Čo je lineárny motor. Lineárne motory
V našich bežných motoroch vnútorné spaľovanie počiatočným článkom sú piesty, ktoré sa zaväzujú. Potom sa tento pohyb pomocou kľukového mechanizmu premení na rotačný. V niektorých zariadeniach vykonáva prvý a posledný článok rovnaký druh pohybu.
Napríklad v motor-generátore nie je potrebné najprv previesť vratný pohyb na rotačný a potom v generátore z tohto rotačný pohyb extrahovať priamočiaru zložku, to znamená urobiť dve opačné transformácie.
Moderný vývoj technológie elektronického prevodu umožňuje prispôsobiť výstupné napätie lineárneho elektrického generátora spotrebiteľovi, čo umožňuje vytvoriť zariadenie, v ktorom časť uzavretého elektrického obvodu nevykonáva rotačný pohyb v magnetickom poli, ale vratný pohyb spolu s ojnicou spaľovacieho motora. Schémy vysvetľujúce princíp činnosti tradičného a lineárneho generátora sú znázornené na obr. jeden.
V bežnom generátore sa na získanie napätia používa drôtený rám, ktorý sa otáča v magnetickom poli a je poháňaný externým pohonným zariadením. V navrhovanom generátore sa drôtová slučka pohybuje lineárne v magnetickom poli. Tento malý a bezzásadový rozdiel umožňuje výrazne zjednodušiť a znížiť náklady na ťahač, ak sa použije spaľovací motor.
Tiež v piestovom kompresore poháňanom o piestový motor, vykoná vstupný a výstupný spoj, obr. 2.
Výhody lineárneho motora
Malé rozmery a hmotnosť, kvôli nedostatku kľukového mechanizmu. Vysoká MTBF kvôli absencii kľukového mechanizmu a kvôli prítomnosti iba pozdĺžneho zaťaženia. nízka cena, kvôli nedostatku kľukového mechanizmu. Vyrobiteľnosť - na výrobu dielov sú potrebné iba pracovne náročné operácie, sústruženie a frézovanie. Schopnosť prejsť na iný druh paliva bez zastavenia motora.
Riadenie zapaľovania pomocou tlaku pri stláčaní pracovnej zmesi
Aby bežný motor dodával elektrické napätie (prúd) do zapaľovacej sviečky, musia byť splnené dve podmienky:
Prvá podmienka je určená kinematikou kľukového mechanizmu - piest musí byť v hornej úvrati (ignoruje sa časovanie zapaľovania);
Druhá podmienka je určená termodynamickým cyklom – tlak v spaľovacej komore, pred pracovným cyklom, musí zodpovedať použitému palivu.
Je veľmi ťažké splniť obe podmienky súčasne. Pri stláčaní vzduchu alebo pracovnej zmesi uniká stlačiteľný plyn v spaľovacej komore cez piestne krúžky atď. Čím pomalšia kompresia nastáva (čím pomalšie sa otáča hriadeľ motora), tým vyšší je únik. V tomto prípade je tlak v spaľovacej komore pred pracovným cyklom nižší ako optimálny a pracovný cyklus prebieha za neoptimálnych podmienok. Koeficient užitočná akcia poklesne motor. To znamená, že je možné zabezpečiť vysokú účinnosť motora iba v úzkom rozsahu otáčok výstupného hriadeľa.
Preto je napríklad účinnosť motora na stojane približne 40% a v reálnych podmienkach, autom, s rôzne režimy pohyb, táto hodnota klesne na 10 ... 12%.
V lineárnom motore nie je kľukový mechanizmus, takže prvá podmienka nemusí byť splnená, nezáleží na tom, kde sa nachádza piest pred pracovným cyklom, záleží len na tlaku plynu v spaľovacej komore pred pracovným cyklom. Ak je teda prívod elektrického napätia (prúdu) do zapaľovacej sviečky riadený nie polohou piestu, ale tlakom v spaľovacej komore, potom pracovný cyklus (zapaľovanie) začne vždy pri optimálny tlak, bez ohľadu na frekvenciu motora, obr. 3.
Takže v akomkoľvek prevádzkovom režime lineárneho motora budeme mať maximálnu oblasť slučky termodynamického Carnotovho cyklu a vysokú účinnosť pri rôznych prevádzkových režimoch motora.
Ovládanie zapaľovania pomocou tlaku v spaľovacej komore umožňuje aj „bezbolestný“ prechod na iné druhy paliva. Napríklad pri prechode z paliva s vysokým oktánovým číslom na palivo s nízkym oktánovým číslom je v lineárnom motore potrebné prikázať systému zapaľovania, aby do zapaľovacej sviečky dodal elektrické napätie (prúd) pri nižšom tlaku. V bežnom motore by na to bolo potrebné zmeniť geometrické rozmery piestu alebo valca.
Je možné realizovať riadenie zapaľovania tlakom vo valci pomocou piezoelektrickej alebo kapacitnej metódy merania tlaku.
Snímač tlaku je vyrobený vo forme podložky, ktorá je umiestnená pod maticou hlavy valcov, obr. 3. Sila tlaku plynu v kompresnej komore pôsobí na snímač tlaku, ktorý je umiestnený pod maticou hlavy valca. A informácie o tlaku v kompresnej komore sa prenášajú do riadiacej jednotky časovania zapaľovania. S tlakom v komore zodpovedajúcim zápalnému tlaku dané palivo, napája systém zapaľovania elektrické napätie(prúd) k zapaľovacej sviečke. Pri prudkom zvýšení tlaku, ktorý zodpovedá začiatku pracovného cyklu, zapaľovací systém odoberá elektrické napätie (prúd). Ak po vopred stanovenom čase nedôjde k zvýšeniu tlaku, čo zodpovedá absencii začiatku pracovného cyklu, zapaľovací systém vydá riadiaci signál na spustenie motora. Taktiež výstupný signál snímača tlaku vo valci sa používa na určenie frekvencie motora a jeho diagnostiky (detekcia kompresie atď.).
Kompresná sila je priamo úmerná tlaku v spaľovacej komore. Potom, čo tlak v každom z protiľahlých valcov nie je nižší ako stanovený (v závislosti od typu použitého paliva), riadiaci systém vydá príkaz na zapálenie horľavej zmesi. Ak je potrebné prejsť na iný druh paliva, zmení sa hodnota nastaveného (referenčného) tlaku.
Tiež časovanie zapaľovania horľavej zmesi je možné nastaviť automaticky, ako pri bežnom motore. Na valci je umiestnený mikrofón - snímač klepania. Mikrofón prevádza mechanické zvukové vibrácie tela valca na elektrický signál. Digitálny filter extrahuje harmonickú (sínusovú vlnu) zodpovedajúcu detonačnému režimu z tejto sady súčtu sínusoidov elektrického napätia. Keď sa na výstupe filtra objaví signál zodpovedajúci vzhľadu detonácie v motore, riadiaci systém zníži hodnotu referenčného signálu, ktorá zodpovedá zápalnému tlaku horľavej zmesi. Ak nie je signál zodpovedajúci detonácii, riadiaci systém po chvíli zvýši hodnotu referenčného signálu, ktorá zodpovedá zápalnému tlaku horľavej zmesi, až kým sa neobjavia frekvencie predchádzajúce detonácii. Opäť, keď sa vyskytujú frekvencie pred klepaním, systém znižuje referenčnú hodnotu zodpovedajúcu poklesu zapaľovacieho tlaku na zapaľovanie bez klepania. Systém zapaľovania sa teda prispôsobuje druhu použitého paliva.
Princíp činnosti lineárneho motora
Princíp činnosti lineárneho, ale aj bežného spaľovacieho motora je založený na efekte tepelná rozťažnosť plyny vznikajúce pri spaľovaní zmes paliva a vzduchu a zabezpečenie pohybu piesta vo valci. Ojnica prenáša priamočiary vratný pohyb piesta na lineárny elektrický generátor alebo piestový kompresor.
Ryža. 4, pozostáva z dvoch párov piestov pracujúcich v protifáze, čo umožňuje vyváženie motora. Každý pár piestov je spojený ojnicou. Ojnica je zavesená na lineárnych ložiskách a môže voľne kmitať spolu s piestami v skrini generátora. Piesty sú umiestnené vo valcoch spaľovacieho motora. Valce sa preplachujú cez preplachovacie okienka pôsobením malého pretlaku vytvoreného v predvtokovej komore. Na ojnici je pohyblivá časť magnetického obvodu generátora. Budiace vinutie vytvára magnetický tok potrebný na generovanie elektrického prúdu. Pri vratnom pohybe ojnice, a tým aj časti magnetického obvodu, prechádzajú čiary magnetickej indukcie vytvorené budiacim vinutím cez stacionárne výkonové vinutie generátora a indukujú v ňom elektrické napätie a prúd (s uzavretým elektrický obvod).
|
|
| Ryža. štyri.. |
Lineárny kompresor, obr. 5, pozostáva z dvoch párov piestov pracujúcich v protifáze, čo umožňuje vyváženie motora. Každý pár piestov je spojený ojnicou. Ojnica je zavesená na lineárnych ložiskách a môže voľne oscilovať s piestami v puzdre. Piesty sú umiestnené vo valcoch spaľovacieho motora. Valce sa preplachujú cez preplachovacie okienka pôsobením malého pretlaku vytvoreného v predvtokovej komore. Pri vratnom pohybe ojnice a spolu s ňou piestov kompresora sa do prijímača kompresora privádza vzduch pod tlakom.
|
|
| Ryža. 5. Lineárny kompresor. |
Pracovný cyklus v motore prebieha v dvoch cykloch.
2. Zdvih zdvihu. Keď je piest blízko hornej úvrati, stlačený pracovná zmes zapálené elektrickou iskrou zo sviečky, v dôsledku čoho sa prudko zvýši teplota a tlak plynov. Pod vplyvom tepelnej rozťažnosti plynov sa piest pohybuje do dno mŕtvy bodu, zatiaľ čo expandujúce plyny vytvárajú užitočná práca. Súčasne piest vytvára vysoký tlak vo vstupnej komore. Pod tlakom sa ventil uzavrie, čím sa zabráni vstupu vzduchu do sacieho potrubia.
Ventilačný systém
Počas pracovného zdvihu vo valci, obr. 6 pracovného zdvihu sa piest pôsobením tlaku v spaľovacej komore pohybuje v smere šípky. Pôsobením nadmerného tlaku v predtlakovej komore sa ventil uzavrie a tu sa stlačí vzduch, aby sa valec odvetrával. Keď piest (kompresné krúžky) dosiahne preplachovacie okienka, obr. 6 ventilácia, tlak v spaľovacej komore prudko klesá a potom sa piest s ojnicou pohybuje zotrvačnosťou, to znamená, že hmotnosť pohyblivej časti generátora hrá v bežnom motore úlohu zotrvačníka. Súčasne sa úplne otvoria preplachovacie okná a vzduch stlačený v predvtokovej komore pod vplyvom tlakového rozdielu (tlak v predvtokovej komore a atmosférický tlak) prečistí valec. Ďalej sa počas pracovného cyklu v opačnom valci uskutočňuje kompresný cyklus.
Keď sa piest pohybuje v režime kompresie a kompresie, obr. 6 kompresie, preplachovacie okienka sú uzatvorené piestom, vstrekuje sa kvapalné palivo, v tomto momente je vzduch v spaľovacej komore na začiatku kompresného cyklu pod miernym pretlakom. Pri ďalšom stláčaní, akonáhle sa tlak stlačiteľnej horľavej zmesi vyrovná referenčnému (nastavenému pre daný druh paliva), na elektródy zapaľovacej sviečky sa privedie elektrické napätie, zmes sa zapáli, pracovný cyklus začne a proces sa bude opakovať. V tomto prípade sa spaľovací motor skladá len z dvoch koaxiálnych a protiľahlo uložených valcov a piestov navzájom mechanicky spojených.
Palivové čerpadlo
Pohonná jednotka palivové čerpadlo lineárny elektrický generátor, je vačkový povrch vložený medzi valček piestu čerpadla a valček krytu čerpadla, obr. 7. Plocha vačky sa vratne pohybuje s ojnicou spaľovacieho motora a pri každom zdvihu odtláča piest a valčeky čerpadla, pričom piest čerpadla sa pohybuje vzhľadom na valec čerpadla a časť paliva je vytláčaná do vstrekovacej trysky paliva, na začiatku kompresného cyklu. Ak je potrebné zmeniť množstvo paliva vypusteného za cyklus, povrch vačky sa pootočí vzhľadom na pozdĺžnu os. Keď sa povrch vačky otáča vzhľadom na pozdĺžnu os, valce piestu čerpadla a valčeky puzdra čerpadla sa budú pohybovať od seba alebo posúvať (v závislosti od smeru otáčania) v rôznych vzdialenostiach, zdvih piestu palivového čerpadla sa zmení a časť vypustené palivo sa zmení. Otáčanie vratnej vačky okolo jej osi sa uskutočňuje pomocou pevného hriadeľa, ktorý je v zábere s vačkou prostredníctvom lineárneho ložiska. Vačka sa teda pohybuje tam a späť, zatiaľ čo hriadeľ zostáva nehybný. Keď sa hriadeľ otáča okolo svojej osi, povrch vačky sa otáča okolo svojej osi a mení sa zdvih palivového čerpadla. Hriadeľ na výmenu časti vstrekovania paliva je poháňaný krokovým motorom alebo ručne.
Pohon palivového čerpadla lineárneho kompresora je tiež vačkový povrch vložený medzi rovinu piesta čerpadla a rovinu skrine čerpadla, obr. 8. Plocha vačky vykonáva vratný rotačný pohyb spolu s hriadeľom synchronizačného ozubeného kolesa spaľovacieho motora a tlačí roviny piestu a čerpadla pri každom zdvihu, zatiaľ čo piest čerpadla sa pohybuje vzhľadom na valec čerpadla a časť palivo sa vypustí do vstrekovacej dýzy paliva na začiatku kompresného cyklu. Pri prevádzke lineárneho kompresora nie je potrebné meniť množstvo vstrekovaného paliva. Prevádzka lineárneho kompresora je zahrnutá iba v tandeme s prijímačom - zariadením na ukladanie energie, ktoré dokáže vyhladiť špičky maximálne zaťaženie. Preto je vhodné uviesť motor lineárneho kompresora len do dvoch režimov: režim optimálneho zaťaženia a režim optimálneho zaťaženia nečinný pohyb. Prepínanie medzi týmito dvoma režimami sa vykonáva pomocou elektromagnetických ventilov, riadiaceho systému.
Spúšťací systém
Štartovací systém lineárneho motora sa vykonáva ako v bežnom motore pomocou elektrického pohonu a zariadenia na ukladanie energie. Bežný motor sa štartuje pomocou štartéra (elektrický pohon) a zotrvačníka (zásobník energie). Lineárny motor sa spúšťa pomocou lineárneho elektrického kompresora a štartovacieho prijímača, obr. 9.
|
|
| Ryža. 9. Štartovací systém. |

Pri štartovaní sa piest štartovacieho kompresora, keď je privedený výkon, pohybuje progresívne v dôsledku elektromagnetického poľa vinutia a potom sa vracia do pôvodného stavu pomocou pružiny. Po načerpaní prijímača až na 8 ... 12 atmosfér sa napájanie zo svoriek štartovacieho kompresora odstráni a motor je pripravený na spustenie. Štartovanie sa vykonáva prihláškou stlačený vzduch do predvtokových komôr lineárneho motora. Prívod vzduchu sa uskutočňuje pomocou solenoidových ventilov, ktorých činnosť je riadená riadiacim systémom. Keďže riadiaci systém nemá informácie o polohe ojníc motora pred naštartovaním, potom dodávaním vysokého tlaku vzduchu do predštartovacích komôr, napríklad vonkajších valcov, sa piesty zaručene dostanú do pôvodného stavu pred štartom. štartovanie motora. Potom sa do predstokových komôr stredných valcov privádza vysoký tlak vzduchu, čím sa valce pred spustením odvetrajú. Potom sa do predštartovacích komôr vonkajších valcov opäť privedie vysoký tlak vzduchu, aby sa motor naštartoval. Hneď ako začne pracovný cyklus (snímač tlaku bude ukazovať vysoký tlak v spaľovacej komore zodpovedajúci pracovnému cyklu), riadiaci systém pomocou solenoidových ventilov zastaví prívod vzduchu zo štartovacieho prijímača.
Synchronizačný systém
Synchronizácia činnosti ojníc lineárneho motora sa vykonáva pomocou synchronizačného prevodu a dvojice ozubených hrebeňov, obr. 10 pripevnený k pohyblivej časti magnetického obvodu generátora alebo piestov kompresora. Ozubené koleso je zároveň pohonom olejova pumpa, pomocou ktorého sa vykonáva nútené mazanie uzlov trecích častí lineárneho motora.
Zníženie hmotnosti magnetického obvodu a obvodu na zapínanie vinutí elektrického generátora.
Generátor lineárneho plynového generátora je synchrónny elektrický stroj. V bežnom generátore sa rotor otáča a hmotnosť pohyblivej časti magnetického obvodu nie je kritická. V lineárnom generátore sa pohyblivá časť magnetického obvodu vratne pohybuje spolu s ojnicou spaľovacieho motora a vysoká hmotnosť pohyblivej časti magnetického obvodu znemožňuje činnosť generátora. Je potrebné nájsť spôsob, ako znížiť hmotnosť pohyblivej časti magnetického obvodu generátora.
|
|
| Ryža. 11. Generátor. |
Pre zmenšenie hmotnosti pohyblivej časti magnetického obvodu je potrebné zmenšiť jej geometrické rozmery, resp. sa zmenší objem a hmotnosť, obr. 11. Potom však magnetický tok pretína len vinutie v jednom páre okienok. z piatich, to je ekvivalentné magnetickému toku prechádzajúcemu vodičom päťkrát kratším, respektíve a výstupné napätie (výkon) sa zníži 5-krát. Na kompenzáciu poklesu napätia generátora je potrebné pridať počet závitov v jednom okne, aby dĺžka vodiča silového vinutia bola rovnaká ako v pôvodnej verzii generátora, obr.
Ale aby väčší počet zákrut ležal v okne s nezmenenými geometrické rozmery, je potrebné zmenšiť prierez vodiča.
Pri konštantnom zaťažení a výstupnom napätí sa tepelné zaťaženie pre takýto vodič v tomto prípade zvýši a stane sa viac ako optimálnym (prúd zostáva rovnaký a prierez vodiča sa zmenšil takmer 5-krát). To by bol prípad, keď sú okenné vinutia zapojené do série, to znamená, keď záťažový prúd preteká všetkými vinutiami súčasne, ako pri bežnom generátore. Ale ak len vinutie dvojice okien je striedavo pripojené k záťaži, ktorá v tento moment prekročí magnetický tok, potom sa toto vinutie v takom krátkom čase nestihne prehriať, pretože tepelné procesy sú zotrvačné. To znamená, že je potrebné striedavo pripojiť k záťaži iba tú časť vinutia generátora (pár pólov), ktorú pretína magnetický tok, zvyšok času by sa mal ochladiť. Záťaž je teda vždy zapojená do série len s jedným vinutím generátora. V tomto prípade efektívna hodnota prúdu pretekajúceho vinutím generátora nepresiahne optimálnu hodnotu z hľadiska ohrevu vodiča. Takto je možné výrazne, viac ako 10-krát, znížiť hmotnosť nielen pohyblivej časti magnetického obvodu generátora, ale aj hmotnosti pevnej časti magnetického obvodu. Vinutia sa spínajú pomocou elektronické kľúče. Ako kľúče na striedavé pripojenie vinutí generátora k záťaži sa používajú polovodičové zariadenia - tyristory (triaky). Lineárny generátor je rozšírený konvenčný generátor, obr. 11. Napríklad s frekvenciou zodpovedajúcou 3000 cyklom / min a zdvihom ojnice 6 cm sa každé vinutie zahreje na 0,00083 sekundy, pričom prúd je 12-krát vyšší ako menovitý prúd, zvyšok času - takmer 0,01 sekundy, toto vinutie sa ochladí. Keď sa prevádzková frekvencia zníži, čas ohrevu sa zvýši, ale prúd, ktorý preteká vinutím a záťažou, sa zníži. Triak je spínač (môže uzavrieť alebo otvoriť elektrický obvod). Zatváranie a otváranie prebieha automaticky. Počas prevádzky, akonáhle magnetický tok začne križovať závity vinutia, na koncoch vinutia sa objaví indukované elektrické napätie, ktoré vedie k uzavretiu elektrického obvodu (otvorenie triaku). Potom, keď magnetický tok prekročí závity ďalšieho vinutia, pokles napätia na triakových elektródach vedie k otvoreniu elektrického obvodu. V každom okamihu je teda záťaž neustále zapnutá, v sérii, iba s jedným vinutím generátora.
Na obr. 12 znázorňuje montážny výkres generátora bez budiaceho vinutia.
Väčšina častí lineárnych motorov je tvorená rotačnou plochou, to znamená, že majú valcový tvar. To umožňuje ich výrobu pomocou najlacnejších a najviac automatizovaných sústružníckych operácií.
|
|
| Ryža. 12. Montážny výkres generátora. |
Matematický model lineárneho motora
Matematický model lineárneho generátora je založený na zákone zachovania energie a Newtonových zákonoch: v každom časovom okamihu, v čase t0 a t1, musia byť sily pôsobiace na piest rovnaké. Po krátkom čase sa piest pod pôsobením výslednej sily posunie o určitú vzdialenosť. V tomto krátkom úseku predpokladáme, že sa piest pohyboval rovnomerne. Hodnota všetkých síl sa bude meniť podľa fyzikálnych zákonov a počítajú sa pomocou známych vzorcov
[Príručka fyziky: Kuchling H. Per. s ním. 2. vyd. - M.: Mir, 1985. - 520 s., ill.]. Všetky údaje sa automaticky zapisujú do tabuľky, napríklad v Exceli. Potom sa t0 priradia hodnoty t1 a cyklus sa opakuje. To znamená, že vykonáme operáciu logaritmu.
Matematickým modelom je tabuľka napríklad v programe Excel a montážny výkres (náčrt) generátora. Náčrt neobsahuje lineárne rozmery, ale súradnice buniek tabuľky v Exceli. Zodpovedajúce odhadované lineárne rozmery sa zadajú do tabuľky a program vypočíta a vykreslí graf pohybu piestu vo virtuálnom generátore. To znamená, že dosadením rozmerov: priemer piestu, objem predvtokovej komory, zdvih piestu do preplachovacích okienok atď., dostaneme grafy prejdenej vzdialenosti, rýchlosti a zrýchlenia pohybu piestu v závislosti od času. To umožňuje virtuálne vypočítať stovky možností a vybrať si tú najlepšiu.
Tvar drôtov vinutia generátora
Vrstva drôtov jedného okna lineárneho generátora leží na rozdiel od bežného generátora v jednej rovine špirálovito stočenej, preto je jednoduchšie navinúť vinutie drôtmi nie kruhového prierezu, ale pravouhlého, ktoré je, vinutie je medená doska stočená do špirály. To umožňuje zvýšiť faktor plnenia okna, ako aj výrazne zvýšiť mechanickú pevnosť vinutia. Treba mať na pamäti, že rýchlosť ojnice, a teda aj pohyblivej časti magnetického obvodu, nie je rovnaká. To znamená, že čiary magnetickej indukcie križujú vinutie rôznych okien s rôzne rýchlosti. Pre plné využitie navíjanie drôtov, počet závitov každého okna musí zodpovedať rýchlosti magnetického toku v blízkosti tohto okna (rýchlosti ojnice). Počet otáčok vinutia každého okna sa volí s prihliadnutím na závislosť rýchlosti ojnice od vzdialenosti prejdenej ojnicou.
Taktiež pre rovnomernejšie napätie generovaného prúdu je možné navíjať vinutie každého okna medenou doskou rôznych hrúbok. V oblasti, kde rýchlosť ojnice nie je vysoká, sa navíjanie vykonáva doskou menšej hrúbky. Do okna sa zmestí väčší počet závitov vinutia a s nižšia rýchlosť ojnice v tejto sekcii bude generátor produkovať napätie zodpovedajúce napätiu prúdu vo viac "vysokorýchlostných" sekciách, hoci generovaný prúd bude oveľa nižší.
Aplikácia lineárneho elektrického generátora
Hlavnou aplikáciou opísaného generátora je zdroj neprerušiteľný zdroj napájania v podnikoch s malou kapacitou, ktoré umožňujú pripojené zariadenia dlho pracovať pri výpadku sieťového napätia alebo pri prekročení jeho parametrov prípustné normy. Elektrické generátory možno použiť na poskytovanie elektrickej energie do priemyselných a domácich elektrických zariadení, v miestach, kde nie je č elektrické siete, ako aj pohonná jednotka pre vozidlo ( hybridné auto), ako mobilný generátor elektrickej energie. Napríklad generátor elektrickej energie vo forme diplomata (kufor, taška). Používateľ si vezme so sebou na miesta, kde nie sú elektrické siete (stavba, turistika, vidiecky dom atď.) V prípade potreby stlačením tlačidla "štart" generátor spustí a dodáva elektrickú energiu do pripojených elektrických spotrebičov: spotrebičov. Ide o bežný zdroj elektrickej energie, len oveľa lacnejší a ľahší ako analógy.
Použitie lineárnych motorov umožňuje vytvoriť lacné, ľahko ovládateľné a spravovateľné, ľahké auto.
Vozidlo s lineárnym elektrickým generátorom
Vozidlo s lineárnym elektrickým generátorom je dvojmiestny ľahký (250 kg) automobil, obr. 13.
Pri jazde nie je potrebné prepínať rýchlosti (dva pedály). Vďaka tomu, že generátor dokáže vyvinúť maximálny výkon aj pri „rozjazde“ z pokoja (na rozdiel od bežného auta), charakteristika zrýchlenia aj pri nízkych výkonoch trakčný motor, mať najlepší výkon než u konvenčných áut. Efekt posilnenia riadenia a ABS systémy je dosiahnuté programovo, keďže všetok potrebný „hardvér“ už tam je (pohon každého kolesa umožňuje regulovať krútiaci moment resp. brzdný moment kolesá, napríklad pri otáčaní volantom sa krútiaci moment prerozdeľuje medzi pravé a ľavé ovládacie koleso a kolesá sa otáčajú samé, vodič ich nechá len otáčať, čiže ovládanie je bez námahy). Usporiadanie bloku vám umožňuje usporiadať auto na žiadosť spotrebiteľa (generátor môžete ľahko vymeniť za výkonnejší za pár minút).
to bežné auto len oveľa lacnejšie a ľahšie ako analógy.
Vlastnosti - jednoduchá obsluha, nízke náklady, rýchle nastavenie otáčok, výkon až 12 kW, pohon všetkých kolies (terénne vozidlo).
Vozidlo s navrhovaným generátorom má vzhľadom na špecifický tvar generátora veľmi nízko položené ťažisko, takže bude mať vysokú jazdnú stabilitu. Takéto vozidlo bude mať tiež veľmi vysoké akceleračné charakteristiky. Navrhované vozidlo je možné použiť maximálny výkon pohonná jednotka v celom rozsahu otáčok. Rozložená hmota pohonnej jednotky nezaťažuje karosériu auta, takže môže byť lacná, ľahká a jednoduchá.
Trakčný motor vozidla, v ktorom sa používa ako pohonná jednotka, musí spĺňať tieto podmienky:
Výkonové vinutia motora musia byť pripojené priamo, bez meniča, na svorky generátora (pre zvýšenie účinnosti elektrického prenosu a zníženie ceny prúdového meniča);
Rýchlosť otáčania výstupného hriadeľa elektromotora by mala byť regulovaná v širokom rozsahu a nemala by závisieť od frekvencie elektrického generátora;
Motor musí mať vysoký čas medzi poruchami, to znamená byť spoľahlivý v prevádzke (nemá zberač);
Motor musí byť lacný (jednoduchý);
Motor musí mať vysoký krútiaci moment pri nízkych výstupných otáčkach;
Motor by mal mať malú hmotnosť.
Obvod na zapnutie vinutia takéhoto motora je znázornený na obr. 14. Zmenou polarity napájania vinutia rotora získame krútiaci moment rotora.
Tiež zmenou veľkosti a polarity napájacieho zdroja vinutia rotora sa zavedie posuvné otáčanie rotora vzhľadom na magnetické pole statora. Riadením napájacieho prúdu vinutia rotora je riadený sklz v rozsahu od 0 ... 100 %. Napájanie vinutia rotora je približne 5% výkonu motora, preto je potrebné robiť nie na celý prúd trakčných motorov, ale len na ich budiaci prúd. Výkon meniča prúdu, napríklad pre palubný elektrický generátor 12 kW, je len 600 W a tento výkon je rozdelený do štyroch kanálov (každý trakčný motor kolesa má svoj kanál), t. výkon každého kanála prevodníka je 150 W. Preto nízka účinnosť meniča nebude mať významný vplyv na účinnosť systému. Prevodník môže byť vyrobený s použitím lacných polovodičových prvkov s nízkym výkonom.
Prúd z výstupov elektrického generátora bez akýchkoľvek transformácií sa privádza do výkonových vinutí trakčných motorov. Prevádza sa iba budiaci prúd tak, aby bol vždy v protifáze s prúdom výkonových vinutí. Keďže budiaci prúd je len 5 ... 6% z celkového prúdu spotrebovaného trakčným motorom, menič je potrebný na výkon 5 ... 6% z celkového výkonu generátora, čo výrazne zníži cenu a hmotnosť prevodníka a zvýšiť účinnosť systému. V tomto prípade musí menič budiaceho prúdu trakčných motorov „poznať“ polohu hriadeľa motora, aby mohol kedykoľvek dodávať prúd do budiacich vinutí, aby sa vytvoril maximálny krútiaci moment. Snímač polohy výstupného hriadeľa trakčného motora je absolútny snímač polohy.
Použitie lineárneho elektrického generátora ako pohonnej jednotky vozidla vám umožňuje vytvoriť auto blokového usporiadania. V prípade potreby je možná výmena veľkých komponentov a zostáv v priebehu niekoľkých minút, obr. 15, a tiež použiť karosériu s najlepším prietokom, keďže auto s nízkym výkonom nemá výkonovú rezervu na prekonávanie odporu vzduchu kvôli nedokonalým aerodynamickým tvarom (kvôli vysokému koeficientu odporu vzduchu).
Vozidlo s lineárnym kompresorom
Vozidlo s lineárnym kompresorom je dvojmiestne ľahké (200 kg) auto, obr. 16. Je to jednoduchšie a lacný analóg automobil s lineárnym generátorom, ale s nižšou účinnosťou prenosu.
Ako snímač rýchlosti kolesa sa používa inkrementálny snímač. Inkrementálne snímače majú impulzný výstup, pri otočení o určitý uhol sa na výstupe generuje napäťový impulz. Elektronický obvod snímača "počíta" počet impulzov za jednotku času a zapíše tento kód do výstupného registra. Keď riadiaci systém „odošle“ kód (adresu) tohto snímača, elektronický obvod kódovač, v sériovej forme dáva kód z výstupného registra informačnému vodiču. Riadiaci systém načíta kód snímača (informáciu o rýchlosti kolesa) a podľa daného algoritmu vygeneruje kód na ovládanie krokového motora aktuátora.
Záver
Náklady na vozidlo sú pre väčšinu ľudí 20-50 mesačných zárobkov. Ľudia si nemôžu dovoliť nakupovať nové auto za 8...12 tisíc dolárov a na trhu nie je auto v cenovej relácii 1...2 tisíc dolárov. Použitie lineárneho elektrického generátora alebo kompresora ako pohonnej jednotky automobilu umožňuje vytvoriť ľahko ovládateľné a lacné vozidlo.
Moderné technológie výroby dosiek plošných spojov a celý rad vyrábaných elektronických produktov umožňujú realizovať takmer všetky elektrické spojenia pomocou dvoch vodičov – silového a informačného. To znamená, že neinštalujte pripojenie každého jednotlivca elektrický spotrebič: senzory, akčné členy a signalizačné zariadenia a pripojiť každé zariadenie k spoločnému napájaciemu a spoločnému informačnému vodiču. Riadiaci systém zase zobrazuje kódy (adresy) zariadení v sériovom kóde na dátovom vodiči, po ktorom očakáva informáciu o stave zariadenia aj v sériovom kóde a na rovnakom riadku. . Na základe týchto signálov riadiaci systém generuje riadiace kódy pre ovládacie a signalizačné zariadenia a prenáša ich na prepnutie ovládacích alebo signalizačných zariadení do nového stavu (v prípade potreby). Počas inštalácie alebo opravy teda musí byť každé zariadenie pripojené k dvom vodičom (tieto dva vodiče sú spoločné pre všetky palubné elektrické spotrebiče) a elektrickej hmote.
Aby sa znížili náklady a tým aj cena výrobkov pre spotrebiteľa, je potrebné zjednodušiť inštaláciu a elektrické pripojenie palubných zariadení. Napríklad pri tradičnej inštalácii na zapnutie zadnej časti bočné svetlo, je potrebné pomocou vypínača uzavrieť elektrický napájací obvod osvetľovacie zariadenie. Obvod tvorí: zdroj elektrickej energie, spojovací vodič, pomerne výkonný spínač, elektrická záťaž. Každý prvok obvodu, okrem zdroja energie, vyžaduje individuálnu inštaláciu, lacný mechanický spínač má nízky počet cyklov „zapnuté-vypnuté“. Pri veľkom počte palubných elektrospotrebičov sa úmerne s počtom zariadení zvyšujú náklady na inštaláciu a pripojenie vodičov a zvyšuje sa pravdepodobnosť chyby v dôsledku ľudského faktora. Pre veľkoobjemovú výrobu jednoduchšie riadenie zariadení a čítanie informácií zo senzorov by sa malo vykonávať v jednom riadku, a nie jednotlivo, pre každé zariadenie. Napríklad, aby ste zapli zadné svetlo, v tomto prípade sa musíte dotknúť dotykového senzora, riadiaci obvod vygeneruje riadiaci kód na zapnutie koncového svetla. Adresa spínacieho zariadenia zadného obrysového svetla a signál na zapnutie budú vyvedené na dátový vodič, po ktorom sa uzavrie vnútorný napájací obvod zadného obrysového svetla. To znamená, že elektrické obvody sa tvoria komplexným spôsobom: automaticky pri výrobe dosiek plošných spojov (napríklad pri montáži dosiek na linky SMD) a elektrické pripojenie všetky zariadenia s dvoma spoločnými vodičmi a elektrickou "hmotnosťou".
Bibliografia
- Príručka fyziky: Kuchling H. Trans. s ním. 2. vyd. - M.: Mir, 1985. - 520 s., ill.
- plynová turbína železničná doprava. Bartosh E. T. Transport Publishing House, 1972, s. 1-144.
- Drafting - Haskin A. M. 4. vydanie, Perrerab. A navyše. --.: Vishcha shk. Vydavateľstvo Head, 1985. - 447 s.
- Triaky a ich aplikácia v domácich elektrických zariadeniach, Yu.A. Evseev, S.S. Krylov. 1990.
- Inzertný a informačný mesačník "Elektrotechnický trh" č.5 (23) september-október 2008.
- Dizajn motorov autotraktorov. R. A. Zeinetdinov, Dyakov I. F., S. V. Yarygin. Návod. Uljanovsk: UlGTU, 2004.- 168 s.
- Základy technológie prevodníka: tutoriál pre vysoké školy / O. Z. Popkov. 2. vydanie, stereo. - M.: Vydavateľstvo MPEI, 2007. 200 s.: ill.
- Základy priemyselnej elektroniky: Učebnica pre neelektrotechniku. špecialista. univerzity /V.G. Gerasimov, O M. Knyazkov, A E. Krasnopolskij, V.V. Suchorukov; vyd. V.G. Gerasimov. - 3. vydanie, prepracované. a dodatočné - M.: Vyššie. škola, 2006. - 336 s., ill.
- . Teória a výpočet pracovných procesov. 4. vydanie, revidované a doplnené. Pod generálnou redakciou A.S. Orlin a M.G. Kruglov. M.: Mashinostroenie. 1984.
- Elektrotechnika a elektronika v 3 knihách. Ed. V.G. Gerasimov kniha 2. Elektromagnetické prístroje a elektrické stroje. - M.: Vysoká škola. - 2007
Ďakujeme vám za váš príspevok k rozvoju domácej vedy a techniky!
Prevažná väčšina elektromotorov sú elektromotory s rotačným pohybom. Zároveň mnohé pracovné orgány výrobných strojov musia podľa technológie svojej práce vykonávať translačný (napríklad dopravníky, dopravníky a pod.) alebo vratný pohyb (posuvové mechanizmy obrábacích strojov, manipulátory, piest a iné stroje).
Transformácia rotačného pohybu na translačný sa uskutočňuje pomocou špeciálnych kinematických väzieb: skrutka-matica, guľôčkový skrutkový prevod, pastorkový ozubený hrebeň, kľukový prevod a iné.
Pre konštruktérov pracovných strojov je prirodzené, že na pohon pracovných telies, ktoré vykonávajú translačný a vratný pohyb, používajú motory, ktorých rotor sa pohybuje lineárne.
V súčasnosti sa vyvíjajú elektrické pohony pomocou lineárnych asynchrónnych, ventilových a. V zásade môže byť lineárny motor akéhokoľvek typu vytvorený z motora s rotačným pohybom lineárnym zametaním valcového statora do roviny.
Predstavu o štruktúre lineárneho asynchrónneho motora možno získať otočením statora asynchrónneho motora do roviny. V tomto prípade sa vektor magnetizačných síl statora bude pohybovať lineárne pozdĺž vychýlenia statora, t.j. v tomto prípade neotáčavý (ako napr konvenčné motory), ale pohybujúce sa elektromagnetické pole statora.
Ako sekundárny prvok možno použiť feromagnetický pás umiestnený s malou vzduchovou medzerou pozdĺž statora. Tento pás hrá úlohu rotora vo veveričke. Sekundárny prvok je unášaný pohybujúcim sa statorovým poľom a pohybuje sa lineárne rýchlosťou menšou ako je rýchlosť statorového poľa o veľkosť lineárneho absolútneho sklzu.
Lineárna rýchlosť postupujúceho elektromagnetického poľa bude
![]()
kde τ, m - pólové delenie - vzdialenosť medzi susednými pólmi lineárneho indukčného motora.
Rýchlosť sekundárneho prvku
![]()
kde sL je relatívny lineárny sklz.
Keď je motor napájaný napätím štandardnej frekvencie, výsledné rýchlosti poľa budú dosť veľké (viac ako 3 m/s), čo sťažuje použitie týchto motorov na pohon priemyselných mechanizmov. Tieto motory sa používajú na vysokú rýchlosť transportné mechanizmy. Pre viac nízke rýchlosti riadenie pohybu a otáčok lineárneho asynchrónneho motora, jeho vinutia sú napájané z frekvenčného meniča.
Ryža. 1. Návrh lineárneho jednosúradnicového motora.
Používa sa niekoľko konštrukčných možností pre lineárny indukčný motor. Jeden z nich je znázornený na obr. 1. Sekundárny prvok (2) - pás pripojený k pracovnému telesu, sa pohybuje pozdĺž vodidiel 1 pôsobením postupujúceho elektromagnetického poľa vytváraného statorom 3. Táto konštrukcia je vhodná na montáž s pracovným strojom, avšak , je to spojené s výraznými rozptylovými tokmi statorového poľa, v dôsledku čoho bude cosφ motora nízka.

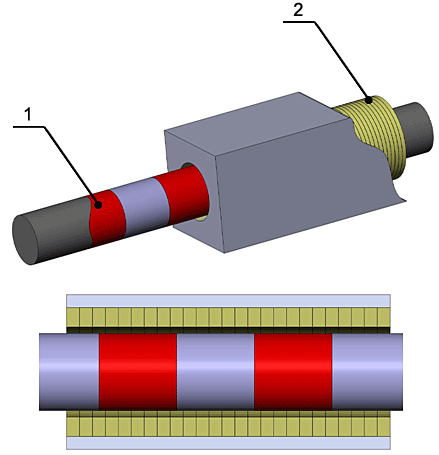
Obr.2. Lineárny motor cylindrický dizajn
Na zvýšenie elektromagnetickej väzby medzi statorom a sekundárnym prvkom je tento umiestnený v štrbine medzi oboma statormi alebo je konštrukcia motora vytvorená vo forme valca (pozri obr. 2). V tomto prípade je stator motora rúrka (1), vo vnútri ktorej sú valcové naskladané cievky (2), ktoré sú vinutím statora. Medzi cievkami sú feromagnetické podložky 3, ktoré sú súčasťou magnetického obvodu. Sekundárny prvok - rúrková tyč je tiež vyrobený z feromagnetického materiálu.
Lineárne indukčné motory môžu byť aj inverznej konštrukcie, kde sekundár stojí a stator sa pohybuje. Takéto motory sa bežne používajú vo vozidlách. V tomto prípade sa ako sekundárny prvok používa koľajnica alebo špeciálna lišta a stator je umiestnený na pohyblivom vozíku.
Nedostatok lineárneho a synchrónne motory je nízka účinnosť a s tým spojené energetické straty, predovšetkým v sekundárnom prvku (sklzové straty).
Nedávno sa začali uplatňovať okrem asynchrónnych. Konštrukcia lineárneho motora tohto typu je podobná konštrukcii znázornenej na obr. 1. Stator motora je otočený do roviny a na sekundárnom prvku sú umiestnené permanentné magnety. Je možný variant obrátenej konštrukcie, keď stator je pohyblivá časť a sekundárny prvok s permanentnými magnetmi je stacionárny. Vinutia statora sa spínajú v závislosti od vzájomnej polohy magnetov. Na tento účel je v konštrukcii poskytnutý snímač polohy (4 - na obr. 1).
Pre polohové pohony sa efektívne využívajú aj lineárne pohony. krokové motory. Ak je stator krokového motora otočený do roviny a sekundárny prvok je vyrobený vo forme dosky, na ktorej sú zuby vytvorené frézovaním drážok, potom pri príslušnom spínaní statorových vinutí sekundárny prvok vykoná diskrétny pohyb. , ktorého krok môže byť veľmi malý - až zlomky milimetra. Často sa používa obrátený dizajn, v ktorom je sekundárny prvok stacionárny.
Rýchlosť lineárneho krokového motora je určená hodnotou zubového delenia τ, počtom fáz m a frekvenciou spínania.
Potvrdenie vysoké rýchlosti pohyb nespôsobuje ťažkosti, pretože zvýšenie delenia zubov a frekvencie nie je obmedzené technologickými faktormi. Pre minimálnu hodnotu τ existujú obmedzenia, od r pomer delenia zubov k medzere medzi statorom a sekundárnym prvkom musí byť najmenej 10.

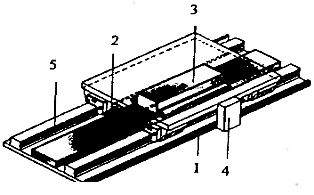
Použitie diskrétneho pohonu umožňuje nielen zjednodušiť konštrukciu mechanizmov, ktoré vykonávajú lineárny pohyb s jednou súradnicou, ale tiež umožňuje získať dvoj alebo viac súradnicový pohyb pomocou jedného pohonu. Ak sú na statore pohyblivej časti ortogonálne usporiadané dva systémy vinutí a v sekundárnom prvku sú vytvorené drážky v dvoch kolmých smeroch, potom bude pohyblivý prvok vykonávať diskrétny pohyb v dvoch súradniciach, t.j. zabezpečiť pohyb po rovine.
V tomto prípade vzniká problém s vytvorením podpery pre pohyblivý prvok. Na jeho vyriešenie možno použiť vzduchový vankúš - tlak vzduchu privádzaného v priestore pod pohyblivými prvkami. Lineárne krokové motory vyvíjajú relatívne nízke ťažná sila a majú nízku účinnosť. Ich hlavnými aplikáciami sú ľahké manipulátory, ľahké montážne stroje, meracie stroje, laserové rezacie stroje a ďalšie zariadenia.
Katolitskij Nikita Alexandrovič
študent elektroenergetickej fakulty Stavropolskej štátnej agrárnej univerzity Stavropol, Rusko
Abstrakt: Článok popisuje zariadenie, typy lineárnych motorov, ich rozdiely od iných typov elektromotorov, podrobne popisuje použitie, výhody a nevýhody. Účelom článku je popísať výhody lineárnych motorov oproti ostatným.
Kľúčové slová: Lineárny elektromotor, rotor, stator, pohon, kotva, magnetický obvod
Lineárny elektromotor
Katolickij Nikita Alexandrovič
študent Katedra elektriny Stavropol State Agrarian University Stavropol, Rusko
Abstrakt: V článku je popísané zariadenie, typy lineárnych motorov, ich odlišnosti od iných typov elektromotorov, aplikácia, prednosti a nedostatky. Účelom článku je opísať výhody lineárnych motorov oproti iným.
Kľúčové slová: lineárny elektromotor, rotor, stator, pohon, kotva, magnetický vodič
V priebehu rokov priemysel závisel na rôznych remeňových a skrutkových pohonoch, ako aj na pneumatických mechanizmoch pri vykonávaní lineárneho polohovania. Dopyt po vysokorýchlostnej šírke pásma, viacnásobné pracovné cykly a flexibilná konfigurácia a programovanie identifikovali slabé stránky týchto zariadení. Pri vykonávaní presného riadeného polohovania v translačných pohyboch je často potrebné urobiť kompromisy.
Technológia priameho pohonu lineárneho motora dosahuje vysoká kvalita riešenie problémov lineárneho polohovania. Táto technológia zahŕňa priame využitie sily elektromagnetickej interakcie bez použitia remeňa, guľôčkovej skrutky alebo iného medzičlánku. Lineárny pohon zabezpečuje priamy lineárny pohyb(nedochádza k premene rotačného pohybu na translačný).
Obrázok 1 - Zariadenie lineárneho motora
Elektrický lineárny motor je mechanizmus, v ktorom sa pohyblivá časť neotáča (v tradičných verziách motorov sa pohyblivá časť otáča), ale pohybuje sa lineárne pozdĺž pevnej časti jednotky, ktorá je prezentovaná vo forme otvoreného magnetického obvodu, ktorého dĺžka má ľubovoľnú hodnotu. Vo vnútri magnetického obvodu sa vytvára putujúce magnetické pole. V štandardných elektromotoroch sú rotátor a stator zvinuté vo forme krúžkov, zatiaľ čo v lineárnom motore sú tieto prvky natiahnuté do pásov. V dôsledku toho, že vinutie statora je striedavo zapnuté, vytvára sa pohyblivé magnetické pole. Zloženie lineárneho elektromotora priamy prúd vstupuje kotva s vinutím umiestneným na jej povrchu, ktoré je kolektorom (vodiaci prvok) a otvoreným magnetickým obvodom s budiacimi vinutiami (pohyblivá časť) usporiadanými tak, že vektory síl vyskytujúce sa v póloch magnetického obvodu majú jeden smer. Jednoduché nastavenie rýchlosti pohybu pohyblivej časti - rozlišovacia črta lineárny motor. Agregáty striedavý prúd môžu byť synchrónne alebo asynchrónne. Kotva v asynchrónnom lineárnom elektromotore je vyrobená vo forme tyče, najčastejšie obdĺžnikového prierezu, na ktorej nie je vinutie. Kotva je namontovaná pozdĺž dráhy pohybu pohyblivej časti jednotky, vybavená magnetickým obvodom s rozmiestnenými viacfázovými vinutiami, ktoré sú napájané zo zdroja striedavého prúdu. V dôsledku interakcie magnetického poľa magnetického obvodu pohyblivej časti a poľa kotvy vznikajú sily, vďaka ktorým sa pohyblivá časť pohybuje rýchlejšie v porovnaní s pevnou kotvou. Proces prebieha až do rovnice rýchlosti pohybu pohyblivej časti a postupujúceho magnetického poľa.
Najčastejšie sa takéto jednotky používajú v oblasti elektrickej dopravy. Toto je uľahčené špeciálnymi výhodami motorov tohto typu:
Priamočiary pohyb statora je skvelý pre mnoho vozidiel;
Jednoduchý dizajn, v ktorom nie sú žiadne trecie prvky, to znamená, že tok energie vo vnútri magnetického poľa sa priamo premieňa na mechanickú energiu. Vďaka tomu sa dosiahne vysoká účinnosť a spoľahlivosť jednotky;
Nezávislosť ťažnej sily od adhézie dvojkolesia so železničnými traťami. Táto vlastnosť je pre štandardné agregáty nedosiahnuteľná elektrická trakcia;
Absencia možnosti ťahania kolies elektromobilov, čo bolo dôvodom voľby lineárneho motora;
Zrýchlenie a rýchlosť prepravy môžu mať ľubovoľné hodnoty, obmedzené komfortom pohybu, povolená rýchlosť odvaľovanie kolies na koľajniciach a cestách, ako aj stupeň dynamickej stability podvozku vozidla a trate.
Na pohon mechanizmov na prepravu rôznych produktov sú potrebné lineárne motory asynchrónneho typu. Tieto dopravníky sú vybavené kovovými pásmi, ktoré bežia vo vnútri statorov systémov lineárnych motorov a pôsobia ako sekundárny prvok. Použitie systému lineárneho motora znižuje predpätie pásu, eliminuje preklzávanie pásu a zlepšuje rýchlosť a spoľahlivosť dopravníka.
Lineárne motory sa používajú pre rázové stroje, ako sú baradlá, ktoré sú potrebné v oblasti cestných prác a stavebníctva. Stator systému lineárneho motora je umiestnený na výložníku kladiva a jeho pohyb po vodiacich prvkoch výložníka vo vertikálnom smere zabezpečuje navijak. Nárazová časť kladiva plní funkciu sekundárneho prvku pohonného systému. Na zdvihnutie nárazovej časti kladiva sa motor zapne tak, aby bežecké pole smerovalo nahor. Keď nárazový prvok dosiahne krajnú hornú polohu, motor sa deaktivuje a nárazový prvok sa pod vplyvom gravitácie posunie dole na povrch hromady. Niekedy k deaktivácii motora nedôjde - pohonný systém pracuje v opačnom režime, čím sa zvyšuje sila nárazu. Podľa stupňa prehĺbenia hromady sa stator pohonného ústrojenstva pohybuje nadol vďaka navijaku. Konštrukcia elektrického kladiva je pomerne jednoduchá. Je celkom jednoduché ho vyrobiť. Nie je potrebná zvýšená presnosť pri výrobe jeho prvkov a jeho konštrukcia nie je citlivá na zmeny teplotných indikátorov, takže zariadenie môže okamžite začať vykonávať svoje funkcie.
Magnetohydrodynamické čerpadlá sú považované za jeden z typov lineárnych pohonných systémov. Tieto zariadenia sa používajú na čerpanie elektricky vodivých kvapalín. Takéto čerpadlá sú široko používané: v metalurgii na prepravu, dávkovanie a premiestňovanie kovov v tekutej forme av jadrových elektrárňach na čerpanie chladív tekutých kovov.
Magnetohydrodynamické čerpadlá sú dvoch typov: jednosmerný a striedavý prúd. V prvom prípade pôsobí ako primárny prvok (stator) elektromagnet v tvare C. Vo vzduchovej medzere elektromagnetu je namontované potrubie s tekutým kovom. Vďaka elektródam privareným k stenám potrubia prechádza jednosmerný prúd z externého zdroja. Vo väčšine prípadov je budiace vinutie zahrnuté v sériovom obvode elektród. Pri vybudení elektrického magnetu pôsobí na kov nachádzajúci sa v oblastiach, ktorými prechádza jednosmerný prúd, elektromagnetická sila, rovnaká ako sila pôsobiaca na vodič s prúdom umiestnený v zóne magnetického poľa. V dôsledku tejto sily sa kov pohybuje potrubím. Kľúčové rozdiely medzi čerpadlami MHD sú absencia pohyblivých mechanických prvkov, ako aj možnosť utesnenia kovového transportného kanála.
Medzi výhody lineárnych pohonných systémov patrí absencia rotačných prvkov. Medzi nevýhody patrí nízka energetická náročnosť v porovnaní so štandardnými modelmi elektrické pohony, čo sa vysvetľuje otvoreným elektromagnetickým obvodom a značnými pracovnými vôľami. Okrem toho sú nevýhodami zložitosť a vysoké náklady na výrobu. Lineárne pohonné systémy použitie pre vlaky, vysoká rýchlosť pozemná doprava patriace do skupiny levitujúcich vozidiel. Celková účinnosť štandardného agregátu a lineárneho elektromotora sú v prípade jeho optimalizácie takmer rovnaké v prípadoch, keď sú vylúčené medzičlánky prenosu ťažnej sily. Postupom času lineárne motory nahradia tradičné prevodové pohony.
Bibliografia:
- Grinchenko V. A. Zdôvodnenie základnej konštrukcie lineárneho elektromotora // Theoretical & Applied Science. - 2013. - zväzok 1. - č. 11 (7). - S. 58-60.
- Grinchenko V. A., Mišukov S. V. Výpočet statickej prítlačnej sily lineárneho elektromotora nový dizajn// Nové úlohy technických vied a spôsoby ich riešenia. - Ufa: Aeterna, 2014. - S. 18-20.
- Nikitenko G. V., Grinchenko V. A. Lineárny motor s vratným pohybom s riadením amplitúdy kmitania kotvy // Metódy a technické prostriedky zlepšenie efektívnosti využívania elektrických zariadení v priemysle a poľnohospodárstve. - Stavropol: Agrus, 2009. - S. 407-410.
- Nikitenko G. V., Grinchenko V. A. Výsledky štúdie lineárneho motora pre vákuový pulzátor dojacieho stroja // Metódy a technické prostriedky na zlepšenie účinnosti používania elektrických zariadení v priemysle a poľnohospodárstve. - Stavropol: Agrus, 2010. - S. 268-272.
- Pat. 2357143 Ruská federácia, MPK8 F 16 K 31/06. Solenoidový ventil/ Nikitenko G. V., Grinchenko V. A.; prihlasovateľ a držiteľ patentu Stavrop. štát agrárny un-t. - č. 2007141983/06; dec. 12.11.07; publ. 27.05.2009.
- Pat. 2370874 Ruská federácia, MPK8 H 02 K 33/12. Lineárny motor / Nikitenko G. V., Grinchenko V. A.; prihlasovateľ a držiteľ patentu Stavrop. štát agrárny un-t. - č. 2008112342/09; dec. 31. 3. 2008; publ. 20.10.09.
- Pat. 82990 Ruská federácia, MPK8 A 01 J 7/00. Vákuový regulátor / Nikitenko G. V., Grinchenko V. A.; prihlasovateľ a držiteľ patentu Stavrop. štát agrárny un-t. - číslo 2008150545/22; dec. 19.12.08; publ. 20.05.2009.
Hlavné zmeny, ktoré nastali v hnacej časti obrábacích strojov za posledné storočie, sú spojené s postupným približovaním motora k pracovnému telesu. Na tejto ceste boli masívne podávacie skrine s veľkým počtom medzičlánkov kinematického reťazca, dvoj alebo trojstupňové prevodovky, remeňové pohony, priame pohony cez spojku. Prechod do ďalšej etapy bol vždy spojený s využívaním najnovších vedeckých poznatkov, ktoré sa tak či onak uplatnili v konštrukcii obrábacích strojov, s nástupom nových technológií alebo so znižovaním nákladov existujúcich. Pohony na báze variabilných elektromotorov a s guľôčkovými skrutkami (guličkové skrutky) boli spočiatku extrémne drahé, a tak sa ich použitie oplatilo len pár výrobcom. V dnešnej dobe si už len ťažko vieme predstaviť moderný stroj, ktorý by sa zaobišiel bez guľôčkovej skrutky alebo v ktorom sa posuv reguluje stupňovito, posúvaním blokov ozubených kolies.
Charakteristické je, že v každej fáze sa nikdy okamžite neobjavil dizajn, ktorý bol optimálny vo všetkých ohľadoch. Zlepšenie vždy prebiehalo pokusom a omylom, dôsledným zdokonaľovaním a odstraňovaním nedostatkov. V konečnom dôsledku sa rozšírili konfigurácie uzlov, ktoré prešli testom času, dlhodobej prevádzky a preukázali svoju ekonomickú efektívnosť.

Ryža. 1. Guličková skrutka
Takouto osvedčenou, dlhodobo overenou konštrukciou je v súčasnosti pohon pomocou guľôčkovej skrutky spojenej s motorom priamo pomocou spojky, menej často remeňa resp. ozubené koleso. Výroba všetkých prvkov pohonu je už dlho vypracovaná, technológie sú optimalizované, a preto sú náklady dosť konkurencieschopné.
Napriek tomu túžba dizajnérov minimalizovať kinematický reťazec nezmizla. Posledným krokom k prekročeniu bola guľôčková skrutka. A lineárne motory to umožnili.
Logickým výsledkom, ku ktorému viedol ich vývoj v posledných desaťročiach, je použitie lineárnych motorov v pohonoch posuvu moderných obrábacích strojov. Použitie lineárnych pohonov je však v súčasnosti len v počiatočnom štádiu. Technológia ich výroby stále nie je plne automatizovaná, cena je vysoká a aplikácia zďaleka nie je vždy vhodná. Lineárny motor nedostal svoje "referenčné" uskutočnenie (alebo množstvo takýchto uskutočnení, testovaných časom, ktorých výber sa uskutočňuje v závislosti od špecifík použitia) a existujú rôzne konštrukcie, ktoré napriek množstvu bezpodmienečných spoločných výhod , sa navzájom výrazne líšia, majú rôzne silné stránky a slabé stránky. Toto je fáza, ktorou prechádza každá inovácia. A stále viac výrobcov sa zameriava na lineárne motory pre pohony posuvov, a to ako pre špecifické zariadenia, ako sú EDM stroje, tak aj pre frézky a sústruhy.
Použitie lineárnych motorov je opodstatnené pre presné zariadenia a kedy dynamická odozva pohon: maximálne povolené zrýchlenia, hodnoty maximálnych a minimálnych povolených rýchlostí. Avšak aj pre zariadenia tejto triedy lineárne pohony sa inštalujú, často len na marketingové účely, pretože ultra presné zariadenia by mali byť štandardne „prepchané“ inováciami, ktoré umožňujú dosiahnuť najvyššiu presnosť, ktorá je pre konkurentov nedostupná. Zároveň sa na ne zabúda ako ekonomická efektívnosť používanie takýchto pohonov, čo vedie k neodôvodnenému zvyšovaniu nákladov na spracovanie, a technologická nutnosť takéhoto riešenia ako celku.
Vo svetle vyššie uvedeného stojí za povšimnutie stratégia zvolená spoločnosťou. Mitsubishi Electric. Pred viac ako 40 rokmi spoločnosť predstavila svoj prvý EDM drôtový rezací stroj a už v roku 1978 - sériový vysokorýchlostný a vysoko presný 4-osový EDM drôtový rezací stroj.

Ryža. 2. Mitsubishi NA1200
Dnes zostáva know-how nahromadené počas mnohých desaťročí v kombinácii s intenzívnou výskumnou prácou rozhodujúcim kritériom pri vývoji nových EDM systémov. Ako jeden z popredných výrobcov EDM zariadení a zároveň jeden z najväčších výrobcov lineárne motory, japonská firma Donedávna som ich na svoje stroje neinštaloval. Až v roku 2009 boli prvýkrát použité lineárne motory (cylindrické) na strojoch radu NA (obr. 2). Vynára sa otázka, prečo obria korporácia odmieta používať vo svojich zariadeniach vlastné komponenty, napriek tomu, že tieto komponenty (lineárne motory) sa úspešne predávajú po celom svete?
Ak chcete získať odpoveď na túto otázku, stojí za to sa bližšie pozrieť na konkrétne návrhy.
K dnešnému dňu sú najbežnejšie v kovoobrábacích strojoch ploché lineárne motory. Schematický diagram takéhoto motora je znázornený na obr. 3.
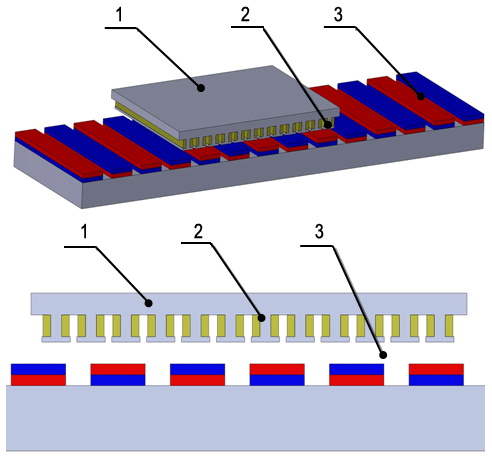
Ryža. 3. Plochý lineárny motor: schéma zapojenia
Motor sa skladá z dvoch hlavných častí: posúvača, čo je jadro 1 s vinutiami 2 a pevnej časti s permanentnými magnetmi 3.
Práve prítomnosť jadra je hlavným zdrojom charakteristiky tento typ nevýhody motora:
Zvážte teraz lineárny motor používaný spoločnosťou Mitsubishi Electric. V ultra-presnom stroji Mitsubishi NA 1200 sa ako pohony používajú osi X, Y, U, V valcové lineárne motory
Schematický diagram valcového lineárneho motora je znázornený na obr. 12. Zvláštnosť jeho konštrukcie spočíva v tom, že vinutia 2 sú umiestnené okolo valcového tvaru permanentné magnety 1, ale v zásade neexistuje žiadne jadro!
Ryža. 12. Cylindrický lineárny motor: schéma zapojenia
Valcový lineárny motor vďaka svojej konštrukcii nemá všetky nevýhody plochého lineárneho motora diskutovaného vyššie. Pozrime sa bližšie na každý z nich.
Vráťme sa k otázke, ktorá bola nastolená na začiatku: prečo sa lineárne motory objavili v strojoch Mitsubishi len relatívne nedávno? Teraz je odpoveď oveľa jednoduchšia.

Ryža. 18.Mitsubishi MV1200R
Je zrejmé, že špecialisti spoločnosti kvôli túžbe byť na vrchole vlny technického pokroku neuprednostňovali ploché lineárne motory, ktoré im nevyhovovali predovšetkým z hľadiska ekonomických ukazovateľov: vysoké vlastné náklady , vysoká cena prevádzky a opravy, ktoré sa nevyhnutne prenášajú do nákladov na diel získaný na stroji. Kým nebolo použitie klasických pohonov s guľôčkovou skrutkou ekonomicky opodstatnené a zároveň umožnilo dosiahnuť najvyššiu presnosť obrábania, inžinieri spoločnosti sledovali len to, ako budú fungovať lineárne motory vo vzťahu k EDM strojom. V dôsledku toho sa našlo riešenie. Na trhu sa objavil relatívne nový typ lineárnych motorov - valcový lineárny motor (CLM), ktorý má v porovnaní s analógmi množstvo výhod a je z ekonomického hľadiska veľmi efektívny: nízka spotreba energie, jednoduchá výroba a montáž . Všetky vyššie uvedené nedostatky plochých lineárnych motorov nie sú charakteristické pre valcovité.
V roku 2009 bola uvedená do výroby séria ultrapresných NA strojov s CLD. Tieto stroje sa ukázali ako vynikajúce a prinútili japonských špecialistov zamyslieť sa nad modernizáciou iných strojov vyrábaných spoločnosťou. V marci 2012 Mitsubishi Electric oznámilo spustenie výroby nová séria MV s CLD a predviedli tieto stroje na výstave INTERMOLD 2012 v Osake (Japonsko). Séria MV je navrhnutá tak, aby nahradila osvedčené série FA a BA. Zatiaľ čo nové stroje majú vynikajúce možnosti spracovania a vynikajúcu presnosť, ich hlavnou výhodou je ekonomická efektívnosť a extrémne nízke prevádzkové náklady. Z veľkej časti vďaka použitiu CLD spotrebujú stroje série MV o 69 % menej energie ako ich predchodcovia a umožňujú o 42 % nižšie náklady na obrábanie s 30 % skrátením času! Toto je skutočne úžasný výsledok, ktorý nám umožňuje tvrdiť, že CLD sa budú naďalej úspešne používať v obrábacích strojoch Mitsubishi Electric.
Použitie CLD si vyžiadalo vývoj a aplikáciu najviac pokročilá technológia ovládanie pomocou ultra-vysokorýchlostnej komunikácie z optických vlákien a systémovej komunikácie v reálnom čase. Určite nás čaká ďalšie zlepšenie konštrukčných a riadiacich systémov, ale už teraz môžeme s istotou povedať, že použitie CLD v elektroerozívnych strojoch je inovatívnym riešením, ktoré nová etapa vývoj v priemysle obrábacích strojov.
1. Úvod.
2. Lineárny asynchrónny motor.
2.1 Konštrukcia a princíp činnosti.
2.2 Odrody.
2.2.2 Oblúkový motor.
2.2.3 Rúrkový motor.
2.3 Aplikácia.
3. Lineárny jednosmerný motor.
3.1 Konštrukcia a princíp činnosti.
3.2 Aplikácia.
4. Lineárny synchrónny motor.
4.1 Aplikácia.
5. Záver.
1. Úvod.
Zaujímavé a široké perspektívy rozvoja elektrického pohonu sú spojené s použitím takzvaných lineárnych motorov.
Veľké množstvo výrobných mechanizmov a zariadení má translačný alebo vratný pohyb pracovných telies (zdvíhacie a transportné stroje, podávacie mechanizmy rôznych obrábacích strojov, lisy, buchary a pod.). Ako pohon týchto mechanizmov a zariadení boli použité konvenčné elektromotory v kombinácii so špeciálnymi typmi mechanických prevodov (kľukový mechanizmus, skrutkovo-maticový prevod), ktoré transformovali rotačný pohyb pracovného telesa.
Lineárne motory môžu byť asynchrónne, synchrónne a jednosmerné, opakujúce zodpovedajúce motory s rotačným pohybom podľa princípu ich činnosti.
2. Lineárny asynchrónny motor.
2.1 Konštrukcia a princíp činnosti.
Najrozšírenejšie sú asynchrónne lineárne motory. Predstavu o zariadení lineárneho indukčného motora možno získať, ak v duchu rozrežete (obr. 1) stator 1 a rotor 4 s vinutiami 2 a 3 bežného indukčného motora pozdĺž osi pozdĺž tvoriacej čiary a otočíte ho. do roviny, ako je znázornené na obrázku. Výsledný "plochý" dizajn je schému zapojenia lineárny motor. Ak sú teraz statorové vinutia 2 takéhoto motora pripojené k sieti striedavého prúdu, vytvorí sa magnetické pole, ktorého os sa bude pohybovať pozdĺž vzduchovej medzery rýchlosťou úmernou frekvencii napájacieho napätia a dĺžke pólová divízia. Toto magnetické pole pohybujúce sa pozdĺž medzery prechádza cez vodiče vinutia 3 rotora a indukuje v nich EMF, pod vplyvom ktorého prúdy začnú pretekať vinutím. Interakcia prúdov s magnetickým poľom povedie k vzhľad moci, pôsobiace podľa známeho Lenzovho pravidla v smere pohybu magnetického poľa. Rotor - v budúcnosti ho budeme nazývať sekundárny prvok - sa pod vplyvom tejto sily začne pohybovať s určitým oneskorením (sklzom) od magnetického poľa, ako v bežnom asynchrónnom motore.
2.2 Odrody.
2.2.1 Parametre návrhu.
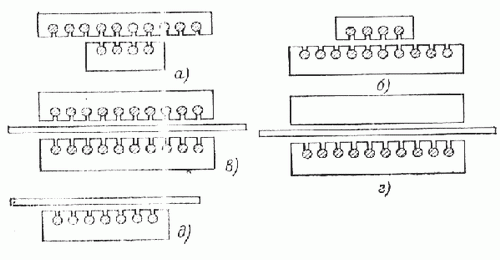
Na obr. 2 ide o lineárny motor s rovnakými rozmermi statora a sekundárneho prvku. Okrem tejto konštrukcie, v závislosti od účelu lineárneho motora, môže byť sekundárny prvok dlhší ako stator (obr. 2a) alebo kratší ako stator (obr. 2b). Takéto motory sa nazývajú motory s krátkym statorom a krátkym sekundárnym prvkom. Sekundárny prvok lineárneho motora nie je vždy vybavený vinutím. Často - a to je jedna z výhod lineárneho indukčného motora - sa ako sekundárny prvok používa kovový plech (pás), ako je znázornené na obr. 2d. V tomto prípade môže byť sekundárny prvok umiestnený aj medzi dvoma statormi (obr. 2c) alebo medzi statorom a feromagnetickým jadrom (obr. 2d). Motor so štruktúrnou schémou znázornenou na obr. 2d, sa nazýval motor s jednostranným statorom, so schémou podľa obr. 2c - s obojstranným statorom a so zapojením podľa obr. 2d - s jednostranným statorom a jadrom. Sekundárny prvok je vyrobený z medi, hliníka alebo ocele a použitie nemagnetického sekundárneho prvku zahŕňa použitie konštrukčných schém s uzatváraním magnetického toku cez feromagnetické prvky, ako napríklad na obr. 2c a 2d.. Do istej miery sa rozšírili zložité kompozitné sekundárne prvky s pásikmi z nemagnetického a feromagnetického materiálu priľahlými k sebe, pričom feromagnetický pásik pôsobí ako súčasť magnetického obvodu. Princíp činnosti lineárnych motorov so sekundárnym prvkom vo forme pásu opakuje činnosť bežného asynchrónneho motora s masívnym feromagnetickým alebo dutým nemagnetickým rotorom. Statorové vinutia lineárnych motorov majú rovnaké schémy zapojenia ako bežné asynchrónne motory a sú zvyčajne pripojené k trojfázovej sieti striedavého prúdu. Všimnite si, že lineárne motory veľmi často pracujú v takzvanom režime obráteného pohybu, keď sekundárny prvok stojí a stator sa pohybuje. Takýto lineárny motor, nazývaný motor s pohyblivým statorom, nachádza široké uplatnenie najmä v elektrických vozidlách.
2.2.2 Oblúkový motor.
Oblúkový motor je charakterizovaný umiestnením vinutia na časti kruhu, ako je znázornené na obr. 3. Charakteristickým znakom tohto motora je závislosť rýchlosti otáčania jeho statora 1 od dĺžky oblúka, na ktorom sú umiestnené vinutia 2 statora 3.
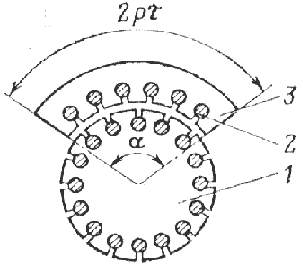
Nech sú vinutia statora umiestnené na oblúku, ktorého dĺžka zodpovedá stredovému uhlu α = 2τr, kde τ je dĺžka delenia pólov a p je počet párov pólov. Potom sa v jednej aktuálnej perióde rotujúce pole statora otočí o uhol 2τр/р = α/р a do jednej minúty sa pole otočí o n = α/p*60f/2π otáčky, t.j. frekvencia otáčania n, asi /min
Výberom rôznych α je možné vyrobiť oblúkové motory s rôznymi rýchlosťami rotora.
2.2.3 Rúrkový motor.
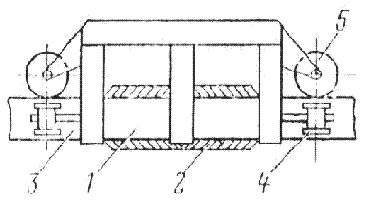
Konštrukcia rúrkového lineárneho motora je znázornená na obr. štyri.
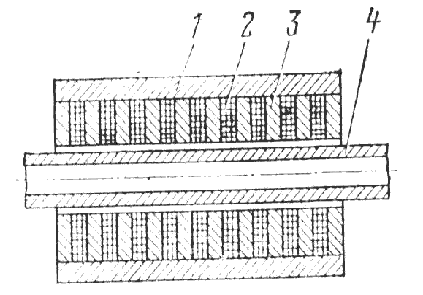
Stator motora 1 má tvar rúrky, vo vnútri ktorej sú striedavo ploché kotúčové cievky 2 (vinutia statora) a kovové podložky 3, ktoré sú súčasťou magnetického obvodu. cievky motora sú zapojené do skupín a tvoria vinutia jednotlivých fáz motora. Vo vnútri statora je umiestnený sekundárny prvok 4 tiež rúrkový, vyrobený z feromagnetického materiálu.
Pri zapojení statorových vinutí do siete sa pozdĺž jeho vnútorného povrchu vytvorí putujúce magnetické pole, ktoré indukuje prúdy v tele sekundárneho prvku smerujúce po jeho obvode. Interakciou týchto prúdov s magnetickým poľom motora vzniká sila pôsobiaca pozdĺž potrubia na sekundárny prvok, ktorá spôsobuje (pri fixovanom statore) pohyb sekundárneho prvku v tomto smere. Rúrková konštrukcia lineárnych motorov sa vyznačuje axiálnym smerom magnetického toku, na rozdiel od plochého lineárneho motora, v ktorom má magnetický tok radiálny smer.
2.3 Aplikácia.
Lineárne motory našli široké uplatnenie v elektrickej doprave, čo uľahčili celý riadok výhody týchto motorov. Jeden z nich, už spomenutý vyššie, je určený priamosťou pohybu sekundárneho prvku (alebo statora), ktorý je prirodzene spojený s povahou pohybu vozidiel.
Ďalšia, nemenej dôležitá okolnosť súvisí s nezávislosťou ťažnej sily od adhéznej sily kolies ku koľajnici, ktorá je pre bežné elektrické trakčné systémy nedosiahnuteľná. Zrýchlenia a rýchlosti vozidiel pri použití lineárnych motorov preto môžu byť ľubovoľne vysoké a sú obmedzené len komfortom pohybu, povolenou rýchlosťou odvaľovania kolies na koľajovej trati a ceste, dynamická stabilita podvozok dopravy a cesty. Je vylúčené pri použití lineárnych motorov a preklzávaní kolies elektrických vozidiel.
Jedna z možných konštrukčných schém na spojenie lineárneho motora s koľajnicovým motorom vozidlo znázornené na obr. 5.
Lineárny motor namontovaný na podvozku 3 koľajového vozidla má vyhotovenie s obojstranným statorom 1. Sekundárnym prvkom je medzi koľajnicami pripevnený pás 2. Napätie na stator motora sa privádza pomocou klzných kontaktov. Známe sú aj konštrukcie lineárnych motorov, kde sekundárnym prvkom je koľajnica a prvky nosnej konštrukcie. Takéto schémy sú typické najmä pre jednokoľajových cestujúcich a nákladných cestách a mechanizmy pre pohyblivé žeriavy. Na obr. 6 znázorňuje ako príklad domáci lineárny motor navrhnutý pre jednokoľajovú dráhu. Tento motor má obojstranný stator 1 s vinutím 2, vo vnútri ktorého je sekundárny prvok vo forme pásu 3. Stator motora sa po páse pohybuje pomocou ložiskových valčekov 5. Valčeky 4 slúžia na vzájomné upevnite stator a sekundárny prvok v horizontálnom smere.
Ryža. 6

Ryža. 7
Na obr. 7 je znázornený príklad použitia lineárnych asynchrónnych motorov pre mechanizmy na prepravu tovaru rôznych produktov.
Dopravník určený na presun sypkého materiálu 1 z násypky 2 má kovový pás 3 pripevnený na bubnoch 4. Kovový pás prechádza vnútri statorov 5 lineárneho motora, ktorý je sekundárnym prvkom. Použitie lineárneho motora v tomto prípade umožňuje znížiť predbežné napnutie pásu a eliminovať jeho sklz, zvýšiť rýchlosť a spoľahlivosť dopravníka.
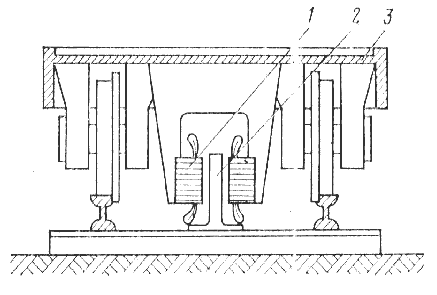
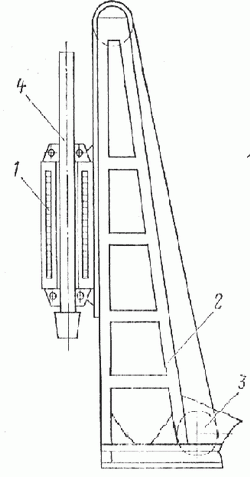
Veľkým záujmom je použitie lineárneho motora pre bicie stroje, ako sú baranidlá používané v práce na ceste a stavebníctvo. Štrukturálny diagram takéhoto kladiva je znázornený na obr. 8. Stator lineárneho motora 1 je umiestnený na výložníku kladiva 2 a môže sa pomocou navijaka 3 pohybovať po vedeniach výložníka vo vertikálnom smere. Nárazová časť kladiva 4 je zároveň sekundárnym prvkom motora .
Na zdvihnutie nárazovej časti kladiva sa motor zapne tak, aby bežecké pole smerovalo nahor. Keď sa šoková časť blíži k extrému horná pozícia motor sa vypne a nárazová časť pôsobením gravitácie spadne na hromadu. V niektorých prípadoch nie je motor vypnutý, ale obrátený, čo umožňuje zvýšiť energiu nárazu. Ako sa hromada prehlbuje, stator motora sa pohybuje dole pomocou navijaka.
Ryža. osem
Elektrické kladivo sa ľahko vyrába, nevyžaduje zvýšenú presnosť pri výrobe motorov, nie je citlivé na zmeny teploty a môže začať pracovať takmer okamžite.
3. Lineárny jednosmerný motor.
Spolu s asynchrónnymi lineárnymi motormi sa používajú jednosmerné lineárne motory. Najčastejšie sa používajú na získanie malých pohybov pracovných telies a súčasne poskytujú vysokú presnosť a významné štartovacie sily.
3.1 Konštrukcia a princíp činnosti.
Lineárne jednosmerné motory pozostávajú z kotvy, na ktorej je umiestnené vinutie, ktoré súčasne slúži ako kolektor (vodiaci prvok), a z otvoreného magnetického obvodu s budiacimi vinutiami (pohyblivá časť) umiestnených tak, že vektory síl vznikajúcich pod pólmi magnetický obvod má rovnaký smer. Lineárne jednosmerné motory (rovnako ako motory s rotačným pohybom) navyše umožňujú v prípade potreby jednoducho nastaviť rýchlosť pohybu pracovných telies.
3.2 Aplikácia.
Na obr. 9 je znázornená schéma lineárneho jednosmerného motora, ktorý sa používa na pohyb priemyselných výrobkov. Tento motor je v podstate jednosmerný motor s dutou valcovou kotvou, rozrezaný pozdĺž tvoriacej čiary a umiestnený v rovine.
Ryža. 9
Pohyblivá časť motora - kotva - pozostáva z nemagnetického jadra 1 a na ňom upevneného vinutia kotvy 2, ktoré môže byť vyrobené z izolovaného drôtu vinutia alebo vyrobené z medenej fólie leptaním. Šírka závitov vinutia v smere pohybu, ako pri bežných jednosmerných motoroch, je blízka deleniu pólov (t.j. obvodová vzdialenosť medzi pólmi magnetického systému motora). Vodič k vinutiu sa uskutočňuje pomocou zberača 3 a kefiek 4. Na rám 5 motora je namontovaná sada pólov 6 s budiacimi vinutiami 7, umiestnených v rade v smere pohybu kotvy. Ďalšími časťami magnetického obvodu motora sú oceľové jadrá 8 a samotný rám, tiež vyrobený z feromagnetického materiálu. Kotva motora sa spolu s doskou 9 na upevnenie premiestňovaného produktu 10 pohybuje po pevných podperách 11 tak, že jej roviny s vinutiami sú vždy v medzere medzi jadrami 8 a pólmi 6. Činnosť lineárneho motora je založená na prevádzke špeciálnych čerpadiel na čerpanie elektricky vodivých kvapalín a vrátane tekutých kovov. Takéto čerpadlá, často označované ako magnetohydrodynamické čerpadlá, sú široko používané v metalurgii na dopravu, dávkovanie a miešanie tekutého kovu, ako aj v jadrových elektrárňach na čerpanie chladiacej kvapaliny tekutého kovu.
Magnetohydrodynamické čerpadlá (MHD - čerpadlá) môžu byť jednosmerné alebo striedavé. Zvážte obvod čerpadla jednosmerného prúdu.
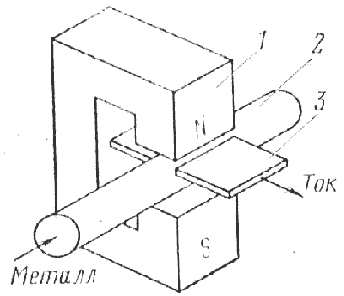
Primárnym prvkom - statorom motora je elektromagnet 1 v tvare C. Vo vzduchovej medzere elektromagnetu je umiestnené potrubie 2 s tekutým kovom. Pomocou elektród 3, privarených k stenám potrubia, cez tekutý kov z externého zariadenia prechádza jednosmerný prúd. Budiace vinutie je často zapojené do série s obvodom elektród 3. Pri vybudení elektromagnetu začne na kov v zóne prechodu jednosmerného prúdu pôsobiť elektromagnetická sila. Pod vplyvom tejto sily sa kov začne pohybovať po potrubí a smer jeho pohybu sa dá ľahko určiť známym pravidlom ľavej ruky. Výhodou čerpadiel MHD je absencia pohybu mechanické časti a možnosť utesnenia kovového transportného kanála.
4. Lineárny synchrónny motor.
AT posledné roky Synchrónne lineárne motory sa používajú čoraz viac. Hlavnou oblasťou použitia týchto motorov, kde sú ich výhody najvýraznejšie, sú vysoké otáčky elektrická doprava. Faktom je, že v podmienkach bežnej prevádzky takejto dopravy je potrebné, aby medzi pohyblivou časťou a sekundárnym prvkom bola pomerne veľká vzduchová medzera. V tomto prípade má asynchrónny lineárny motor veľmi nízky účinník a jeho použitie nie je ekonomicky výhodné. Synchrónny lineárny motor na druhej strane umožňuje relatívne veľkú vzduchovú medzeru medzi statorom a sekundárnym prvkom, a preto pracuje s účinníkom blízkym jednotke.
Je potrebné poznamenať, že použitie synchrónnych lineárnych motorov vo vysokorýchlostnej doprave je spravidla kombinované s takzvaným magnetickým zavesením automobilov a použitím supravodivých magnetov a budiacich vinutí, čo umožňuje zvýšiť komfort pohybu a ekonomickej výkonnosti železničných koľajových vozidiel.
4.1 Aplikácia.
Na obr. 11 je znázornená schéma nadjazdu a elektrického vlakového vozňa s rýchlosťou 400 - 500 km/h, určeného na prepravu 100 cestujúcich.

Ryža. jedenásť
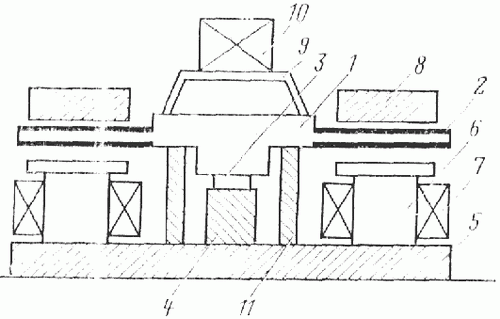
Trakčný synchrónny lineárny motor je elektromagneticky budený pomocou supravodivých magnetov. Budiace vinutie 1 pozostáva z radu cievok rovnomerne upevnených pod spodkom vozňa 5. V kryogénnom chladiacom systéme vinutí sa používa tekuté hélium. Ploché trojfázové vinutie variabilného meniča, ktorý premieňa jednosmerné napätie na trojfázové striedavé napätie.
Invertor slúži na rozbeh, zmenu rýchlosti a brzdenie vlaku.
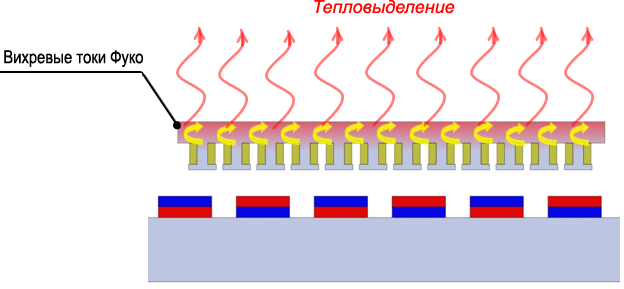
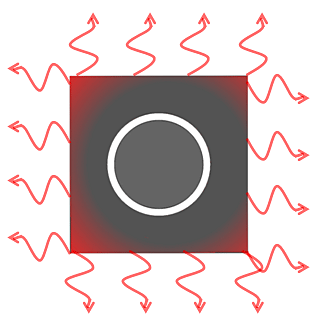
Viadukt 6 je betónové plátno, ktorého plochý charakter povrchu je zvolený tak, aby sa znížilo hromadenie ľadu a snehu. Auto je zavesené nad vozovkou vo výške 15 cm pomocou špeciálneho magnetického závesného systému. Tento systém pozostáva z podlhovastých supravodivých elektromagnetov 3, umiestnených pozdĺž okrajov spodku auta, z plochých hliníkových pásikov 4, upevnených v vozovke. Princíp činnosti systému magnetického pruženia je založený na pôsobení elektrodynamických síl vznikajúcich pri interakcii tokov supravodivých elektromagnetov 3 na palube auta a vírivých prúdov indukovaných v hliníkových pásoch 4. Výpočty ukázali, že pri použití magnetického odpruženia sa hmotnosť auta je o 20 ton menej ako so systémom vzduchových vankúšov.
Poskytnúť stabilita rolovania vlakov počas jeho pohybu sa používa špeciálny stabilizačný systém. Zabezpečuje položenie prídavného vinutia pozdĺž osi vozovky a je založené na interakcii prúdov v tomto vinutí s poľom trakčných elektromagnetov. Vyvinutý elektrický trakčný systém využívajúci vyššie popísaný synchrónny lineárny motor má dobrý výkon, ale pre jeho prevádzku je potrebné uložiť vinutia v podloží, čo zvyšuje náklady na výrobu systému a komplikuje jeho údržbu, najmä pri značnej dĺžke cesta. V tomto ohľade boli vyvinuté konštrukcie lineárnych synchrónnych motorov, ktoré nevyžadujú uloženie vinutí v železničnej trati. Patria sem lineárne synchrónne motory s takzvaným unipolárnym budením a pazúrovitými pólmi. Motory oboch verzií slúžili na pohon 50-tonového vlaku s rýchlosťou 480 km/h.

Na obr. 12 je znázornená schéma synchrónneho lineárneho motora s unipolárnym budením. Motor má dva statory 1 namontované na pohyblivej časti zostavy. Pohyblivé magnetické pole sa vytvára pomocou vinutí 2 pripojených k sieti striedavého prúdu. Statory sú spojené magnetickým obvodom 3, na ktorom je umiestnené unipolárne budiace vinutie 4. Toto vinutie vytvára smerovo konštantný magnetický tok, ktorý prestupuje feromagnetický sekundárny prvok 5, ktorý je umiestnený v magnetickom obvode. Interakcia pohybujúceho sa magnetického poľa so zmagnetizovaným sekundárnym prvkom vytvára ťažnú silu koľajového vozidla.
Porovnanie lineárnych synchrónnych motorov s unipolárnym budením a pazúrovitými pólmi s asynchrónnym lineárnym motorom pre rovnakú ťažnú silu ukázalo, že tento má horší účinník (asi 0,6), nižšiu účinnosť (asi 80%) a veľkú hmotnosť na jednotkový výkon motora.
5. Záver.
Použitie lineárnych elektromotorov umožňuje zjednodušiť alebo úplne vylúčiť mechanická prevodovka, zvýšiť efektivitu a spoľahlivosť pohonu a výrobného mechanizmu ako celku.
6. Zoznam referencií.
1. V.V. Maskalenko, Elektromotoryšpeciálneho určenia, Energoizdat 1981.
2. Kavalev Yu.M., Elektrické autá, - M .: Energia, 1989.




