска топлива, в начале цикла сжатия. При работе линейного компрессора нет необходимости менять количество выталкиваемого топлива. Работа линейного компрессора подразумевается только в паре с ресивером - накопителем энергии, который может сглаживать пики максимальной нагрузки. Поэтому целесообразно выводить двигатель линейного компрессора только на два режима: режим оптимальной нагрузки и режим холостого хода. Переключение между этими двумя режимами осуществляется с помощью электромагнитных клапанов, системой управления.
Система пуска
Система пуска линейного двигателя осуществляется, как и у обычного двигателя, с помощью электропривода и накопителя энергии. Пуск обычного двигателя происходит с помощью стартера (электропривода) и маховика (накопителя энергии). Пуск линейного двигателя осуществляется с помощью линейного электрокомпрессора и пускового ресивера, рис. 9.
|
|
| Рис. 9. Система пуска. |

При пуске, поршень пускового компрессора, при подаче питания, поступательно движется за счет электромагнитного поля обмотки, а затем пружиной возвращается в исходное состояние. После накачки ресивера до 8…12 атмосфер, питание снимается с клемм пускового компрессора и двигатель готов к запуску. Пуск происходит путем подачи сжатого воздуха в предвпускные камеры линейного двигателя. Подача воздуха осуществляется с помощью электромагнитных клапанов, работой которых управляет система управления. Так как система управления не имеет информации, в каком положении находятся шатуны двигателя, перед пуском, то подачей высокого давления воздуха в предпускные камеры, например, крайних цилиндров, поршни гарантировано передвигаются в исходное состояние перед запуском двигателя. Затем производится подача высокого давления воздуха в предпускные камеры средних цилиндров, таким образом, производится вентиляция цилиндров перед запуском. После этого производится подача высокого давления воздуха опять в предпускные камеры крайних цилиндров, для запуска двигателя. Как только начнется рабочий цикл (датчик давления покажет высокое давление в камере сгорания, соответствующее рабочему циклу), система управления, с помощью электромагнитных клапанов прекратит подачу воздуха от пускового ресивера.
Система синхронизации
Синхронизация работы шатунов линейного двигателя осуществляется с помощью синхронизирующей шестерни и пары зубчатых реек, рис. 10, прикрепленных к подвижной части магнитопровода генератора или поршней компрессора. Зубчатая шестерня одновременно является приводом масляного насоса, с помощью которого осуществляется принудительная смазка узлов трущихся деталей линейного двигателя.
Уменьшение массы магнитопровода и схемы включения обмоток электрогенератора.
Генератор линейного бензогенератора представляет собой синхронную электрическую машину. В обычном генераторе ротор совершает вращательное движение, и масса подвижной части магнитопровода не является критичной. В линейном генераторе подвижная часть магнитопровода совершает возвратно-поступательное движение вместе с шатуном двигателя внутреннего сгорания, и высокая масса подвижной части магнитопровода делает работу генератора невозможной. Необходимо найти способ уменьшения массы подвижной части магнитопровода генератора.
|
|
| Рис. 11. Генератор. |
Для уменьшения массы подвижной части магнитопровода, необходимо уменьшить его геометрические размеры, соответственно уменьшится объем и масса, рис 11. Но тогда магнитный поток пересекает только обмотку в одной паре окон вместо пяти, это равнозначно, что магнитный поток пересекает проводник в пять раз короче, соответственно, и выходное напряжение (мощность) уменьшиться в 5 раз. Для компенсации уменьшения напряжения генератора необходимо добавить количество витков в одном окне, таким образом, чтобы длина проводника силовой обмотки стала такой же, как и в первоначальном варианте генератора, рис 11.
Но чтобы большее количество витков легло в окне с неизменными геометрическими размерами, необходимо уменьшить поперечное сечение проводника.
При неизменной нагрузке и выходном напряжении, тепловая нагрузка, для такого проводника, в этом случае увеличится, и станет больше оптимальной (ток остался таким же, а поперечное сечение проводника уменьшилось почти в 5 раз). Это было бы в том случае, если обмотки окон соединены последовательно, то есть когда ток нагрузки протекает через все обмотки одновременно, как в обычном генераторе. Но если к нагрузке попеременно подключать только обмотку пары окон, которую в данный момент пересекает магнитный поток, то эта обмотка за такой короткий промежуток времени, не успеет перегреться, так как тепловые процессы инерционны. То есть необходимо попеременно подключать к нагрузке только ту часть обмотки генератора (пару полюсов), которую пересекает магнитный поток, остальное время она должна остывать. Таким образом, нагрузка все время включена последовательно только с одной обмоткой генератора. При этом действующее значение тока, протекающего через обмотку генератора, не превысит оптимальной величины, с точки зрения нагрева проводника. Таким образом, можно значительно, более чем в 10 раз, снизить массу не только подвижной части магнитопровода генератора, а и массу неподвижной части магнитопровода. Коммутация обмоток осуществляется с помощью электронных ключей. В качестве ключей, для попеременного подключения обмоток генератора к нагрузке, используются полупроводниковые приборы - тиристоры (симисторы). Линейный генератор, это развернутый обычный генератор, рис. 11. Например, при частоте соответствующей 3000 цикл/мин и ходе шатуна 6 см, каждая обмотка будет нагреваться в течении 0.00083 сек, током в 12 раз превышающим номинальный, остальное время -- почти 0,01 сек, эта обмотка будет охлаждаться. При уменьшении рабочей частоты, время нагрева будет увеличиваться, но, соответственно, будет уменьшаться ток, который течет через обмотку и через нагрузку. Симистор -- это выключатель (может замыкать или размыкать электрическую цепь). Замыкание и размыкание происходит автоматически. При работе, как только магнитный поток начнет пересекать витки обмотки, то на концах обмотки появляется индуцированное электрическое напряжение, это приводит к замыканию электрической цепи (открыванию симистора). Затем, когда магнитный поток пересекает витки следующей обмотки, то падение напряжения на электродах симистора приводит к размыканию электрической цепи. Таким образом, в каждый момент времени, нагрузка все время включена, последовательно, только с одной обмоткой генератора.
На рис. 12 показан сборочный чертеж генератора без обмотки возбуждения.
Большинство деталей линейных двигателей, образованы поверхностью вращения, то есть имеют цилиндрические формы. Это дает возможность изготавливать их с помощью самых дешевых и поддающихся автоматизации токарных операций.
|
|
| Рис. 12. Сборочный чертеж генератора. |
Математическая модель линейного двигателя
Математическая модель линейного генератора строится на основе закона сохранения энергии и законов Ньютона: в каждый момент времени, при t0 и t1, должно обеспечиваться равенство сил действующих на поршень. Через малый промежуток времени, под действием результирующей силы, поршень переместится на некоторое расстояние. На этом коротком участке принимаем, что поршень двигался равноускорено. Значение всех сил изменятся согласно законам физики и вычисляются по известным формулам
[ Cправочник по физике: Кухлинг Х. Пер. с нем. 2-е изд. - М.: Мир, 1985. - 520 с., ил.]. Все данные автоматически заносятся в таблицу, например в программе Excel. После этого t0 присваиваются значения t1 и цикл повторяется. То есть мы производим операцию логарифмирования.
Математическая модель представляет собой таблицу, например, в программе Excel, и сборочный чертеж (эскиз) генератора. На эскизе проставлены не линейные размеры, а координаты ячеек таблицы в Excel. В таблицу вносятся соответствующие предполагаемые линейные размеры, и программа вычисляет и строит график движения поршня, в виртуальном генераторе. То есть, подставив размеры: диаметр поршня, объём предвпускной камеры, ход поршней до продувочных окон и т. д., мы получим графики зависимости пройденного расстояния, скорости и ускорения движения поршня от времени. Это дает возможность виртуально просчитать сотни вариантов, и выбрать самый оптимальный.
Форма обмоточных проводов генератора
Слой проводов одного окна линейного генератора, в отличие от обычного генератора, лежит в одной закрученной по спирали плоскости, поэтому обмотку проще наматывать проводами не круглого сечения, а прямоугольного, то есть обмотка представляет собой закрученную по спирали медную пластину. Это дает возможность повысить коэффициент заполнения окна, а также значительно увеличить механическую прочность обмоток. Следует учитывать, что скорость шатуна, а значит и подвижной части магнитопровода, не одинакова. Это значит, что линии магнитной индукции пересекают обмотку разных окон с разными скоростями. Для полного использования обмоточных проводов, количество витков каждого окна, должно соответствовать скорости магнитного потока возле этого окна (скорости шатуна). Количество витков обмоток каждого окна выбирается с учетом зависимости скорости шатуна от расстояния, пройденного шатуном.
Также для более равномерного напряжения генерированного тока, можно наматывать обмотку каждого окна медной пластиной разной толщины. На участке, где скорость шатуна не велика, намотка осуществляется пластиной меньшей толщины. В окно поместится большее количество витков обмотки и, при меньшей скорости шатуна на этом участке, генератор будет выдавать напряжение соизмеримое с напряжением тока на более «скоростных» участках, хотя генерированный ток будет значительно ниже.
Применение линейного электрогенератора
Основное применение описанного генератора — источник бесперебойного питания на предприятиях небольшой мощности, позволяющий подключенному оборудованию продолжительное время работать при пропадании сетевого напряжения, или при выходе его параметров за допустимые нормы. Электрогенераторы могут применяться для обеспечения электрической энергией промышленного и бытового электрооборудования, в местах отсутствия электрических сетей, а также в качестве силового агрегата для транспортного средства (гибридный автомобиль), в качестве мобильного генератора электрической энергии. Например, генератор электрической энергии в виде дипломата (чемодана, сумки). Пользователь берет с собой в места, где нет электрических сетей (стройка, поход, загородный дом, и т. д.) При необходимости, нажав на кнопку «пуск», генератор запускается и питает электрической энергией подключенные к нему электрические приборы: электроинструмент, бытовые приборы. Это обычный источник электрической энергии, только гораздо дешевле и легче аналогов.
Применение линейных двигателей дает возможность создать недорогой, простой в эксплуатации и управлении, легкий автомобиль.
Транспортное средство с линейным электрогенератором
Транспортное средство с линейным электрогенератором представляет собой двухместный легкий (250 кг) автомобиль, рис. 13.
При управлении не требуется переключать скорости (две педали). За счет того, что генератор может развивать максимальную мощность, даже, при «трогании» с места (в отличие от обычного автомобиля), то разгонные характеристики, даже при небольших мощностях тягового двигателя, имеют лучшие показатели чем аналогичные характеристики обычных автомобилей. Эффект усиления руля и системы ABS достигается программно, так как все необходимое «железо» уже есть (привод на каждое колесо позволяет управлять крутящим или тормозным моментом колеса, например, при повороте руля перераспределяется крутящий момент между правым и левым управляющим колесом, и колеса поворачиваются сами, водитель только разрешает им поворачиваться, то есть управление без усилий). Блочная компоновка позволяет компоновать автомобиль по желанию потребителя (можно без труда за несколько минут заменить генератор на более мощный).
Это обычный автомобиль только гораздо дешевле и легче аналогов.
Особенности — простота управления, дешевизна, быстрый набор скорости, мощность до 12 кВт, привод на все колеса (автомобиль повышенной проходимости).
Транспортное средство с предложенным генератором, из-за специфической формы генератора, имеет очень низкий центр тяжести, поэтому будет иметь высокую устойчивость при движении. Также такое транспортное средство будет иметь очень высокие разгонные характеристики. В предложенном транспортном средстве может использоваться максимальная мощность силового агрегата при всем диапазоне скоростей. Распределенная масса силового агрегата не нагружает кузов автомобиля, поэтому его можно сделать дешевым, легким и простым.
Тяговый двигатель транспортного средства, в котором в качестве силового агрегата используется , должен удовлетворять таким условиям:
Силовые обмотки двигателя должны непосредственно, без преобразователя, подключаться к клеммам генератора (для увеличения коэффициента полезного действия электрической трансмиссии и уменьшения цены преобразователя тока);
Скорость вращения выходного вала электродвигателя должна регулироваться в широком диапазоне, и не должна зависеть от частоты работы электрогенератора;
Двигатель должен иметь высокую наработку на отказ, то есть быть надежным в работе (не иметь коллектора);
Двигатель должен быть недорогим (простым);
Двигатель должен иметь высокий крутящий момент при низкой частоте вращения выходного вала;
Двигатель должен иметь небольшую массу.
Схема включения обмоток такого двигателя показана на рис. 14. Путем изменения полярности питания обмотки ротора получаем крутящий момент ротора.
Также путем изменения величины и полярности питания обмотки ротора вводится скольжение вращение ротора относительно магнитного поля статора. Управлением тока питания обмотки ротора, происходит управление скольжением, в диапазоне от 0…100%. Мощность питания обмотки ротора составляет, примерно, 5% от мощности двигателя, поэтому надо делать не для всего тока тяговых двигателей, а только для их тока возбуждения. Мощность преобразователя тока, например, для бортового электрогенератора 12 кВт, составляет всего 600 Вт, причем эта мощность разделена на четыре канала (для каждого тягового двигателя колеса свой канал), то есть мощность каждого канала преобразователя составляет 150 Вт. Поэтому невысокий коэффициент полезного действия преобразователя не окажет существенного влияния на КПД системы. Преобразователь может быть построен с помощью маломощных, дешевых полупроводниковых элементов.
Ток с выводов электрогенератора без всяких преобразований подается на силовые обмотки тяговых электродвигателей. Преобразовывается только ток возбуждения, таким образом, чтобы он всегда находился в противофазе с током силовых обмоток. Так как ток возбуждения составляет всего 5…6% от всего тока, потребляемого тяговым электродвигателем, то преобразователь необходим на мощность 5…6% от всей мощности генератора, что значительно снизит цену и вес преобразователя и повысит коэффициент полезного действия системы. В этом случае, преобразователю тока возбуждения тяговых двигателей необходимо «знать», в каком положении находится вал двигателя, чтобы в каждый момент времени на обмотки возбуждения подавать ток для создания максимального крутящего момента. Датчиком положения выходного вала тягового двигателя является абсолютный энкодер.
Применение линейного электрогенератора, в качестве силового агрегата транспортного средства позволяет создать автомобиль блочной компоновки. При необходимости, можно за несколько минут поменять крупные узлы и агрегаты, рис. 15, а также применить кузов с наилучшим обтеканием, так как у маломощного автомобиля нет резерва мощности для преодоления сопротивления воздуха из-за несовершенства аэродинамических форм (из-за высокого коэффициента сопротивления).
Транспортное средство с линейным компрессором
Транспортное средство с линейным компрессором представляет собой двухместный легкий (200 кг) автомобиль, рис. 16. Это более простой и дешевый аналог автомобиля с линейным генератором, но с более низким КПД трансмиссии.
В качестве датчика скорости вращения колеса используется инкрементальный энкодер. Инкрементальный энкодер имеют импульсный выход, при повороте на определённый угол на выходе генерируется импульс напряжения. Электронная схема датчика, «подсчитывает» количество импульсов за единицу времени, и записывает этот код в выходной регистр. При «подаче» системой управления кода (адреса) данного датчика, электронная схема энкодера, в последовательном виде выдает код с выходного регистра, на информационный проводник. Система управления считывает код датчика (информацию о скорости вращения колеса) и по заданному алгоритму вырабатывает код для управления шаговым двигателем исполнительного механизма.
Заключение
Стоимость транспортного средства, для большинства людей, составляет 20…50 месячных заработков. Люди не могут себе позволить приобрести новый автомобиль за 8…12 тыс $, а на рынке нет автомобиля в ценовом диапазоне 1…2 тыс $. Использование линейного электрогенератора или компрессора, в качестве силового агрегата автомобиля, позволяет создать простое в эксплуатации, и недорогое транспортное средство.
Современные технологии производства печатных плат, и ассортимент выпускаемой электронной продукции, позволяет сделать почти все электрические соединения с помощью двух проводов - силового и информационного. То есть не производить монтаж соединения каждого отдельного электрического прибора: датчиков, исполнительных и сигнальных устройств, а подсоединить каждый прибор к общему силовому, и общему информационному проводу. Система управления, по очереди, выводит коды (адреса) приборов, в последовательном коде, на информационный провод, после чего ожидает информацию о состоянии прибора, тоже в последовательном коде, и по этой же линии. На основании этих сигналов система управления формирует коды управления для исполнительных и сигнальных устройств и передает их, для перевода исполнительных или сигнальных устройств в новое состояние (при необходимости). Таким образом, при монтаже или ремонте каждое устройство необходимо соединить с двумя проводами (эти два провода являются общими для всех бортовых электроприборов) и электрической массой.
Для снижения себестоимости, а соответственно и цены продукции для потребителя, необходимо упростить монтаж и электрические соединения бортовых приборов. Например, при традиционном монтаже, для включения заднего габаритного огня, необходимо замкнуть, с помощью выключателя, электрическую цепь питания осветительного прибора. Цепь состоит из: источника электрической энергии, соединительного провода, сравнительно мощного выключателя, электрической нагрузки. Каждый элемент цепи, кроме источника питания, требует индивидуального монтажа, недорогой механический выключатель, имеет низкое количество циклов «включения-выключения». При большом количестве бортовых электроприборов, цена монтажа и соединительных проводов возрастает пропорционально количеству устройств, повышается вероятность ошибки из-за человеческого фактора. При крупносерийном производстве проще управление приборами и считывание информации с датчиков сделать по одной линии, а не по индивидуальной, для каждого прибора. Например, для включения заднего габаритного огня, в этом случае, необходимо дотронуться до сенсорного датчика прикосновения, схема управления сформирует код управления для включения заднего габаритного огня. На информационный провод будет выведен адрес устройства включения заднего габаритного огня и сигнал на включение, после чего замкнется внутренняя цепь питания заднего габаритного огня. То есть электрические цепи формируются комплексно: автоматически при производстве печатных плат (например, при монтаже плат на SMD линиях), и путем электрического соединения всех приборов с двумя общими проводами и электрической «массой».
Список литературы
- Справочник по физике: Кухлинг Х. Пер. с нем. 2-е изд. - М.: Мир, 1985. - 520 с., ил.
- Газовая турбина на железнодорожном транспорте. Бартош Е. Т. Изд-во «Транспорт», 1972, стр. 1—144.
- Черчение — Хаскин А. М. 4 - е изд., перрераб. И доп. --.: Вища шк. Головное изд - во, 1985. - 447 с.
- Симисторы и их применение в бытовой электроаппаратуре, Ю. А. Евсеев, С. С. Крылов. 1990.
- Ежемесячный рекламно-информационный журнал «Электротехнический рынок» №5 (23) сентябрь-октябрь 2008.
- Проектирование автотракторных двигателей. Р. А. Зейнетдинов, Дьяков И. Ф., С. В. Ярыгин. Учебное пособие. Ульяновск: УлГТУ, 2004.- 168 с.
- Основы преобразовательной техники: учебное пособие для вузов/ О. З. Попков. 2-е изд., стереот. - М.: Издательский дом МЭИ, 2007. 200 с.: ил.
- Основы промышленной электроники: Учебник для неэлектротехн. спец. вузов /В.Г. Герасимов, О М. Князьков, А Е. Краснопольский, В.В. Сухоруков; под ред. В.Г. Герасимова. - 3-е изд., перераб. и доп. - М.: Высш. шк., 2006. - 336 с., ил.
- . Теория и расчёт рабочих процессов. 4-е изд., переработ, и дополн. Под общей редакцией А.С. Орлина и М.Г. Круглова. М.: Машиностроение. 1984.
- Электротехника и электроника в 3-х кн. Под ред. В.Г. Герасимова Кн.2. Электромагнитные устройства и электрические машины. - М.: Высшая шк. - 2007 г.
Огромное Спасибо за Ваш вклад в развитие отечественной науки и техники!
Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Преобразование вращательного движения в поступательное осуществляется посредством специальных кинематических звеньев: винт-гайка, шарико-винтовая передача, шестерня-зубчатая рейка, кривошипно-шатунная передача и другие.
Естественным для конструкторов рабочих машин является желание использовать для привода рабочих органов, совершающих поступательное и возвратно-поступательное движение, двигателей, ротор которых движется линейно.
В настоящее время получают развитие электроприводы, использующие линейные асинхронные, вентильные и . Принципиально линейный двигатель любого типа может быть образован из двигателя вращательного движения путем линейной развертки цилиндрического статора в плоскость.
Представление об устройстве линейного асинхронного двигателя можно получить, если развернуть статор асинхронного двигателя в плоскость. При этом вектор намагничивающих сил статора будет линейно перемещаться вдоль развертки статора, т.е. при этом образуется не вращающееся (как в обычных двигателях), а бегущее электромагнитное поле статора.
В качестве вторичного элемента может использоваться ферромагнитная полоса, располагаемая с небольшим воздушным зазором вдоль развертки статора. Эта полоса играет роль короткозамкнутого ротора. Вторичный элемент увлекается движущимся полем статора и линейно перемещается со скоростью, меньшей скорости движения поля статора на величину линейного абсолютного скольжения.
Линейная скорость бегущего электромагнитного поля будет
![]()
где τ, м - полюсное деление - расстояние между соседними полюсами линейного асинхронного двигателя.
Скорость вторичного элемента
![]()
где sЛ - относительное линейное скольжение.
При питании двигателя напряжением стандартной частоты получаемые скорости поля будут достаточно велики (более 3 м/с), что затрудняет использование этих двигателей для привода промышленных механизмов. Такие двигатели применяются для высокоскоростных транспортных механизмов. Для получения более низких скоростей движения и регулирования скорости линейного асинхронного двигателя его обмотки питают от преобразователя частоты.
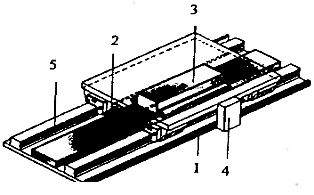
Рис. 1. Конструкция линейного однокоординатного двигателя.
Применяются несколько вариантов конструкций линейного асинхронного двигателя. Одна из них показана на рис. 1. Здесь вторичный элемент (2) - полоса, соединенный с рабочим органом, перемещается по направляющим 1 под действием бегущего электромагнитного поля, создаваемого статором 3. Такая конструкция удобна для компоновки с рабочей машинной, однако, она сопряжена со значительными потоками рассеяния поля статора, вследствие чего cosφ двигателя будет низким.

Рис.2. Линейный двигатель цилиндрической конструкции
Для увеличения электромагнитной связи между статором и вторичным элементом, последний размещают в прорезь между двумя статорами, либо конструкция двигателя выполняется в виде цилиндра (см. рис. 2). В этом случае статор двигателя представляет собой трубку (1), внутри которой расположены цилиндрические наборные катушки (2), являющиеся обмоткой статора. Между катушками размещены ферромагнитные шайбы 3, являющиеся частью магнитопровода. Вторичный элемент - шток трубчатой формы также выполнен из ферромагнитного материала.
Линейные асинхронные двигатели могут также иметь обращенную конструкцию, когда вторичный элемент неподвижен, а перемещается статор. Такие двигатели обычно применяются на транспортных средствах. В этом случае в качестве вторичного элемента используется рельс или специальная полоса, а статор размещается на подвижной тележке.
Недостатком линейных асинхронных двигателей является низкий к.п.д и связанные с этим потери энергии, прежде всего, во вторичном элементе (потери скольжения).
В последнее время кроме асинхронных начали применяться . Конструкция линейного двигателя такого типа аналогична представленной на рис. 1. Статор двигателя развернут в плоскость, а на вторичном элементе размещаются постоянные магниты. Возможен вариант обращенной конструкции, когда статор является подвижной частью, а вторичный элемент с постоянными магнитами неподвижен. Переключение обмоток статора производится в зависимости от относительного положения магнитов. С этой целью в конструкции предусмотрен датчик положения (4 - на рис. 1).
Для позиционных приводов эффективно применяются также линейные шаговые двигатели. Если развернуть в плоскость статор шагового двигателя, а вторичный элемент выполнить в виде пластины, на которой путем фрезерования канавок образованы зубцы, то при соответствующем переключении обмоток статора вторичный элемент будет совершать дискретное движение, шаг которого может быть весьма малым - до долей миллиметра. Часто применяется обращенная конструкция, в которой вторичный элемент неподвижен.
Скорость линейного шагового двигателя определяется величиной зубцового деления τ, числом фаз m и частотой переключения
Получение высоких скоростей движения не вызывает трудностей, поскольку увеличение зубцового деления и частоты не лимитируется технологическими факторами. Ограничения существуют для минимального значения τ, т.к. отношение зубцового деления к величине зазора между статором и вторичным элементом должно быть не меньше 10.

Использование дискретного привода позволяет не только упростить конструкцию механизмов, совершающих линейное однокоординатное движение, но и дает возможность с помощью одного привода получить двух или многокоординатное движение. Если на статоре подвижной части расположить ортогонально две системы обмоток, а во вторичном элементе выполнить канавки в двух перпендикулярных направлениях, то подвижный элемент будет совершать дискретное движение в двух координатах, т.е. обеспечивать перемещение на плоскости.
В этом случае возникает задача создания опоры для подвижного элемента. Для ее решения может использоваться воздушная подушка - напор воздуха, подаваемого в пространстве под подвижным элементам. Линейные шаговые двигатели развивают относительно низкое тяговое усилие и имеют низкий к.п.д. Основной областью их применения являются легкие манипуляторы, легкие сборочные станки, измерительные машины, станки для лазерной резки и другие устройства.
Католицкий Никита Александрович
студент Электроэнергетического факультета Ставропольский государственный аграрный университет г. Ставрополь, Россия
Аннотация: В статье описано устройство, виды линейных двигателей их отличия от других видов электродвигателей, подробно описано применение, достоинства и недостатки. Цель статьи заключается в описании преимущества линейных двигателей над другими.
Ключевые слова: Линейный электродвигатель, ротор, статор, привод, якорь, магнитопровод
Linear electric motor
Katolickij Nikita Aleksandrovich
student Electricity Department Stavropol State Agrarian University Stavropol, Russia
Abstract: In article the device, types of linear engines of their difference from other types of electric motors is described, application, merits and demerits is in detail described. The purpose of article consists in the description of advantage of linear engines over others.
Keywords: linear electric motor, rotor, stator, drive, anchor, magnetic conductor
На протяжении многих лет промышленность зависит от различных ременных и винтовых передач, а также пневматических механизмов необходимых для выполнения линейного позиционирования. Спрос на высокоскоростную пропускную способность, многочисленные рабочие циклы, гибкую настройку и программирование позволил определить недостатки в этих устройствах. Часто при выполнении точного контролируемого позиционирования в поступательном движении приходится идти на компромисс.
Благодаря технологии непосредственного привода линейного двигателя достигается высокое качество решения задач линейного позиционирования. Эта технология подразумевает непосредственное использование силы электромагнитного взаимодействия без использования ремня, шариковинтовой передачи либо промежуточного звена другого вида. Линейный привод обеспечивает непосредственное линейное перемещение (преобразование вращательного движения в поступательное не происходит).
Рисунок 1 – Устройство линейного двигателя
Электрический линейный двигатель является механизмом, в котором подвижная часть не находится во вращении (в традиционных вариантах двигателей подвижная часть вращается), а линейно перемещается вдоль неподвижной части агрегата, представленной в виде незамкнутого магнитопровода, длина которого имеет произвольное значение. Внутри магнитопровода создается бегущее магнитное поле. В стандартных электрических двигателях ротатор и статор свернуты в виде колец, а в линейном двигателе эти элементы растянуты в полосы. Благодаря тому, что обмотка статора включается поочередно, создается бегущее магнитное поле. В состав линейного электрического двигателя постоянного тока входит якорь с расположенной на его поверхности обмоткой, являющейся коллектором (направляющим элементом) и разомкнутый магнитопровод с обмотками возбуждения (подвижной частью), распложенными в таком порядке, что векторы сил, появляющихся в полюсах магнитопровода, имеют одно направление. Простота регуляции скорости перемещения подвижной части – отличительная черта линейного электродвигателя. Агрегаты переменного тока могут быть синхронного и асинхронного типа. Якорь в асинхронном линейном электродвигателе выполняется в виде бруска, чаще всего прямоугольного сечения, на котором отсутствует обмотка. Монтаж якоря выполняется вдоль пути перемещения подвижной части агрегата, оснащенной магнитопроводом с развернутыми многофазными обмотками, которые питаются от источника переменного тока. В результате взаимодействия магнитного поля магнитопровода подвижной части и поля якоря появляются силы, заставляющие подвижную часть перемещаться быстрее, относительно неподвижного якоря. Процесс происходит до момента уравнения скорости перемещения подвижной части и бегущего магнитного поля.
Чаще всего такие агрегаты используются в сфере электрического транспорта. Этому способствуют особые преимущества двигателей такого образца:
Прямолинейное движение статора отлично подходит для многих средств передвижения;
Простая конструкция, в которой отсутствуют трущиеся элементы, то есть энергетический поток внутри магнитного поля непосредственно преобразовывается в механическую энергию. Благодаря этому достигаются высокие показатели КПД и надежности агрегата;
Независимость силы тяги от сцепления колесных пар с рельсовыми путями. Это свойство недостижимо для стандартных агрегатов электрической тяги;
Отсутствие вероятности буксирования колес электрического транспорта, что стало причиной для выбора линейного двигателя;
Ускорение и скорость движения транспорта могут иметь любые значения, ограниченные комфортабельностью передвижения, допустимой скоростью качения колес по рельсовым путям и дорогам, а также степенью динамической устойчивости ходовой части транспортного средства и пути.
Линейные двигатели асинхронного типа необходимы для привода механизмов транспортировки различной продукции. Эти конвейеры оснащают металлическими лентами, проходящими внутри статоров линейных двигательных систем, выполняющими функцию вторичного элемента. Благодаря использованию линейной двигательной системы снижается степень предварительного натяжения ленты, устраняется вероятность ее проскальзывания, а также повышаются показатели скорости и надежности работы конвейера.
Линейные двигатели используют для машин ударного действия, к примеру, молоты для забивания свай, необходимые в сфере дорожных работ и строительстве. Статор линейной двигательной системы размещают на стреле молота, а его перемещение по направляющим элементам стрелы в вертикальном направлении обеспечивается благодаря лебедке. Ударная часть молота выполняет функцию вторичного элемента двигательной системы. Для осуществления подъема ударной части молота включение двигателя происходит так, что бегущее поле направляется вверх. При достижении ударным элементом крайнего верхнего положения происходит деактивация двигателя и происходит перемещение ударного элемента вниз на поверхность сваи под воздействием силы тяжести. Иногда деактивация двигателя не происходит – двигательная система работает в реверсивном режиме, увеличивая силу удара. В соответствии со степенью углубления сваи статор двигательной системы перемещается вниз благодаря лебедке. Конструкция электрического молота довольно проста. Его изготовить довольно просто. Повышенная точность в ходе производства его элементов не требуется, а его конструкция не чувствительна к изменениям температурных показателей, потому устройство может моментально приступить к выполнению своих функций.
Одним из видов линейных двигательных систем считаются магнитогидродинамические насосы. Эти устройства используют для перекачивания электропроводных жидкостей. Такие насосы широко используются: в металлургии для выполнения транспортировки, дозировки, а также перемещения металла в жидком виде и на АЭС для выполнения перекачки жидкометаллических теплоносителей.
Магнитогидродинамические насосы бывают двух видов: постоянного и переменного тока. В первом случае в роли первичного элемента (статора) выступает С-образный электромагнит. В воздушный зазор электрического магнита монтируют трубопровод с жидким металлом. Благодаря электродам, приваренным к стенкам трубопровода, пропускается постоянный ток от внешнего источника. В большинстве случаев обмотка возбуждения входит в последовательную цепь электродов. При возбуждении электрического магнита на металл, расположенный на участках, по которым проходит постоянный ток, оказывается воздействие электромагнитной силы, такой же, как сила, действующая на проводник с током, расположенным в зоне магнитного поля. В результате воздействия этой силы происходит перемещение металла по трубопроводу. Ключевые отличия МГД насосов заключаются в отсутствии движущихся механических элементов, а также в возможности герметизации канала транспортировки металла.
К преимуществам линейных двигательных систем стоит отнести отсутствие вращающихся элементов. К недостаткам стоит отнести низкие энергетические показатели, сравнительно со стандартными моделями электрических приводов, что объясняется разомкнутой электромагнитной цепью и существенными рабочими зазорами. Кроме того недостатками является сложность и высокая цена производства. Линейные двигательные системы используют для поездов, высокоскоростного наземного транспорта, относящегося к группе левитирующих транспортных средств. Общие показатели КПД стандартного агрегата и линейного электрического двигателя, в случае его оптимизации, практически равны, в случаях, когда исключаются промежуточные звенья передачи силы тяги. Со временем линейные электродвигатели вытеснят традиционные приводы с редукторами.
Список литературы:
- Гринченко В. А. Обоснование базовой конструкции линейного электродвигателя // Theoretical & Applied Science. - 2013. - Т. 1. - №11 (7). - С. 58-60.
- Гринченко В. А., Мишуков С. В. Расчет статической силы тяги линейного электродвигателя новой конструкции // Новые задачи технических наук и пути их решения. - Уфа: Аэтерна, 2014. - С. 18-20.
- Никитенко Г. В., Гринченко В. А. Линейный двигатель возвратно-поступательного движения с регулированием амплитуды колебаний якоря // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2009. - С. 407-410.
- Никитенко Г. В., Гринченко В. А. Результаты исследования линейного двигателя для вакуумного пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2010. - С. 268-272.
- Пат. 2357143 Российская Федерация, МПК8 F 16 К 31/06. Электромагнитный клапан / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2007141983/06; заявл. 12.11.07; опубл. 27.05.09.
- Пат. 2370874 Российская Федерация, МПК8 H 02 K 33/12. Линейный двигатель / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008112342/09; заявл. 31.03.08; опубл. 20.10.09.
- Пат. 82990 Российская Федерация, МПК8 А 01 J 7/00. Регулятор вакуума / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008150545/22; заявл. 19.12.08; опубл. 20.05.09.
Основные изменения, происходившие в приводной части станков за последний век, связаны с постепенным приближением двигателя к рабочему органу. На этом пути были массивные коробки подач с огромным количеством промежуточных элементов кинематической цепи, двух-трех ступенчатые редукторы, ременные передачи, прямые приводы через муфту. Всегда переход к следующему этапу был связан с применением последних научных разработок, получивших тем или иным способом свое приложение в станкостроении, появлением новых технологий либо удешевлением существующих. Изначально крайне дорогими являлись приводы на основе регулируемых электродвигателей и с шарико-винтовыми парами (ШВП), поэтому лишь отдельные производители находили целесообразным их использование. В наши дни уже сложно представить современный станок, который бы обошелся без ШВП или в котором величина подачи регулируется ступенчато, за счет перемещения блоков зубчатых колес.
Характерно то, что на каждом этапе никогда сразу не появлялась конструкция, оптимальная во всех отношениях. Совершенствование всегда происходило путем проб и ошибок, последовательной доработкой и устранением недостатков. В конечном итоге повсеместное распространение получали конфигурации узлов, прошедшие проверку временем, длительной эксплуатацией и доказавшие свою экономическую эффективность.

Рис. 1. ШВП
Такой вот отработанной, давно зарекомендовавшей себя, проверенной конструкцией является на данный момент привод с использованием ШВП, связанной с двигателем напрямую посредством муфты, реже ремня или зубчатой передачи. Производство всех элементов привода уже давно отработано, технологии оптимизированы, поэтому и стоимость вполне конкурентоспособна.
Тем не менее, желание конструкторов максимально сократить кинематическую цепь никуда не исчезло. Последней ступенькой, через которую надо было перешагнуть, стала шарико-винтовая пара. И сделать это позволили линейные двигатели.
Применение линейных двигателей в приводах подач современных станков является тем закономерным результатом, к которому привела их эволюция на протяжении десятков последних лет. Однако сейчас использование линейных приводов находится лишь на начальной стадии. Технология их изготовления до сих пор не до конца автоматизирована, цена высока, а применение далеко не всегда уместно. Линейный двигатель не получил своего «эталонного» воплощения (или ряда таких воплощений, испытанных временем, выбор из которых производится в зависимости от специфики использования) и существуют различные конструктивные исполнения, которые, несмотря на ряд безусловных общих преимуществ, значительно отличаются друг от друга, имея различные сильные и слабые стороны. Это тот этап, который проходит любая инновация. И все больше производителей останавливаются на линейных двигателях для приводов подач, причем как для оборудования специфического, такого, как электроэрозионные станки, так и для фрезерных и токарных станков .
Использование линейных двигателей оправдано для прецизионного оборудования и в том случае, когда большую роль играет динамическая характеристика привода: максимально допустимые ускорения, величины максимально и минимально допустимых скоростей. Тем не менее, даже на оборудование такого класса линейные привода устанавливаются, зачастую, лишь в маркетинговых целях, ведь ультрапрецизионное оборудование по умолчанию должно быть «напичкано» инновациями, позволяющими добиться высочайшей точности, недоступной конкурентам. При этом позабытыми оказываются как экономическая эффективность использования таких приводов, которая приводит к неоправданному повышению стоимости обработки, так и технологическая необходимость такого решения в целом.
В свете вышесказанного обращает на себя внимания стратегия, выбранная компанией Mitsubishi Electric . Более 40 лет назад компания представила свой первый электроэрозионный проволочно-вырезной станок, а уже в 1978 году — серийный высокоскоростной и высокоточный 4-х координатный электроэрозионный проволочно-вырезной обрабатывающий станок .

Рис. 2. Mitsubishi NA1200
Сегодня ноу-хау, накопленное за многие десятилетия в сочетании с интенсивной исследовательской работой, остаются решающим критерием при разработке новых систем электроэрозионной обработки. Являясь одним из ведущих производителей электроэрозионного оборудования и в то же время одним из крупнейших производителей линейных двигателей, японская фирма вплоть до недавнего времени не устанавливала их на свои станки. Лишь в 2009 году на станках серии NA (рис. 2) впервые были применены линейные двигатели (цилиндрические). Возникает вопрос, почему гигантская корпорация отказывается от использования в своем оборудовании своих же собственных компонентов, несмотря на то, что эти компоненты (линейные двигатели) успешно продаются по всему миру?
Стоит внимательно присмотреться к конкретным конструкциям, чтобы получить ответ на этот вопрос.
На сегодняшний день наиболее распространенными в металлообрабатывающих станках являются плоские линейные двигатели. Принципиальная схема такого двигателя приведена на рис. 3.
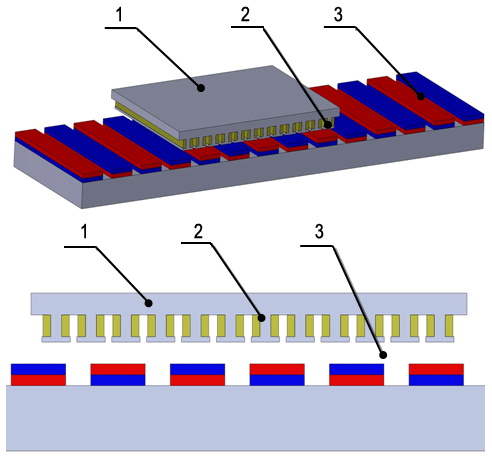
Рис. 3. Плоский линейный двигатель: принципиальная схема
Двигатель состоит из двух основных частей: ползуна, представляющего собой сердечник 1 с обмотками 2 и неподвижной частью с постоянными магнитами 3.
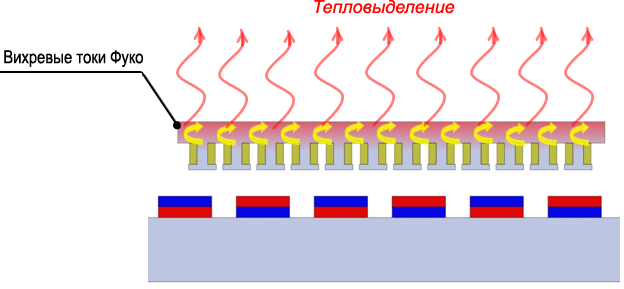
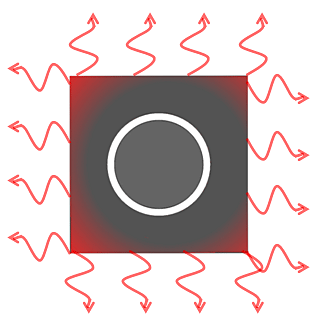
Как раз наличие сердечника и является основным источником характерных данному типу двигателей недостатков:
Рассмотрим теперь линейный двигатель, использованный компанией Mitsubishi Electric . В ультрапрецизионном станке Mitsubishi NA 1200 в качестве приводов по осям X, Y, U, V использованы цилиндрические линейные двигатели
Принципиальная схема цилиндрического линейного двигателя представлена на рис. 12. Особенность его конструкции заключается в том, что обмотки 2 расположены вокруг сформированных в виде цилиндра постоянных магнитов 1, а сердечника нет в принципе!
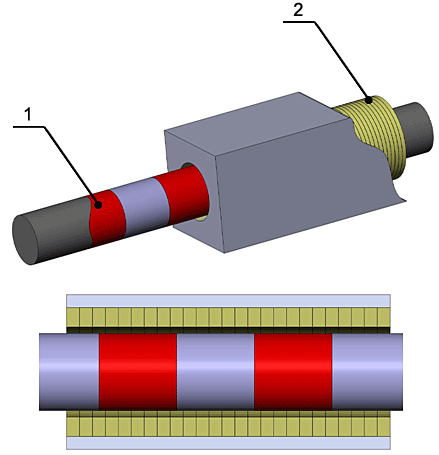
Рис. 12. Цилиндрический линейный двигатель: принципиальная схема
Цилиндрический линейный двигатель, благодаря своей конструкции, лишен всех рассмотренных выше недостатков плоского линейного двигателя. Остановимся подробнее на каждом из них.
Вернемся к вопросу, который прозвучал в начале: почему же лишь сравнительно недавно линейные двигатели появились в станках Mitsubishi? Теперь ответить на него значительно проще.

Рис. 18. Mitsubishi MV1200R
Очевидно, что специалисты компании, в угоду желанию быть на гребне волны технического прогресса, не стали отдавать предпочтение плоским линейным двигателям, которые не устраивали их в первую очередь по экономическим показателям: высокая собственная стоимость, высокая стоимость эксплуатации и ремонта, которые неминуемо переносятся на стоимость получаемой на станке детали. До тех пор, пока использование классических приводов с ШВП было оправданно экономически и при этом позволяло добиваться высочайшей точности обработки, инженеры компании лишь присматривались к тому, как покажут себя линейные двигатели применительно к электроэрозионным станкам. В результате решение нашлось. На рынке появился относительно новый тип линейных двигателей — цилиндрический линейный двигатель (ЦЛД), который обладает рядом преимуществ по сравнению с аналогами и весьма эффективен с экономической точки зрения: низкое потребление энергии, простота производства и сборки. Все те недостатки плоских линейных двигателей, рассмотренные выше, не свойственны цилиндрическим .
В 2009 году в производство была запущена серия ультрапрецизионных станков NA с ЦЛД. Эти станки великолепно зарекомендовали себя и заставили задуматься японских специалистов о модернизации и остальных станков, производимых фирмой. В марте 2012 года компания Mitsubishi Electric объявила о начале производства новой серии MV с ЦЛД и продемонстрировала эти станки на выставке «INTERMOLD 2012» в Осаке (Япония). Серия MV призвана заменить прекрасно себя зарекомендовавшие серии FA и BA. Притом, что новые станки обладают великолепными технологическими возможностями и превосходной точностью, главное их преимущество — в экономичности и чрезвычайно низких текущих издержках. Во многом благодаря использованию ЦЛД, станки серии MV потребляют на 69% меньше энергии, чем их предшественники и на 42% позволяют снизить стоимость обработки при 30% сокращении времени! Это действительно потрясающий результат, который позволяет утверждать, что ЦЛД будут и дальше успешно использоваться в станках компании Mitsubishi Electric.
Применение ЦЛД потребовало разработки и применения самой передовой технологии управления с использованием сверхскоростной оптоволоконной связи и системной коммуникацией в режиме реального времени. Безусловно, нас ждет дальнейшее совершенствование конструкции и системы управления, но уже сейчас можно достаточно уверенно утверждать, что применение ЦЛД в электроэрозионных станках — это инновационное решение, которое ознаменовало собой новый этап эволюции в станкостроении.
1.
Введение.
2. Линейный асинхронный
двигатель.
2.1 Конструкция и
принцип действия.
2.2
Разновидности.
2.2.2 Дуговой двигатель.
2.2.3 Трубчатый двигатель.
2.3
Применение.
3. Линейный двигатель
постоянного тока.
3.1 Конструкция
и принцип действия.
3.2
Применение.
4. Линейный синхронный
двигатель.
4.1 Применение.
5.
Вывод.
1. Введение.
Интересные и широкие перспективы
развития электропривода связаны с
применением так называемых линейных
двигателей.
Большое число
производственных механизмов и устройств
имеют поступательное или
возвратно-поступательное движение
рабочих органов (подъёмно-транспортные
машины, механизмы подач различных
станков, прессы, молоты и т.д.). В качестве
привода этих механизмов и устройств
использовались обычные электродвигатели
в сочетании со специальными видами
механических передач (кривошипно-шатунный
механизм, передача винт-гайка),
преобразовавших вращательное движение
рабочего органа.
Линейные
двигатели могут быть асинхронными,
синхронными и постоянного тока,
повторяя по принципу своего действия
соответствующие двигатели вращательного
движения.
2. Линейный асинхронный двигатель.
2.1 Конструкция и принцип действия.
Наибольшее распространение получили асинхронные линейные двигатели. Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать (рис. 1) статор 1 и ротор 4 с обмотками 2 и 3 обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость, как это показано на рисунке. Образовавшаяся «плоская» конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки 2 статора такого двигателя подключить к сети переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью, пропорциональной частоте питающего напряжения и длине полюсного деления. Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки 3 ротора и индуктирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведёт к появлению силы, действующей, по известному правилу Ленца, в направлении перемещения магнитного поля. Ротор – в дальнейшем будем называть его уже вторичным элементом – под действием этой силы начнёт двигаться с некоторым отставанием (скольжением) от магнитного поля, как и в обычном асинхронном двигателе.
2.2 Разновидности.
2.2.1
Конструктивные параметры.
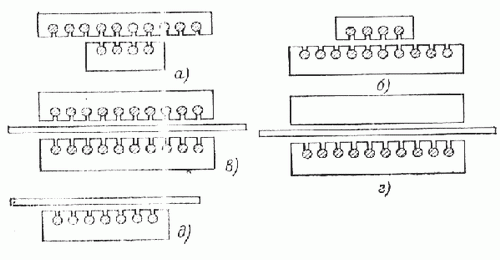
Представленная на рис. 2 конструкция представляет собой линейный двигатель с одинаковыми размерами статора и вторичного элемента. Помимо такой конструкции, в зависимости от назначения линейного двигателя вторичный элемент может быть длиннее статора (рис. 2а) или короче его (рис. 2б). Такие двигатели получили соответственно название двигателей с коротким статором и коротким вторичным элементом. Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Часто – и в этом одно из достоинств линейного асинхронного двигателя – в качестве вторичного элемента используется металлический лист (полоса), как показано на рис. 2д. Вторичный элемент при этом может располагаться также между двумя статорами (рис. 2в) или между статором и ферромагнитным сердечником (рис. 2г). Двигатель с конструктивной схемой, приведённой на рис. 2д, получил название двигателя с односторонним статором, со схемой по рис. 2в – с двусторонним статором и со схемой по рис. 2г – с односторонним статором и сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причём использование не магнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы, как, например, на рис. 2в, г. Некоторое распространение получили сложные составные вторичные элементы с прилегающими друг к другу полосами из немагнитного и ферромагнитного материала, при этом ферромагнитная полоса выполняет роль части магнитопровода. Принцип действия линейных двигателей с вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трёхфазного переменного тока. Отметим, что линейные двигатели очень часто работают в так называемом обращённом режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте.
2.2.2 Дуговой двигатель.
Дуговой двигатель характеризуется
расположением обмотки на части
окружности, как это показано на рис.
3.Особенностью этого двигателя является
зависимость частоты вращения его
статора 1 от длины дуги, на которой
располагаются обмотки 2 статора 3.
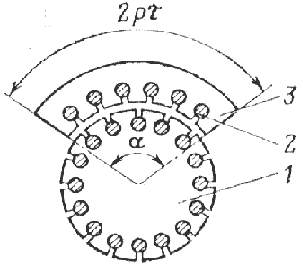
Пусть
обмотки статора располагаются на
дуге, длина которой соответствует
центральному углу α = 2τр, где τ - длина
полюсного деления и p – число пар
полюсов. Тогда за один период тока
вращающееся поле статора совершит
поворот на угол 2τр/р = α/р, а в течение
одной минуты поле повернётся на n
= α/p*60f/2π оборотов, т. е. будет иметь
частоту вращения n, об/мин.
Выбирая различные α, можно выполнять
дуговые двигатели с различными
частотами вращения ротора.
2.2.3 Трубчатый двигатель.
Конструкция трубчатого линейного
двигателя представлена на рис. 4.
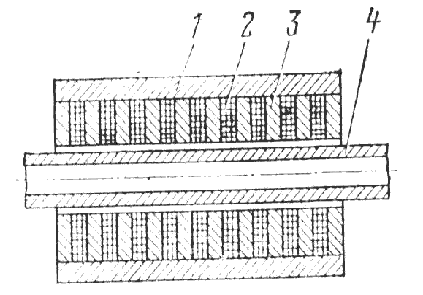
Статор
двигателя 1 имеет вид трубы, внутри
которой располагаются перемежающиеся
между собой плоские дисковые катушки
2 (обмотки статора) и металлические
шайбы 3, являющиеся частью магнитопровода.
катушки двигателя соединяются группами
и образуют обмотки отдельных фаз
двигателя. Внутри статора помещается
вторичный элемент 4 также трубчатой
формы, выполненный из ферромагнитного
материала.
При подключении
к сети обмоток статора вдоль его
внутренней поверхности образуется
бегущее магнитное поле, которое
индуктирует в теле вторичного элемента
токи, направленные по его окружности.
Взаимодействие этих токов с магнитным
полем двигателя создаёт на вторичном
элементе силу, действующую вдоль
трубы, которая и вызывает (при
закрепленном статоре) движение
вторичного элемента в этом направлении.
Трубчатая конструкция линейных
двигателей характеризуется аксиальным
направлением магнитного потока в
отличие от плоского линейного двигателя,
в котором магнитный поток имеет
радиальное направление.
2.3 Применение.
Широкое
применение линейные двигатели нашли
в электрическом транспорте, чему
способствовал целый ряд преимуществ
этих двигателей. Одно из них, уже
отмеченное выше, определяется
прямолинейностью движения вторичного
элемента (или статора), что естественно
сочетается с характером движения
транспортных средств.
Другое,
не менее важное обстоятельство связанно
с независимостью силы тяги от силы
сцепления колёс с рельсовым путём,
что недостижимо длят обычных систем
электрической тяги. Поэтому ускорения
и скорости движения средств транспорта
при использовании линейных двигателей
могут быть сколь угодно высокими и
ограничиваться только комфортабельностью
движения, допустимой скоростью качения
колёс по рельсовому пути и дороге,
динамической устойчивостью ходовой
части транспорта и пути. Исключается
при использовании линейных двигателей
и буксование колёс электрического
транспорта.
Одна из возможных конструктивных схем сочленения линейного двигателя с рельсовым транспортным средством показана на рис. 5.
Линейный двигатель, укреплённый на тележке 3 подвижного состава, имеет конструкцию с двусторонним статором 1. Вторичным элементом является укреплённая между рельсами полоса 2. Напряжение на статор двигателя подаётся с помощью скользящих контактов. Известны также конструкции линейных двигателей, где вторичным элементом являются рельс и элементы несущей конструкции. Такие схемы характерны, в частности, для монорельсовых пассажирских и грузовых дорог и механизмов передвижения кранов. На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении.
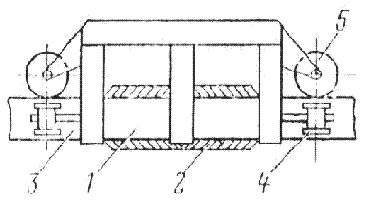
Рис.
6

Рис.
7
На
рис. 7 показан пример использования
линейных асинхронных двигателей для
механизмов транспортировки грузов
различных изделий.
Конвейер,
предназначенный для перемещения
сыпучего материала 1 из бункера 2, имеет
металлическую ленту 3, укреплённую на
барабанах 4. Металлическая лента
проходит внутри статоров 5 линейного
двигателя, являясь вторичным элементом.
Применение линейного двигателя в этом
случае позволяет снизить предварительное
натяжение ленты и устранить её
проскальзывание, повысить скорость
и надёжность работы конвейера.
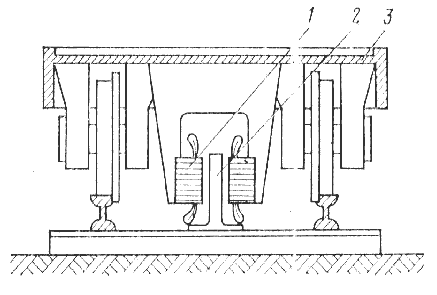
Большой интерес представляет
использование линейного двигателя
для машин ударного действия, например
сваезабивных молотов, применяемых
при дорожных работах и строительстве.
Конструктивная схема такого молота,
показана на рис. 8.Статор линейного
двигателя 1 располагается на стреле
молота 2 и может перемещаться по
направляющим стрелы в вертикальном
направлении с помощью лебёдки 3. Ударная
часть молота 4 является одновременно
вторичным элементом двигателя.
Для подъёма ударной части
молота двигатель включается таким
образом, чтобы бегущее поле было
направленно вверх. При подходе ударной
части к крайнему верхнему положению
двигатель отключается и ударная часть
опускается вниз на сваю под действием
силы тяжести. В некоторых случаях
двигатель не отключается, а реверсируется,
что позволяет увеличить энергию удара.
По мере заглубления сваи статор
двигателя перемещается вниз с помощью
лебёдки.
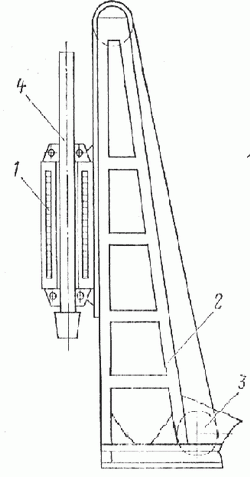
Рис.
8
Электрический молот, прост в изготовлении, не требует повышенной точности изготовления двигателей, не чувствителен к изменению температуры и может вступать в работу практически мгновенно.
3. Линейный двигатель постоянного тока.
Наряду с асинхронными линейными двигателями применяются линейные двигатели постоянного тока. Они чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных пусковых усилий.
3.1 Конструкция и принцип действия.
Линейные электродвигатели постоянного тока состоит из якоря с расположенной на нём обмоткой, служащей одновременно коллектором (направляющий элемент), и разомкнутого магнитопровода с обмотками возбуждения (подвижная часть), расположенными так, что векторы сил, возникающих под полюсами магнитопровода, имеют одинаковое направление. Кроме того, линейные двигатели постоянного тока (как и двигатели вращательного движения) позволяют при необходимости просто регулировать скорость движения рабочих органов.
3.2 Применение.
На рис. 9 показана схема линейного двигателя постоянного тока, который применяется для перемещения промышленных изделий. Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развёрнутый в плоскость.
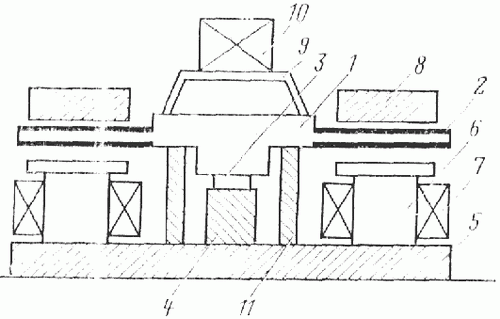
Рис.
9
Подвижная часть двигателя – якорь -
состоит из немагнитного остова 1 и
укреплённой на нём обмотки 2 якоря,
которая может быть выполнена из
изолированного обмоточного провода
или изготовлена из медной фольги путём
её травления. Ширина витков обмотки
в направлении движения, как и в обычных
двигателях постоянного тока, близка
к полюсному делению (т. е. расстоянию
по окружности между полюсами магнитной
системы двигателя). Токопровод к
обмотке осуществляется с помощью
коллектора 3 и щёток 4. На станине
двигателя 5 крепится комплект полюсов
6 с обмотками возбуждения 7, размещённых
в ряд по направлению движения якоря.
Другими частями магнитопровода
двигателя являются стальные сердечники
8 и сама станина, выполненная также из
ферромагнитного материала. Якорь
двигателя вместе со столиком 9 для
крепления перемещаемого изделия 10
движется по неподвижным опорам 11 так,
что его плоскости с обмотками всё
время находятся в зазоре между
сердечниками 8 и полюсами 6. На принципе
работы линейного двигателя основано
действие специальных насосов для
перекачки электропроводящих жидкостей
и в том числе жидких металлов. Такие
насосы, часто называемые
магнитогидродинамическими, широко
применяются в металлургии для
транспортировки, дозировки и
перемешивания жидкого металла, а также
на атомных электростанциях для
перекачки жидкометаллического
теплоносителя.
Магнитогидродинамические насосы (МГД
- насосы) могут быть постоянного или
переменного тока. Рассмотрим схему
насоса постоянного тока.
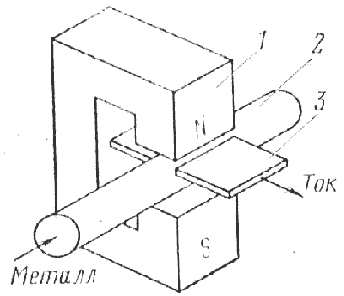
Первичным элементом – статором двигателя является С – образный электромагнит 1. В воздушный зазор электромагнита помещается трубопровод 2 с жидким металлом. С помощью электродов 3, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего устройства. Часто обмотка возбуждения включается последовательно в цепь электродов 3. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила. Под действием этой силы металл начнёт перемещаться по трубопроводу, причём направление его движения просто определить по известному правилу левой руки. Преимуществами МГД – насосов являются отсутствие движущихся механических частей, и возможность герметизации канала транспортировки металла.
4. Линейный синхронный двигатель.
В
последние годы всё шире используются
синхронные линейные двигатели. Основной
областью применения этих двигателей,
где их преимущества проявляются
особенно сильно, является высокоскоростной
электрический транспорт. Дело в том,
что по условиям нормальной эксплуатации
такого транспорта необходимо иметь
сравнительно большой воздушный зазор
между подвижной частью и вторичным
элементом. Асинхронный линейный
двигатель имеет при этом очень низкий
коэффициент мощности, и его применение
оказывается экономически не выгодным.
Синхронный линейный двигатель,
напротив, допускает наличие относительно
большого воздушного зазора между
статором и вторичным элементом и
работает при этом с коэффициентом
мощности, близким к единице.
Следует отметить, что применение
синхронных линейных двигателей в
высокоскоростном транспорте сочетается,
как правило, с так называемой магнитной
подвеской вагонов и применением
сверхпроводящих магнитов и обмоток
возбуждения, что позволяет повысить
комфортабельность движения и
экономические показатели работы
подвижного состава.
4.1 Применение.
На рис. 11 показана схема путепровода и вагона электропоезда со скоростью движения 400 – 500 км/ч, предназначенного для перевозки 100 пассажиров.

Рис.
11
Тяговый
синхронный линейный двигатель имеет
электромагнитное возбуждение с
использованием сверхпроводящих
магнитов. Обмотка возбуждения 1 состоит
из ряда катушек, равномерно укреплённых
под днищем вагона 5. В криогенной
системе охлаждения обмоток используется
жидкий гелий. Плоская трёхфазная
обмотка переменного инвертора,
преобразующего напряжения постоянного
тока в трёхфазное напряжение переменного
тока.
С помощью инвертора
осуществляется пуск, изменение скорости
движения и торможение поезда.
Путепровод 6 представляет собой
бетонное полотно, плоский характер
поверхности которого выбран с целью
снижения накопления льда и снега.
Вагон подвешивается над полотном
дороги на высоте 15 см с помощью
специальной системы магнитной подвески.
Эта система состоит из удлинённых
сверхпроводящих электромагнитов 3,
расположенных по краям днища вагона,
из плоских алюминиевых полос 4,
укреплённых в полотне дороги. Принцип
работы системы магнитной подвески
основывается на действии электродинамических
сил, возникающих при взаимодействии
потоков сверхпроводящих электромагнитов
3 на борту вагона и вихревых токов,
наведённых в алюминиевых полосках 4.
Расчёты показали, что при использовании
магнитной подвески масса вагона
оказывается на 20 т меньше, чем при
системе подвески на воздушной
подушке.
Для обеспечения
поперечной устойчивости поезда при
его движении применяется специальная
система стабилизации. Она предусматривает
укладку дополнительной обмотки вдоль
оси дорожного полотна и основана на
взаимодействии токов в этой обмотке
с полем тяговых электромагнитов.
Разработанная система электрической
тяги с применением описанного выше
синхронного линейного двигателя
отличается хорошими эксплуатационными
показателями, однако для её работы
необходима укладка обмоток в полотно
дороги, что удорожает изготовление
системы и усложняет её обслуживание,
особенно при значительной протяжённости
дороги. В связи с этим были разработаны
конструкции линейных синхронных
двигателей, которые не требуют укладки
обмоток в железнодорожное полотно. К
их числу относятся линейные синхронные
двигатели с так называемым униполярным
возбуждением и когтеобразными полюсами.
Двигатели того и другого исполнения
были использованы для привода 50 –
тонного состава со скоростью движения
480 км/ч.

На
рис. 12 показана схема синхронного
линейного двигателя с униполярным
возбуждением. Двигатель имеет два
статора 1, установленных на подвижной
части состава. Бегущее магнитное поле
создаётся с помощью обмоток 2,
подключаемых к сети переменного тока.
Статоры соединяются магнитопроводом
3, на котором расположена обмотка
униполярного возбуждения 4. Эта обмотка
создаёт постоянный по направлению
магнитный поток, который пронизывает
ферромагнитный вторичный элемент 5,
укладываемый в магнитопровод.
Взаимодействие бегущего магнитного
поля с намагниченным вторичным
элементом создаёт силу тяги подвижного
состава.
Сопоставление линейных
синхронных двигателей с униполярным
возбуждением и когтеобразными полюсами
с асинхронным линейным двигателем на
то же тяговое усилие показало, что
последний имеет худший коэффициент
мощности (около 0,6), более низкий КПД
(около 80%) и большую массу на единицу
мощности двигателя.
5. Вывод.
Применение линейных электродвигателей позволяет упростить или полностью исключить механическую передачу, повысить экономичность и надёжность работы привода и производственного механизма в целом.
6. Список литературы.
1. В.В. Маскаленко,
Электрические двигатели
специального
назначения, Энергоиздат 1981.
2. Кавалёв
Ю.М., Электрические машины, – М.: Энергия,
1989.




