Скольжение асинхронной машины. Скольжение асинхронного двигателя
Cтраница 2
Вт номинальное скольжение приблизительно составляет от 6 до 2 % соответственно.
Определить номинальное скольжение асинхронного трехфазного двигателя, ротор которого вращается с частотой й2900 об / мин, если синхронная частота вращения магнитного поля щ3000 об / мин.
Определить номинальное скольжение асинхронного трехфазного двигателя, ротор которого вращается с частотой п 2900 об / мин, если синхронная частота вращения магнитного поля nl 3000 об / мин.
Величина номинального скольжения зависит от сопротивления ротора. Меньшим номинальным скольжением при одинаковой мощности и числе полюсов обладают обычно двигатели с короткозамкнутым ротором нормального исполнения. У этих двигателей в силу конструктивных особенностей сопротивление ротора имеет относительно меньшую величину, что ведет к уменьшению значений критического скольжения SK [ формула (2 - 39) ] и номинального скольжения SH. По тем же причинам при увеличении мощности двигателя падает величина его номинального скольжения и растет жесткость естественной характеристики. Последнее иллюстрируется кривой рис. 2 - 35, построенной по средним данным для двигателей разной мощности.
Величина номинального скольжения зависит от сопротивления ротора. Наименьшим номинальным скольжением при одинаковой мощности и числе полюсов обладают обычно двигатели с короткозамкнутым ротором нормального исполнения. У этих двигателей в силу конструктивных особенностей сопротивление ротора имеет относительно небольшую величину, что ведет к уменьшению значений критического скольжения SK [ формула (2 - 39) ] и номинального скольжения SH. По тем же причинам при увеличении мощности двигателя уменьшается величина его номинального скольжения и растет жесткость естественной харак-теристики. Последнее иллюстрируется кривой рис. 2 - 35, построенной по средним данным для двигателей разной мощности.
| Теоретическая и практическая кривые зависимости момента асинхронной машины от скольжения.| Кривые зависимости момента асинхронного двигателя от скольжения для роторных клеток различного исполнения. |
Повышение номинального скольжения достигается за счет применения роторных клеток с повышенным сопротивлением.
| Зависимость потребного номинального момента двигателя от момента инерции маховика при различных значениях номинального скольжения. |
Увеличение номинального скольжения связано со снижением средней угловой скорости двигателя шор.
Величина номинального скольжения SH колеблется в пределах от 2 до 12 % в зависимости от номинальной мощности и типа электродвигателя нормального исполнения. Двигатели большей номинальной мощности обычно имеют меньшую величину номинального скольжения.
Увеличение номинального скольжения двигателя может привести как к уменьшению, так и к увеличению максимального усилия в штангах в зависимости от режима помпирования; при этом изменение усилия, обусловленное смягчением характеристики двигателя, оказывается в общем случае небольшим.
Выбор номинального скольжения SH у АКД значительно меньше влияет на величину kn, чем при симметричном питании. Часто для повышения kn надо снижать SH. Однако при т 15 возможны случаи, когда при уменьшении SH кратность пускового момента падает. Это объясняется тем, что при меньших значениях SH эллиптичность поля при пуске оказывается большей. Влияние относительного активного сопротивления статора ps и коэффициента рассеяния невелико и неоднозначно. Обычно, если при симметричном питании критическое скольжение SK 1, кратность пускового момента при росте ps и с немного увеличивается или не изменяется совсем, при SK 1 незначительно уменьшается.
При номинальном скольжении по формулам (11.13) - (11.18) определяют КПД т) Р V (Р А Р в) и номинальный момент Мп.
При номинальном скольжении по формулам (11.13) - (11.18) определяют КПД Ц - РК / (РА РВ) и номинальный момент Мн.
В итоге взаимодействия магнитного поля с токами в роторе асинхронного мотора создается крутящий электрический момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного мотора характеризуется величиной скольжения s = (n1 — n2 ) / n2, где n1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного мотора, об/мин. При работе с номинальной нагрузкой скольжение обычно не достаточно, так для электродвигателя, к примеру, с n1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно:s = ((1500 — 1460) / 1500) х 100 = 2,7%
Асинхронный движок не может достигнуть синхронной скорости вращения даже три отсоединенном механизме, потому что при ней проводники ротора не будут пересекаться магнитным полем, в их не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
 В исходный момент запуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного мотора
: f2 = s х
f1, где f1 — частота тока, подводимого к статору.
В исходный момент запуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного мотора
: f2 = s х
f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора находится в зависимости от частоты тока в нем, при этом чем больше частота, тем больше его индуктивное сопротивление. С повышением индуктивного сопротивления ротора возрастает сдвиг фаз меж напряжением и током в обмотках статора.
При пуске асинхронных движков коэффициент мощности потому существенно ниже, чем при обычной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного мотора с конфигурацией скольжения меняется по сложному закону. При уменьшении скольжения в границах 1 — 0,15 сопротивление возрастает, обычно, менее чем в 1,5 раза, в границах от 0,15 до sн ом в 5-7 раз по отношению к исходному значению при пуске.
Ток по величине меняется назад пропорционально изменению эквивалентного сопротивления Таким макаром, при пуске до скольжения порядка 0,15 ток опадает некординально, а в предстоящем стремительно миниатюризируется.
Момент вращения электродвигателя определяется величиной магнитного потока, током и угловым сдвигом меж ЭДС и током в роторе. Любая из этих величин в свою очередь находится в зависимости от скольжения, потому для исследования рабочих черт асинхронных движков устанавливается зависимость момента от скольжения и воздействия на него подводимого напряжения и частоты.
Момент вращения может быть также определен по электрической мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и назад пропорциональная квадрату частоты.
 Соответствующими значениями момента зависимо от скольжения (либо скорости) являются изначальное значение момента
(когда электродвигатель еще неподвижен), наибольшее значение момента
(и соответственное ему сколь жение, называемое критичным) и малое значение момента в пределе скоростей от недвижного состояния до номинальной
.
Соответствующими значениями момента зависимо от скольжения (либо скорости) являются изначальное значение момента
(когда электродвигатель еще неподвижен), наибольшее значение момента
(и соответственное ему сколь жение, называемое критичным) и малое значение момента в пределе скоростей от недвижного состояния до номинальной
.
З начения момента для номинального напряжения приводятся в каталогах для электронных машин. Познание малого момента нужно при расчете допустимости запуска либо самозапуска механизма с полной нагрузкой механизма. Потому его значение для определенных расчетов должно быть или определено, или получено от завода-поставщика.
Величина наибольшего значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не находится в зависимости от величины сопротивления ротора.
Критичное скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обосновано активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Повышение только активного сопротивления ротора сопровождается повышением критичного скольжения и перемещением максимума момента в область более больших скольжений (наименьшей скорости вращения). Таким методом может быть достигнуто изменение черт моментов.
В асинхронных двига телях с фазным ротором изменение момента при разных скольжениях осуществляется при помощи сопротивления, вводимого в цепь обмотки ротора. В асинхронных движках с короткозамкнутым ротором изменение момента может быть достигнуто за счет внедрения движков с переменными параметрами либо при помощи частотных преобразователей .
Школа для электрика
Ее измеряют тахометром или тахогенератором, который присоединяется непосредственно на валу электродвигателя, а скольжение двигателя определяют по формуле S = (n1 - n2) / n1 , где n1 = 60f /p – синхронная частота вращения; n2 – фактическая частота вращения.
Преимущества этого способа определения скольжения электродвигателя: быстрота измерений и возможность производить их как при неизменной, так и при изменяющейся частоте вращения. К недостаткам такого способа измерения можно отнести невысокую точность обычных тахометров (погрешность 1–8 %) и трудность их градуирования. Кроме того, тахометр не может применяться при испытании электродвигателей малой мощности, так как потери на трение внутри механизма тахометра представляют заметную нагрузку.
Для выполнения различных измерений ручной тахометр обычно снабжается комплектом сменных наконечников различной формы и назначения, надеваемых на конец валика (рис. 1). Из этих наконечников наиболее широко применяется резиновый конус, оправленный в металлический патрон. Все эти наконечники служат для соприкосновения с коническим углублением в торце вала электрической машины. Наконечник с резиновым центром используют при измерении больших частот, со стальным - для малых и средних.
Рис. 1. Общий вид центробежного тахометра типа ИО-10 и тахогенератора: 1 – шкала; 2 – кнопка переключения; 3 – указатель пределов; 4 – циферблат
При наличии углубления по центру вала применяется удлинитель, который надевается на вал тахометра, а соответствующий наконечник – на удлинитель. При отсутствии или недостаточности центров пользуются шкивом, который прижимается боковой поверхностью (резиновым кольцом) к поверхности вращающегося вала.
В соответствии с конкретными условиями измерения выбирают приспособление (удлинитель наконечник). Перед началом измерения удаляют смазку, грязь, пыль из центра углубления или поверхности вала.
Для измерения частоты вращения электродвигателя следует предварительно установить на тахометре необходимый предел измерения. Если порядок измерения частоты неизвестен, то измерение следует начинать с самого высокого предела во избежание порчи тахометра.
Измерение следует производить кратковременно (3–5 с), осторожно прижимая наконечник тахометра к вращающемуся валу с небольшим нажимом так, чтобы ось вала тахометра совпадала с осью измеряемого вала или при пользовании шкивом была параллельной ей.

Если скольжение не превышает 5 %, частота вращения может быть измерена стробоскопическим методом с применением неоновой лампы.
На торце вала двигателя мелом наносят диаметральную черту. Во время работы двигателя ее освещают неоновой лампой, питаемой от сети той же частоты, что и двигатель. Наблюдатель видит на торце вала не черту, а звезду, медленно вращающуюся против направления вращения вала. Количество лучей звезды зависит от числа пар полюсов двигателя и от положения неоновой лампы. Если свет от обоих электродов лампы падает на торец вала, число лучей кажущейся звезды равно 2р. Если же торец вала с нанесенной меловой чертой освещается только одним электродом, число лучей кажущейся звезды равно числу пар полюсов.
За время t (обычно 30 с), измеряемое секундомером, подсчитывается количество лучей кажущейся звезды m, прошедших через вертикальное положение. Поскольку число лучей кажущейся звезды равно 2р, скольжение
![]()
где f1 – частота сети, питающей неоновую лампу.
При f1= 50 Гц.
![]()
Другой вариант стробоскопического метода заключается в следующем. На валу двигателя с торцовой стороны укрепляют один из дисков (рис. 2 ). Собирают схему (рис. 3 ). У двухполюсной машины на валу закрепляют диск, обозначенный как 2р = 2, и освещают его неоновой лампой с пятачковым электродом.

Рис. 2 . Изображение стробоскопических дисков в зависимости от количества пар полюсов асинхронного электродвигателя
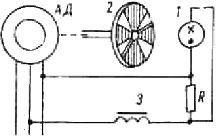
Рис. 3 . Схема включения неоновой лампы для стробоскопического метода определения скольжения:1 – неоновая лампа, 2 – стробоскопический диск, 3 – индукционная катушка
Ротор вращается несинхронно и отстает от поля, так что виден диск, медленно вращающийся в сторону, противоположную вращению ротора. Если за время t мимо неподвижной точки (стрелки, укрепленной на подшипнике) проходит m черных секторов, значение скольжения определяется по выражению
![]()
Счет проходящих мимо неподвижной точки секторов следует начинать не с момента пуска секундомера, а со следующего прохождения метки.
Для получения резкости изображения на лампу следует подавать напряжение, кривая изменения которого показана на рис. 4 . Лампа зажигается в тот момент, когда напряжение на ее зажимах достигает значения, называемого порогом зажигания.
Рис. 4
Определение скольжения двигателя с помощью индукционной катушки. Этот метод основан на контроле частоты вращения потоков рассеивания ротора Фр (рис. 5 ), которые с частотой, пропорциональной скольжению, пересекают витки индукционной катушки.
Рис. 5. Схема измерения скольжения ротора асинхронного электродвигателя с помощью индукционной катушки
К выводам катушки подключают чувствительный милливольтметр (желательно с нулем посредине шкалы); катушку располагают у конца вала ротора. Поворачивая катушку в разные стороны, находят положение, при котором наблюдаются максимальные колебания стрелки прибора. По числу полных колебаний k за время t рассчитывают значение скольжения
а при f = 50 Гц.
В качестве индукционной катушки можно использовать катушку реле или контактора постоянного тока, имеющую 10–20 тыс. витков (или намотать катушку с числом витков не менее 3000). Для усиления магнитного потока в катушку вставляют сердечник, набираемый из нескольких полос трансформаторной стали. Метод индукционной катушки весьма прост и пригоден для всех видов машин.
У асинхронных электродвигателей с фазным ротором помимо описанных выше способов скольжение может быть определено с помощью магнитоэлектрического амперметра, включаемого в одну из фаз ротора, а при наличии невыключаемого сопротивления в цепи ротора - с помощью вольтметра, присоединенного к кольцам ротора. Рекомендуется применять приборы с двусторонней шкалой. Скольжение асинхронного электродвигателя рассчитывается по числу полных колебаний стрелки прибора, так же как при использовании метода с индукционной катушкой.

Принцип действия асинхронной машины рассмотрим на примере двигателя с короткозамкнутым ротором и двухполюсным статором. Трехфазный ток в обмотке статора создает вращающееся магнитное поле. Скорость вращения n 0 направлена по часовой стрелке.
В момент включения ротор неподвижен, вращающееся магнитное поле наведет в его проводниках электродвижущую силу, и в короткозамкнутых витках ротора потекут токи, взаимодействующие с вращающимся магнитным полем.
Направление индуктивных токов можно определить по правилу правой руки, учитывая тот факт, что скорость движения проводников ротора относительно поля статора направлена противоположно скорости поля статора. Токи в роторе взаимодействуют с полем статора электромагнитными силами (по закону Ампера).
Направление этой силы можно определить с помощью правила левой руки силы F к F" создадут пусковой момент, стремящийся повернуть ротор в сторону движения магнитного поля. Если электромагнитный момент, действующий на неподвижный ротор, превысит тормозной момент на валу, то ротор начнет ускоренно двигаться в направлении магнитного поля машины. При увеличении скорости ротора n, относительная скорость его (относительно поля машины) n 0 - n будет уменьшаться, значит, уменьшится и сила тока в роторе, так как ЭДС индукции в движущемся проводнике пропорционально его скорости e = BlƲ, а индукционный ток пропорционален ЭДС i~е.
Ток прекратит изменяться, когда наступит равновесие между моментом электромагнитных сил и тормозным моментом на валу двигателя. Теперь ротор будет вращаться с постоянной скоростью n , и токи, создающиеся в его проводниках, установятся такие, которые будут способны создать вращающий электромагнитный момент, равный тормозному.
Таким образом, принцип работы асинхронного двигателя основан на взаимодействии вращающегося магнитного поля стоками, которые наводятся этим полем в проводниках ротора. Возникновение токов в роторе возможно лишь при относительном движении проводников ротора в магнитном поле машины. Ротор и магнитное поле статора в асинхронном двигателе вращаются в одну сторону, но с разными скоростями. При анализе работы асинхронных машин пользуются безразмерной величиной, называемой скольжением s и определяемым отношением разности скоростей вращения магнитного поля и ротора к скорости вращения магнитного поля
Из этого выражения следует: n=(l-s)n 0 .
При пуске двигателя n=0, s=1
, а при вращении ротора со скоростью, равной скорости поля статора n=n 0 , s=0
. В этом случае магнитное поле ротора неподвижно относительно вращающегося магнитного поля статора. Токи в роторе индуктироваться не будут, значит, не будут возникать силы взаимодействия магнитного поля с проводниками ротора и электромагнитный момент тоже будет ранен нулю М = 0
. Такой скорости двигатель достичь не может, значит, у асинхронного двигателя 0
Конец работы -
Эта тема принадлежит разделу:
Федеральное государственное автономное образовательное учреждение... высшего профессионального образования... Национальный исследовательский ядерный университет МИФИ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ:
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Все темы данного раздела:
Сопротивление проводников. Закон Ома
В металлах электроны находятся в состоянии хаотического движения, интенсивность которого пропорциональна температуре проводника и зависит от структуры кристаллической решетки. Если к проводнику при
Энергетический баланс
Энергия, затрачиваемая на перемещение заряда qмежду двумя точками неразветвленной электрической цепи: W = q·U.
При постоянном токе величина перенесенного заряда: q = I·t, следова
Эквивалентные преобразования
Последовательным соединением элементов цепи называют такое, при котором конец предыдущего соединен с началом последующего. В одной точке последовательно могут быть соединены только два элеме
Закон Кирхгофа
Два закона Густава Кирхгофа, открытые в 1845году, определяют параметры режима работы электрической цепи – ток I и напряжение U.
Первый закон Кирхгофа: алгебраическая сумма токов, сходящихс
Потеря напряжения в линиях электропередачи
Расчет проводов на потерю напряжения имеет важное практическое значение. При таком расчете задано напряжение на зажимах источника Uист., расстояние от источника до приемника электроэнерг
Принцип получения синусоидальной ЭДС
Переменный ток широко используется во всех отраслях народного хозяйства. Это обусловлено следующими факторами:
· генераторы переменного тока значительно проще, экономичнее и надежнее источ
Параметры переменного тока
Значение синусоидального тока в любой момент времени полностью характеризуется пятью параметрами: амплитудой, периодом, частотой, начальной фазой и круговой частотой.
(2.6)
Резистивный, индуктивный и емкостный элементы в цепях синусоидального тока
В любой электрической цепи может происходить три энергетических процесса:
· преобразование электрической энергии в другие виды (механическую, лучистую, тепловую);
· обмен электром
Назначение трансформаторов
Трансформатором называют электромагнитный аппарат, предназначенный для преобразования одного переменного напряжения в другое, при этом сохраняется частота.
Применение трансформаторов в сил
Устройство и принцип действия трансформаторов
Принципиальная схема трансформатора изображена на (рис. 5.1). На замкнутом ферромагнитном сердечнике закреплены две обмотки, одна из которых (первичная) подключена к источнику синусоидального напря
Уравнение электрического состояния трансформатора
Согласно второму закону Кирхгофа, напряжение u1, приложенное к первичной цепи уравновешивается противо ЭДС рабочего магнитного потока первичной обмотки- e1, ЭДС рассеяния -
Уравнение магнитного состояния
Магнитный поток Ф = Фmax sinωt определяет величину напряженности поля H(t) в сердечнике в любой момент времени, т.к. эти две величины связаны между собой
Векторная диаграмма трансформатора
При построении векторной диаграммы воспользуемся уравнением электрического и магнитного состояния трансформатора
где
где
и складываем вект
Опыт холостого хода трансформатора
Рис. 5.4
Холостой ход - это режим работы трансформатора при разомкнутой вторичной цепи, В этом случае полезная мощность, ток очень мал (2-10% от) поэтому потерями в перв
Опыт короткого замыкания
Короткое замыкание - режим работы трансформатора при Zн=0. При номинальном входном напряжении этот режим является аварийным, т.к. токи в обмотках превысят номинальные в десятки раз.
Потери мощности. КПД трансформатора
КПД трансформатора определяется отношением активной мощности нагрузки Р2 к потребляемой активной мощности. В номинальном режиме при cosφ2= 0,8 КПД очень высок и со
Устройство асинхронного двигателя
Асинхронная машина состоит из двух основных частей:
а) неподвижная часть - статор,
в) подвижная часть - ротор.
Сердечник статора и ротора собраны из листовой электротехни
Вращающееся магнитное поле
Трехфазная обмотка статора асинхронного двигателя получает энергию от трехфазной сети. Ее назначение - создать в магнитной цепи вращающееся магнитное поле. Для создания двухполюсного вращающегося м
Частота тока ротора. Скорость вращения поля ротора.
При вращении ротора в сторону вращение магнитного поля машины частота пересечения полем проводников пропорциональна разности скоростей (n0 -n) и
частота тока в обмотке ро
ЭДС и токи в обмотках статора
Магнитная индукция распределена в воздушном зазоре машины по закону синуса. Ширина витка фазы обмотки равна полюсному делению.
Тогда ЭДС, наведенная в этом витке
здесь l -
ЭДС и токи в обмотках ротора и их зависимость от скольжения.
В обмотке вращающегося ротора рабочий магнитный поток наводит ЭДС, действующее значение которого Е2, зависит от скорости движения поля относительно проводников ротора E2
Векторная диаграмма асинхронного двигателя.
Так как фазы статора и ротора симметричны, векторную диаграмму строят для одной фазы двигателя. При вращающемся роторе частота тока в обмотке статора ƒ=50Гц во много раз превышает часто
Преобразование энергии в асинхронном двигателе. КПД.
Асинхронный двигатель является активно - индуктивным потребителем энергии. Его полная мощность равна S=P1+jQ1=3U1I1cosφ1+j3U1
Коэффициент мощности и рабочие характеристики асинхронного двигателя.
Ранее говорилось о большом народнохозяйственном значении коэффициента мощности энергоустановок, повышение которого необходимо для лучшего использования энергетического оборудования генераторов, тра
Зависимость электромагнитного момента от скольжения и напряжения сети. Механическая характеристика.
Для устойчивой работы двигателя необходимо, чтобы автоматически устанавливалось равновесие вращающего и тормозного момента на валу. С увеличением нагрузки на валу двигателя соответственно должен ув
Пуск в ход асинхронных двигателей.
В процессе пуска двигателя на ротор машины действуют тормозной и инерционные моменты, которые должны быть преодолены вращающим моментом. Кроме того, при пуске двигателя при номинальном напряжении в
Регулирование скорости вращения ротора.
Скорость вращения ротора
Регулирование скорости осуществляется либо изменением скольжения, либо изменением частоты питающей сети или числа пар полюсов. Изменение скольжения достигается вкл
Работа асинхронной машины в режиме генератора и электромагнитного тормоза.
Устройство синхронных машин.
Принцип действия синхронного генератора.
Уравнение электрического состояния фазы синхронного генератора. Векторная диаграмма.
Принцип действия синхронного двигателя.
Уравнение электрического состояния и векторная диаграмма синхронного двигателя.
Угловая и механическая характеристика синхронного двигателя.
Влияние величины тока возбуждения на коэффициент мощности.
В процессе взаимодействия магнитного поля и тока в роторе асинхронного электродвигателя создается вращающий момент, который позволяет уровнять скорость статора, ротора и вращения электромагнитного поля. Величина скольжения характеризуется скоростью вращения ротора, статора и магнитного поля. Предопределяющим моментом в прямой зависимости от скольжения является начальное значение того момента, когда электродвигатель остается еще в неподвижном состоянии. Максимальное значение скольжения называется критическим. Конкретные расчеты производят специалисты завода-изготовителя, и они указаны в соответствующих технических характеристиках, прилагаемых к электродвигателю при покупке. При увеличении активного сопротивления только ротора увеличивается значение критического скольжения и уменьшается скорость вращения вала. Изменить данные параметры можно путем использования дополнительного сопротивления, которое вводится в цепь обмотки ротора.
Известно, что при работе асинхронной машины в режиме двигателя скольжения, изменяется от нуля до единицы 0
Современные синхронные машины выполняются в основном с подвижной магнитной системой и неподвижной рабочей обмоткой. Такая конструкция целесообразна, так как проста в исполнении. Кроме того, напряже
Если обмотку возбуждения синхронного генератора подключить к источнику постоянного тока, то намагничивающей силой обмотки возбуждения будет создано основное магнитное поле, характеризуемое, магнитн
ЭДС, индуктированная в фазной обмотке статора потоком Ф0 может быть представлена в виде суммы Ė0=Ů+İ(r0+j(xрас+xπ
При работе синхронной машины в качестве двигателя обмотка якоря подключается к источнику переменного тока, в результате чего возникает магнитный поток якоря Фя. После разгона рото
При составлении уравнения электрического состояния цепи якоря синхронного двигателя необходимо учесть напряжение на зажимах фазы статора U, ЭДС фазы статора, возбуждаемую потоком Фо,
Электромагнитный момент ротора
Так как К.П.Д. синхронных двигателей очень высок можно считать Р2=P1, тогда
Опустим пер
При увеличении тормозного момента увеличивается мощность синхронного двигателя P2=Mcɷ и угол рассогласования Ɵ, что понижает запас устойчивости двигатеОт чего зависит величина скольжения электродвигателя
Определение величины скольжения электродвигателя




