สลิปของมอเตอร์แบบอะซิงโครนัสคืออะไร หลักการทำงานของมอเตอร์แบบอะซิงโครนัส ลื่น
หน้า 2
W nominal slip อยู่ที่ประมาณ 6 ถึง 2% ตามลำดับ
กำหนดสลิปเล็กน้อยของอะซิงโครนัส มอเตอร์สามเฟส, โรเตอร์ที่หมุนด้วยความถี่ d2900 rpm ถ้าความถี่ซิงโครนัสของการหมุนของสนามแม่เหล็กคือ u3000 rpm
กำหนดสลิปเล็กน้อยของมอเตอร์สามเฟสแบบอะซิงโครนัสซึ่งโรเตอร์จะหมุนที่ความถี่ n 2900 รอบต่อนาทีหากความถี่การหมุนของสนามแม่เหล็กแบบซิงโครนัสเท่ากับ nl 3000 รอบต่อนาที
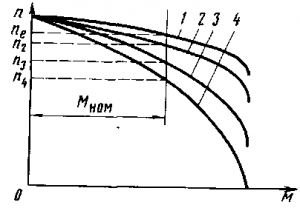
ค่าของสลิปเล็กน้อยขึ้นอยู่กับความต้านทานของโรเตอร์ มอเตอร์ที่มีโรเตอร์แบบกรงกระรอกแบบปกติมักจะมีสลิปที่เล็กกว่าสำหรับกำลังและจำนวนขั้วเท่ากัน มอเตอร์เหล่านี้มี คุณสมบัติการออกแบบความต้านทานของโรเตอร์มีค่าค่อนข้างน้อยซึ่งนำไปสู่การลดลงของค่าวิกฤตสลิป SK [ สูตร (2 - 39) ] และสลิประบุ SH ด้วยเหตุผลเดียวกัน เมื่อกำลังเครื่องยนต์เพิ่มขึ้น ค่าของสลิประบุจะลดลงและความแข็งของลักษณะทางธรรมชาติเพิ่มขึ้น ส่วนหลังแสดงโดยเส้นโค้งในรูปที่ 2 - 35 สร้างขึ้นจากข้อมูลโดยเฉลี่ยสำหรับเครื่องยนต์ที่มีกำลังต่างกัน
ค่าของสลิปเล็กน้อยขึ้นอยู่กับความต้านทานของโรเตอร์ มอเตอร์ที่มีโรเตอร์แบบกรงกระรอกแบบปกติมักจะมีสลิปพิกัดที่เล็กที่สุดสำหรับกำลังและจำนวนขั้วเท่ากัน สำหรับมอเตอร์เหล่านี้ เนื่องจากคุณสมบัติการออกแบบ ความต้านทานของโรเตอร์มีค่าค่อนข้างน้อย ซึ่งทำให้ค่าของสลิปวิกฤต SK [สูตร (2 - 39)] และสลิประบุ SH ลดลง ด้วยเหตุผลเดียวกัน เมื่อกำลังเครื่องยนต์เพิ่มขึ้น ค่าของสลิประบุจะลดลงและความแข็งแกร่งของลักษณะทางธรรมชาติเพิ่มขึ้น ส่วนหลังแสดงโดยเส้นโค้งในรูปที่ 2 - 35 สร้างขึ้นจากข้อมูลโดยเฉลี่ยสำหรับเครื่องยนต์ที่มีกำลังต่างกัน
| เส้นโค้งเชิงทฤษฎีและเชิงปฏิบัติของการพึ่งพาโมเมนต์ของเครื่องอะซิงโครนัสบนสลิป| เส้นโค้งของการพึ่งพาแรงบิดของมอเตอร์แบบอะซิงโครนัสบนสลิปสำหรับกรงโรเตอร์แบบต่างๆ |
การเพิ่มขึ้นของสลิปเล็กน้อยทำได้โดยการใช้กรงโรเตอร์ที่มีความต้านทานเพิ่มขึ้น
| การพึ่งพาแรงบิดของเครื่องยนต์ที่กำหนดตามโมเมนต์ความเฉื่อยของมู่เล่ที่ค่าต่าง ๆ ของสลิปพิกัด |
การเพิ่มขึ้นของสลิปเล็กน้อยสัมพันธ์กับค่าเฉลี่ยที่ลดลง ความเร็วเชิงมุมเครื่องยนต์ฝั่ง
ค่าของสลิปพิกัด SH มีตั้งแต่ 2 ถึง 12% ขึ้นอยู่กับกำลังไฟพิกัดและประเภทของมอเตอร์มาตรฐาน มอเตอร์ที่มีกำลังไฟสูงกว่ามักจะมีสลิปที่ต่ำกว่า
การเพิ่มขึ้นของสลิปมอเตอร์ที่กำหนดสามารถนำไปสู่ทั้งการลดลงและการเพิ่มขึ้นของแรงสูงสุดในแท่ง ขึ้นอยู่กับโหมดการสูบน้ำ ในกรณีนี้ การเปลี่ยนแปลงของกำลังเนื่องจากการอ่อนตัวของคุณลักษณะของเครื่องยนต์จะกลายเป็นเรื่องเล็กน้อยในกรณีทั่วไป
ตัวเลือกของสลิประบุ SH ของ AKD มีผลกระทบต่อค่า kn น้อยกว่ามากเมื่อเทียบกับการจ่ายแบบสมมาตร บ่อยครั้งในการเพิ่ม kn จำเป็นต้องลด SH อย่างไรก็ตามที่ t 15 มีหลายกรณีที่เมื่อ SH ลดลงหลายหลากของแรงบิดเริ่มต้นจะลดลง นี่คือคำอธิบายโดยข้อเท็จจริงที่ว่าสำหรับค่า SH ที่น้อยกว่า ความรีของฟิลด์ในระหว่างการเริ่มต้นจะมากกว่า อิทธิพลของความต้านทานเชิงแอ็คทีฟของสเตเตอร์สัมพัทธ์ ps และปัจจัยการกระจายมีขนาดเล็กและคลุมเครือ โดยปกติ หากสลิปวิกฤตคือ SK 1 ที่มีการจ่ายแบบสมมาตร แรงบิดเริ่มต้นหลายหลากจะเพิ่มขึ้นเล็กน้อยหรือไม่เปลี่ยนแปลงเลยเมื่อเพิ่ม ps และ c และลดลงเล็กน้อยเมื่อ SK 1
ด้วยสลิปเล็กน้อยตามสูตร (11.13) - (11.18) ประสิทธิภาพ m) P V (P A R c) และโมเมนต์เล็กน้อย Mn จะถูกกำหนด
ที่สลิปเล็กน้อยตามสูตร (11.13) - (11.18) ประสิทธิภาพ C - RK / (RA RV) และโมเมนต์เล็กน้อย Mn จะถูกกำหนด
มันถูกวัดด้วยเครื่องวัดวามเร็วหรือเครื่องกำเนิดไฟฟ้าซึ่งเชื่อมต่อโดยตรงกับเพลามอเตอร์และสลิปมอเตอร์ถูกกำหนดโดยสูตร S \u003d (n1 - n2) / n1 โดยที่ n1 \u003d 60f / p คือความเร็วซิงโครนัส n2 คือความเร็วจริง
ข้อดีของวิธีนี้ในการพิจารณาการลื่นไถลของมอเตอร์ไฟฟ้า: ความเร็วของการวัดและความสามารถในการสร้างทั้งที่ค่าคงที่และความเร็วที่เปลี่ยนแปลง ข้อเสียของวิธีการวัดนี้รวมถึงความแม่นยำต่ำของเครื่องวัดวามเร็วทั่วไป (ข้อผิดพลาด 1–8%) และความยากในการสอบเทียบ นอกจากนี้ เครื่องวัดวามเร็วไม่สามารถใช้งานได้เมื่อทำการทดสอบมอเตอร์ไฟฟ้ากำลังต่ำ เนื่องจากการสูญเสียแรงเสียดทานภายในกลไกมาตรวัดความเร็วรอบแสดงถึงภาระที่สังเกตได้
สำหรับการดำเนินการ การวัดต่างๆเครื่องวัดวามเร็วแบบแมนนวลมักจะมาพร้อมกับชุดปลายที่เปลี่ยนได้ซึ่งมีรูปร่างและวัตถุประสงค์ต่าง ๆ วางไว้ที่ส่วนท้ายของลูกกลิ้ง (รูปที่ 1) เคล็ดลับเหล่านี้ใช้กันอย่างแพร่หลายคือกรวยยางที่ติดตั้งอยู่ในตลับโลหะ เคล็ดลับทั้งหมดนี้ใช้เพื่อสัมผัสกับช่องทรงกรวยที่ส่วนท้ายของเพลา เครื่องไฟฟ้า. ทิปที่มีจุดศูนย์กลางเป็นยางจะใช้ในการวัดความถี่สูง โดยมีจุดศูนย์กลางเหล็กสำหรับความถี่ต่ำและปานกลาง
ข้าว. 1. มุมมองทั่วไปของเครื่องวัดความเร็วรอบแบบแรงเหวี่ยง IO-10 และตัวสร้างความเร็วรอบ: 1 - มาตราส่วน; 2 - ปุ่มสวิตช์; 3 - ตัวบ่งชี้ขีด จำกัด; 4 - หมุน
หากมีรอยเว้าตรงกลางเพลา ส่วนขยายจะถูกใช้ซึ่งวางบนเพลามาตรวัดความเร็ว และวางปลายที่สอดคล้องกันบนส่วนต่อขยาย ในกรณีที่ไม่มีศูนย์หรือไม่เพียงพอจะใช้รอกซึ่งถูกกดโดยพื้นผิวด้านข้าง (วงแหวนยาง) กับพื้นผิวของเพลาหมุน
ตามเงื่อนไขการวัดเฉพาะ เลือกอุปกรณ์ (ปลายส่วนต่อขยาย) ก่อนเริ่มการวัด ให้ขจัดไขมัน สิ่งสกปรก ฝุ่นออกจากศูนย์กลางของช่องหรือพื้นผิวของเพลา
ในการวัดความเร็วรอบของมอเตอร์ไฟฟ้า คุณต้องตั้งค่าขีดจำกัดการวัดที่ต้องการบนมาตรวัดความเร็วก่อน หากไม่ทราบลำดับการวัดความถี่ การวัดควรเริ่มต้นจากขีดจำกัดสูงสุดเพื่อหลีกเลี่ยงความเสียหายต่อเครื่องวัดวามเร็ว
ควรทำการวัดในช่วงเวลาสั้น ๆ (3–5 วินาที) กดปลายเครื่องวัดวามเร็วกับเพลาหมุนอย่างระมัดระวังด้วยแรงกดเล็กน้อยเพื่อให้แกนของเพลาเครื่องวัดวามเร็วตรงกับแกนของเพลาที่กำลังวัดหรือ, เมื่อใช้รอกจะขนานกับมัน

หากสลิปไม่เกิน 5% สามารถวัดความเร็วในการหมุนได้โดยวิธีสโตรโบสโคปิกโดยใช้หลอดนีออน
ที่ส่วนท้ายของเพลามอเตอร์ จะใช้เส้นไดอะเมทริกกับชอล์ค ระหว่างการทำงานของเครื่องยนต์ ไฟนีออนที่ขับเคลื่อนโดยเครือข่ายความถี่เดียวกับเครื่องยนต์จะสว่างขึ้น ผู้สังเกตเห็นที่ปลายเพลาไม่ใช่เส้น แต่เป็นดาวที่ค่อยๆ หมุนไปตามทิศทางการหมุนของเพลา จำนวนรังสีของดาวขึ้นอยู่กับจำนวนเสาคู่ของเครื่องยนต์และตำแหน่งของหลอดไฟนีออน หากแสงจากอิเล็กโทรดทั้งสองของหลอดไฟตกที่ปลายก้าน จำนวนรังสีของดาวปรากฏคือ 2p หากปลายก้านที่มีเส้นชอล์กส่องสว่างด้วยอิเล็กโทรดเพียงขั้วเดียว จำนวนรังสีของดาวปรากฏจะเท่ากับจำนวนขั้วคู่
ในช่วงเวลา t (ปกติคือ 30 วินาที) ซึ่งวัดโดยนาฬิกาจับเวลา จะนับจำนวนรังสีของดาวปรากฏ m ที่ผ่านตำแหน่งแนวตั้ง เนื่องจากจำนวนรังสีของดาวปรากฏเป็น 2p การเลื่อน
![]()
โดยที่ f1 คือความถี่ของเครือข่ายที่ป้อนหลอดนีออน
ด้วย f1= 50 Hz
![]()
อีกรูปแบบหนึ่งของวิธีสโตรโบสโคปมีดังนี้ หนึ่งในดิสก์ได้รับการแก้ไขบนเพลามอเตอร์จากด้านท้าย ( รูปที่ 2) ประกอบวงจร (รูปที่ 3) ในเครื่องไบโพลาร์ ดิสก์ซึ่งถูกกำหนดให้เป็น 2p = 2 ถูกตรึงบนเพลาและส่องสว่างด้วยหลอดนีออนพร้อมอิเล็กโทรดแพทช์

ข้าว. 2. รูปภาพของแผ่นสโตรโบสโคปิกขึ้นอยู่กับจำนวนเสาคู่ มอเตอร์แบบอะซิงโครนัส
ข้าว. 3 . โครงร่างสำหรับการเปิดหลอดนีออนสำหรับวิธีสโตรโบสโคปเพื่อกำหนดสลิป: 1 - หลอดนีออน, 2 - ดิสก์สโตรโบสโคป, 3 - ขดลวดเหนี่ยวนำ
โรเตอร์หมุนไม่ตรงและล้าหลังสนาม เพื่อให้เห็นจานหมุนช้าๆ ในทิศทางตรงกันข้ามกับการหมุนของโรเตอร์ ถ้า m ส่วนสีดำผ่านจุดคงที่ (ลูกศรติดอยู่บนแบริ่ง) ในเวลา t ค่าสลิปจะถูกกำหนดโดยนิพจน์
![]()
การนับของส่วนที่ผ่านโดยจุดคงที่ไม่ควรเริ่มตั้งแต่วินาทีที่นาฬิกาจับเวลาเริ่มต้น แต่ควรเริ่มจากช่องถัดไปของเครื่องหมาย
เพื่อให้ได้ภาพที่คมชัด ควรใช้แรงดันไฟฟ้ากับหลอดไฟ ซึ่งส่วนโค้งจะแสดงในรูปที่ สี่. หลอดไฟจะติดไฟในขณะที่แรงดันไฟฟ้าที่ขั้วถึงค่าที่เรียกว่าเกณฑ์การจุดระเบิด
ข้าว. 4
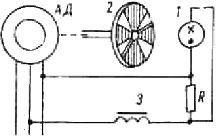
การหาค่ามอเตอร์สลิปโดยใช้ขดลวดเหนี่ยวนำ วิธีนี้ขึ้นอยู่กับการควบคุมความถี่ของการหมุนของฟลักซ์การกระเจิงของโรเตอร์ Fr (รูปที่ 5) ซึ่งด้วยความถี่ตามสัดส่วนกับการสลิปจะตัดผ่านการหมุนของขดลวดเหนี่ยวนำ
ข้าว. 5. แบบแผนสำหรับการวัดการลื่นของโรเตอร์ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสโดยใช้ขดลวดเหนี่ยวนำ
มิลลิโวลต์มิเตอร์ที่มีความละเอียดอ่อนเชื่อมต่อกับขั้วคอยล์ (ควรมีศูนย์อยู่ตรงกลางของสเกล) ขดลวดถูกวางไว้ที่ส่วนท้ายของเพลาโรเตอร์ เมื่อหมุนคอยล์ไปในทิศทางที่ต่างกัน พวกมันจะพบตำแหน่งที่สังเกตการแกว่งสูงสุดของเข็มเครื่องมือ ตามจำนวนการแกว่งที่สมบูรณ์ k สำหรับเวลา t ค่าสลิปจะถูกคำนวณ
และที่ f = 50 Hz
ขดลวดรีเลย์หรือคอนแทคเตอร์สามารถใช้เป็นขดลวดเหนี่ยวนำได้ กระแสตรงมี 10-20,000 รอบ (หรือม้วนขดลวดอย่างน้อย 3000 รอบ) เพื่อเพิ่มฟลักซ์แม่เหล็ก แกนจะถูกแทรกเข้าไปในขดลวด โดยคัดเลือกจากเหล็กหม้อแปลงหลายแถบ วิธีขดลวดเหนี่ยวนำนั้นง่ายมากและเหมาะสำหรับเครื่องจักรทุกประเภท
สำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีเฟสโรเตอร์ นอกเหนือจากวิธีการที่อธิบายไว้ข้างต้นแล้ว สามารถกำหนดสลิปได้โดยใช้แอมมิเตอร์แบบแม่เหล็กที่รวมอยู่ในเฟสหนึ่งของโรเตอร์ และหากมีความต้านทานแบบเปลี่ยนไม่ได้ในวงจรโรเตอร์ ให้ใช้ โวลต์มิเตอร์ที่ติดอยู่กับวงแหวนโรเตอร์ ขอแนะนำให้ใช้เครื่องมือที่มีมาตราส่วนสองด้าน การลื่นของมอเตอร์เหนี่ยวนำคำนวณจากจำนวนการแกว่งที่สมบูรณ์ของเข็มเครื่องมือ เช่นเดียวกับเมื่อใช้วิธีการกับขดลวดเหนี่ยวนำ

ในกระบวนการปฏิสัมพันธ์ของสนามแม่เหล็กและกระแสในโรเตอร์ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส แรงบิดจะถูกสร้างขึ้นซึ่งช่วยให้คุณปรับความเร็วของสเตเตอร์ โรเตอร์ และการหมุนของสนามแม่เหล็กไฟฟ้าให้เท่ากัน ปริมาณสลิปถูกกำหนดโดยความเร็วของการหมุนของโรเตอร์ สเตเตอร์ และสนามแม่เหล็ก
สิ่งที่กำหนดปริมาณสลิปของมอเตอร์ไฟฟ้า
- ตามกฎแล้วสลิปค่อนข้างเล็กเมื่อมอเตอร์ทำงานที่พิกัดโหลด ตัวอย่างเช่น เมื่อมอเตอร์ไฟฟ้าทำงานที่ 1500 รอบต่อนาที สลิปอยู่ที่ 2.7%
- มอเตอร์แบบอะซิงโครนัสไม่สามารถบรรลุความเร็วแบบซิงโครนัสได้แม้ว่าจะถอดกลไกออกแล้วก็ตาม ตัวนำของโรเตอร์จะไม่ตัดกับสนามแม่เหล็ก จะไม่มี EMF อยู่ในนั้น และด้วยเหตุนี้จึงไม่มีกระแส ในกรณีนี้ โมเมนต์อะซิงโครนัสจะเท่ากับศูนย์
- ในขณะที่สตาร์ทเครื่อง กระแสที่สอดคล้องกับความถี่ไฟหลักจะเข้าสู่ขดลวดของโรเตอร์ ขณะที่มันเร่งขึ้น ความถี่ของกระแสจะถูกกำหนดโดยสลิป ในกรณีนี้ความต้านทานของโรเตอร์จะขึ้นอยู่กับความถี่ของกระแส ค่ารีแอกแตนซ์อุปนัยจะเพิ่มขึ้นเมื่อความถี่ของกระแสเพิ่มขึ้น
- ค่าความต้านทานที่เท่ากันจะเปลี่ยนตามกฎของฟิสิกส์ หากมอเตอร์สลิปลดลง ความต้านทานจะเพิ่มขึ้นตามไปด้วย
- ที่แรงบิดเริ่มต้นจนกระทั่งสลิปพัฒนาภายใน 0.15 แรงต้านทานจะลดลงเล็กน้อย ที่ ทำงานต่อไปตรงกันข้ามจะลดลงอย่างรวดเร็ว ขนาดของแรงบิดถูกกำหนดโดยขนาดที่สอดคล้องกันของฟลักซ์แม่เหล็ก กระแสที่เข้ามา และการเปลี่ยนแปลงระหว่างพารามิเตอร์ EMF กระแสในโรเตอร์ การพึ่งพาแรงบิดสลิปและแรงดันไฟฟ้าที่มีความถี่เกิดขึ้นในระหว่างการศึกษาลักษณะทางเทคนิคโดยผู้ผลิตมอเตอร์ไฟฟ้า
การกำหนดปริมาณของมอเตอร์สลิป
โมเมนต์ที่กำหนดไว้ล่วงหน้าในสัดส่วนโดยตรงกับสลิปคือค่าเริ่มต้นของช่วงเวลาที่มอเตอร์ยังคงนิ่งอยู่ ค่าสลิปสูงสุดเรียกว่าวิกฤต
ผู้เชี่ยวชาญของผู้ผลิตทำการคำนวณเฉพาะและระบุไว้ในส่วนที่เกี่ยวข้อง ข้อกำหนดทางเทคนิคติดกับมอเตอร์ไฟฟ้าเมื่อซื้อ ด้วยการเพิ่มความต้านทานแบบแอคทีฟของโรเตอร์เท่านั้น ค่าของสลิปวิกฤตจะเพิ่มขึ้นและความเร็วของการหมุนของเพลาจะลดลง คุณสามารถเปลี่ยนพารามิเตอร์เหล่านี้ได้โดยใช้ความต้านทานเพิ่มเติม ซึ่งถูกนำไปใช้กับวงจรขดลวดของโรเตอร์
ดังที่คุณทราบ โรเตอร์ มอเตอร์เหนี่ยวนำหมุนไปในทิศทางเดียวกับสนามแม่เหล็กด้วยความเร็วที่ต่ำกว่าความเร็วในการหมุนของสนามเล็กน้อย เนื่องจากภายใต้เงื่อนไขนี้เท่านั้นที่ EMF และกระแสจะเหนี่ยวนำให้เกิดในการหมุนของโรเตอร์และแรงบิดจะกระทำต่อโรเตอร์
เราหมายถึงความเร็วการหมุนของสนาม (ความเร็วซิงโครนัส) ผ่านและความเร็วการหมุนของโรเตอร์ผ่าน 2 จากนั้นความแตกต่าง 3 ที่เรียกว่าความเร็วการลื่นจะเป็นความเร็วของโรเตอร์ที่สัมพันธ์กับสนามและอัตราส่วนของความเร็วสลิปต่อความเร็วซิงโครนัส แสดงเป็นเปอร์เซ็นต์ เรียกว่า สลิป4
![]()
เราแสดงสลิปในแง่ของความเร็วเชิงมุมของการหมุนของสนามและโรเตอร์
![]()
![]()
เราแทนที่นิพจน์ผลลัพธ์ลงในสูตรสลิป (5.7)
![]()
ให้เราค้นหาผลกระทบของการลื่นต่อกำลังที่พัฒนาโดยเครื่องยนต์
ให้กำลังที่เครื่องยนต์ใช้ไปเป็นกำลังที่โรเตอร์พัฒนาขึ้นระหว่างการหมุน แล้ว
เส้นรอบวงของโรเตอร์ R คือรัศมี และเป็นแรงที่กระทำต่อโรเตอร์ (ตามลำดับแม่เหล็กไฟฟ้าและกลไก) แล้ว
![]()
รับอัตราส่วนที่เราได้รับ:
![]()
แต่ (แรงทั้งสองเป็นแม่เหล็กไฟฟ้าและในสถานะการหมุนคงที่ การกระทำจะเท่ากับปฏิกิริยา) แล้ว
ในที่สุดเราก็มี:
![]()
จากความสัมพันธ์ที่ได้รับ พลังงานที่พัฒนาขึ้นโดยโรเตอร์ของมอเตอร์แบบอะซิงโครนัสขึ้นอยู่กับสลิป 5
หากสลิปแสดงเป็นเปอร์เซ็นต์ พลังงานที่ใช้โดยมอเตอร์จากเครือข่ายจะถูกแปลงเป็นพลังงานกล และพลังงานที่เหลือจะถูกใช้ไปเพื่อครอบคลุมการสูญเสียในมอเตอร์ ดังนั้น เพื่อให้ได้ ประสิทธิภาพสูงสลิปเครื่องยนต์ต้องทำให้เล็กที่สุด
ในทางปฏิบัติสำหรับมอเตอร์ที่มีกำลังตั้งแต่ 1 ถึง 1,000 kVA ที่โหลดพิกัด สลิปอยู่ที่ 3-6% และกำลังสูง - 1-3% ดังนั้นที่ความเร็วการหมุนของสนามแม่เหล็กที่ 3000, 1500 และ 1,000 รอบต่อนาที ความเร็วของโรเตอร์มักจะมีค่า 2800, 1410 และ 930 รอบต่อนาที ตามลำดับ
37. การควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัส
ความเร็วมอเตอร์เหนี่ยวนำ
น = น 1 (1 – s) = (60f 1 /p) (1-s) (85)
จากนิพจน์นี้จะเห็นได้ว่าสามารถปรับได้โดยการเปลี่ยนความถี่ ฉ 1 แรงดันไฟ จำนวนเสาคู่ Rและ
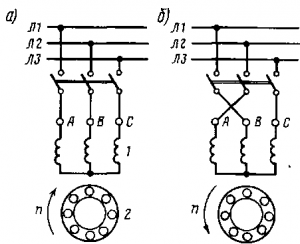
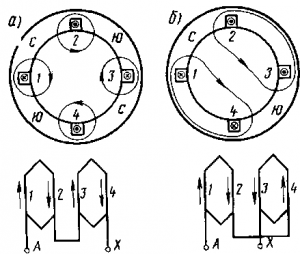 ข้าว. 266. โครงการเปลี่ยนขดลวดของขดลวดสเตเตอร์ (เฟสเดียว) เพื่อเปลี่ยนจำนวนเสา: a - มีสี่เสา; b - มีสองขั้ว
ข้าว. 266. โครงการเปลี่ยนขดลวดของขดลวดสเตเตอร์ (เฟสเดียว) เพื่อเปลี่ยนจำนวนเสา: a - มีสี่เสา; b - มีสองขั้ว
สลิป หลังสำหรับค่าที่กำหนดของโมเมนต์บนเพลา M ต่อและความถี่ f 1 สามารถเปลี่ยนได้โดยการรวมรีโอสแตตในวงจรขดลวดของโรเตอร์
ระเบียบโดยการเปลี่ยนจำนวนเสาคู่วิธีนี้ช่วยให้คุณเปลี่ยนความเร็วได้ทีละขั้น เพื่อจุดประสงค์นี้ แต่ละขดลวด 1, 2 และ 3, 4 ที่ประกอบเป็นหนึ่งเฟส (รูปที่ 266) จะถูกเปลี่ยนเพื่อให้ทิศทางของกระแสในพวกมันเปลี่ยนไปตามนั้น (ตัวอย่างเช่น จากการเชื่อมต่อแบบพยัญชนะแบบอนุกรมไปเป็นอันตรงข้าม) . ด้วยการรวมพยัญชนะของขดลวด (รูปที่ 266, a) จำนวนเสาคือสี่โดยมีการรวมที่ตรงกันข้าม (รูปที่ 266, b) - สอง ขดลวดของอีกสองเฟสซึ่งขยับในอวกาศ 120 °เชื่อมต่อในลักษณะเดียวกัน การลดจำนวนขั้วสามารถทำได้โดยการเปลี่ยนคอยส์จากซีรีย์เป็น การเชื่อมต่อแบบขนาน. เมื่อจำนวนขั้วเปลี่ยนแปลง ความเร็วในการหมุน n 1 ของสนามแม่เหล็กของมอเตอร์จะเปลี่ยนไป ด้วยเหตุนี้ ความเร็วในการหมุน n ของโรเตอร์ หากคุณต้องการความเร็วสามหรือสี่ n 1 ขดลวดอีกอันจะถูกวางบนสเตเตอร์เมื่อสลับซึ่งคุณจะได้รับความถี่เพิ่มอีกสองความถี่ มีเครื่องยนต์ที่ให้การเปลี่ยนแปลงความเร็ว n 1 ที่แรงบิดสูงสุดคงที่หรือกำลังคงที่โดยประมาณ (รูปที่ 267)
ในมอเตอร์แบบอะซิงโครนัส จำนวนขั้วของโรเตอร์ต้องเท่ากับจำนวนเสาสเตเตอร์ ในโรเตอร์กรงกระรอก เงื่อนไขนี้จะเป็นไปตามอัตโนมัติและไม่จำเป็นต้องมีการเปลี่ยนแปลงในขดลวดโรเตอร์เมื่อเปลี่ยนขดลวดสเตเตอร์
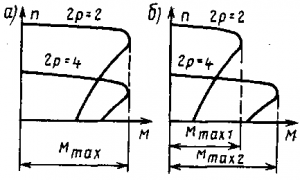 ข้าว. 267. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสสองความเร็วที่มีแรงบิดสูงสุดคงที่ (a) และกำลังคงที่ (b)
ข้าว. 267. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสสองความเร็วที่มีแรงบิดสูงสุดคงที่ (a) และกำลังคงที่ (b)
 ข้าว. 268. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสเมื่อควบคุมความเร็วในการหมุนโดยรวมรีโอสแตทไว้ในวงจรขดลวดของโรเตอร์
ข้าว. 268. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสเมื่อควบคุมความเร็วในการหมุนโดยรวมรีโอสแตทไว้ในวงจรขดลวดของโรเตอร์
 ข้าว. 269. แบบแผนสำหรับการเชื่อมต่อมอเตอร์แบบอะซิงโครนัสกับเครือข่ายเมื่อเปลี่ยนทิศทางการหมุน
ข้าว. 269. แบบแผนสำหรับการเชื่อมต่อมอเตอร์แบบอะซิงโครนัสกับเครือข่ายเมื่อเปลี่ยนทิศทางการหมุน
อันเป็นผลมาจากการทำงานร่วมกันของสนามแม่เหล็กกับกระแสในโรเตอร์ของมอเตอร์แบบอะซิงโครนัสทำให้เกิดแรงบิดทางไฟฟ้าซึ่งมีแนวโน้มที่จะทำให้ความเร็วในการหมุนของสนามแม่เหล็กของสเตเตอร์และโรเตอร์เท่ากัน
ความแตกต่างระหว่างความเร็วการหมุนของสนามแม่เหล็กของสเตเตอร์และโรเตอร์ มอเตอร์แบบอะซิงโครนัสลักษณะ ค่าสลิป s = (n1 - n2 ) / n2 โดยที่ n1 — ความเร็วในการหมุนสนามซิงโครนัส, รอบต่อนาที,น2 - ความเร็วในการหมุนของโรเตอร์ของมอเตอร์แบบอะซิงโครนัส rpmเมื่อทำงานกับโหลดที่กำหนด สลิปมักจะไม่เพียงพอ ดังนั้นสำหรับมอเตอร์ไฟฟ้า เช่น n1 = 1500 rpm, n2 = 1460 rpm สลิปคือ: s = ((1500 - 1460) / 1500) x 100 = 2.7%
มอเตอร์แบบอะซิงโครนัสไม่สามารถเข้าถึงความเร็วของการหมุนแบบซิงโครนัสได้แม้จะมีกลไกที่ไม่ได้เชื่อมต่อสามตัว เนื่องจากด้วยกลไกนี้ ตัวนำของโรเตอร์จะไม่ถูกสนามแม่เหล็กข้าม จะไม่มี EMF เกิดขึ้นและจะไม่มีกระแสไฟฟ้าเกิดขึ้น โมเมนต์อะซิงโครนัสที่ s = 0 จะเท่ากับศูนย์
 ในช่วงเวลาเริ่มต้นเริ่มต้น กระแสจะไหลในขดลวดของโรเตอร์ด้วยความถี่ไฟหลัก เมื่อโรเตอร์เร่งความเร็ว ความถี่ของกระแสในนั้นจะถูกกำหนด เลื่อน มอเตอร์แบบอะซิงโครนัส: f2 = s x f1 โดยที่ f1 คือความถี่ของกระแสที่จ่ายให้กับสเตเตอร์
ในช่วงเวลาเริ่มต้นเริ่มต้น กระแสจะไหลในขดลวดของโรเตอร์ด้วยความถี่ไฟหลัก เมื่อโรเตอร์เร่งความเร็ว ความถี่ของกระแสในนั้นจะถูกกำหนด เลื่อน มอเตอร์แบบอะซิงโครนัส: f2 = s x f1 โดยที่ f1 คือความถี่ของกระแสที่จ่ายให้กับสเตเตอร์
ความต้านทานของโรเตอร์ขึ้นอยู่กับความถี่ของกระแสในขณะที่ยิ่งความถี่สูง ความต้านทานอุปนัยก็จะยิ่งมากขึ้น ด้วยการเพิ่มความต้านทานอุปนัยของโรเตอร์ การเลื่อนเฟสระหว่างแรงดันและกระแสในขดลวดสเตเตอร์จะเพิ่มขึ้น
เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัส ตัวประกอบกำลังจึงต่ำกว่าระหว่างการทำงานปกติอย่างมาก มูลค่าปัจจุบันถูกกำหนด ค่าความต้านทานมอเตอร์เทียบเท่าและแรงดันไฟฟ้าที่ใช้
ค่าความต้านทานเทียบเท่าของมอเตอร์เหนี่ยวนำที่มีการกำหนดค่าสลิปแตกต่างกันไปตาม กฎหมายที่ซับซ้อน. เมื่อสลิปลดลงภายในขอบเขต 1 - 0.15 แนวต้านจะเพิ่มขึ้น โดยปกติน้อยกว่า 1.5 เท่า ภายในขอบเขตตั้งแต่ 0.15 ถึง sn om 5-7 เท่าเมื่อเทียบกับค่าเริ่มต้นเมื่อเริ่มต้น
ขนาดกระแสจะเปลี่ยนกลับตามสัดส่วนการเปลี่ยนแปลงของแนวต้านที่เท่ากัน ดังนั้น เมื่อเริ่มต้นถึงสลิปของลำดับที่ 0.15 กระแสจะลดลงแบบไม่มีความสำคัญ และในอนาคตจะลดลงอย่างรวดเร็ว
แรงบิดของมอเตอร์ถูกกำหนดโดยขนาดของฟลักซ์แม่เหล็ก กระแสและการเปลี่ยนแปลงเชิงมุมระหว่าง EMF และกระแสในโรเตอร์ ในทางกลับกัน ค่าใดๆ เหล่านี้จะขึ้นอยู่กับสลิป ดังนั้น เพื่อศึกษาประสิทธิภาพของมอเตอร์แบบอะซิงโครนัส การพึ่งพาแรงบิดบนสลิป และผลกระทบของแรงดันและความถี่ที่ให้มา
แรงบิดยังสามารถกำหนดได้จาก พลังงานไฟฟ้าบนเพลาเป็นอัตราส่วนของกำลังนี้ต่อความเร็วเชิงมุมของโรเตอร์ ปริมาณของแรงบิดเป็นสัดส่วนกับกำลังสองของแรงดันและแปรผกผันกับกำลังสองของความถี่
 ค่าแรงบิดที่สอดคล้องกันขึ้นอยู่กับสลิป (หรือความเร็ว) คือ ค่าช่วงเวลาเริ่มต้น(เมื่อมอเตอร์อยู่กับที่) ค่าที่สุดของช่วงเวลา(และสลิปที่สอดคล้องกันเรียกว่าวิกฤต) และ ค่าเล็กน้อยของโมเมนต์ในขีด จำกัด ความเร็วจากสถานะนิ่งถึงค่าเล็กน้อย.
ค่าแรงบิดที่สอดคล้องกันขึ้นอยู่กับสลิป (หรือความเร็ว) คือ ค่าช่วงเวลาเริ่มต้น(เมื่อมอเตอร์อยู่กับที่) ค่าที่สุดของช่วงเวลา(และสลิปที่สอดคล้องกันเรียกว่าวิกฤต) และ ค่าเล็กน้อยของโมเมนต์ในขีด จำกัด ความเร็วจากสถานะนิ่งถึงค่าเล็กน้อย.
ค่าแรงบิดสำหรับแรงดันไฟฟ้าที่กำหนดอยู่ในแคตตาล็อกสำหรับ เครื่องจักรอิเล็กทรอนิกส์. ความรู้เกี่ยวกับช่วงเวลาเล็ก ๆ เป็นสิ่งจำเป็นในการคำนวณการยอมรับของการเริ่มต้นหรือการเริ่มต้นกลไกด้วยตัวเองด้วย โหลดเต็มที่กลไก. ดังนั้นค่าของมันสำหรับการคำนวณบางอย่างจะต้องถูกกำหนดหรือได้รับจากโรงงานที่จัดหา
ค่าของค่าสูงสุดของแรงบิดถูกกำหนดโดยความต้านทานการรั่วไหลอุปนัยของสเตเตอร์และโรเตอร์ และไม่ขึ้นอยู่กับค่าความต้านทานของโรเตอร์
คริติคอลสลิปถูกกำหนดโดยอัตราส่วนของความต้านทานของโรเตอร์ต่อความต้านทานที่เท่ากัน (ปรับโดยความต้านทานเชิงแอ็คทีฟของสเตเตอร์และความต้านทานการรั่วไหลของสเตเตอร์และโรเตอร์)
การเพิ่มขึ้นของความต้านทานแบบแอคทีฟของโรเตอร์เท่านั้นที่มาพร้อมกับการเพิ่มขึ้นของสลิปวิกฤตและการกระจัดของแรงบิดสูงสุดไปยังพื้นที่ของสลิปที่ใหญ่กว่า ( ความเร็วต่ำสุดการหมุน) ด้วยวิธีนี้ การเปลี่ยนแปลงคุณสมบัติของช่วงเวลาสามารถทำได้
ที่ มอเตอร์แบบอะซิงโครนัสในขดลวดที่มีเฟสโรเตอร์ การเปลี่ยนแปลงของแรงบิดที่สลิปต่างๆ จะดำเนินการโดยใช้ความต้านทานที่ใส่เข้าไปในวงจรขดลวดของโรเตอร์ ที่ เครื่องยนต์แบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอก การเปลี่ยนแปลงของแรงบิดสามารถทำได้โดยการแนะนำเครื่องยนต์ที่มีพารามิเตอร์ตัวแปร หรือด้วยความช่วยเหลือของตัวแปลงความถี่.
โรงเรียนช่างไฟฟ้า




