กระแสเริ่มต้นของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส วิธีการสตาร์ทมอเตอร์แบบอะซิงโครนัส
ในขณะที่เริ่มต้น ความเร็วในการหมุนของโรเตอร์มอเตอร์จะเป็นศูนย์ และสนามการหมุนจะได้รับความเร็วในการหมุนแบบซิงโครนัสในทันทีที่สัมพันธ์กับโรเตอร์ ด้วยเหตุนี้ EMF ขนาดใหญ่จึงถูกเหนี่ยวนำในการหมุนของโรเตอร์ ในกรณีนี้ กระแสของโรเตอร์และสเตเตอร์จะสูงกว่าค่าต่ำสุดหลายเท่า เนื่องจากจะเพิ่มขึ้นตามการลื่นของโรเตอร์ที่เพิ่มขึ้น กล่าวคือ ด้วยความถี่การหมุนที่ลดลง (รูปที่ 10)
เริ่มต้นปัจจุบัน มอเตอร์เหนี่ยวนำด้วยโรเตอร์กรงกระรอกสูงกว่าค่าเล็กน้อย 5-10 เท่า (แรงบิดเริ่มต้นคือ 1.1–1.8 ของค่าแรงบิดเล็กน้อย) เนื่องจากกระแสนี้ไหลผ่านขดลวดของมอเตอร์ในช่วงเวลาสั้น ๆ และเฉพาะในระหว่างกระบวนการสตาร์ทเท่านั้น หากมอเตอร์สตาร์ทไม่บ่อยนัก ก็จะไม่ทำให้มอเตอร์ร้อนเกินไป ดังนั้นการสตาร์ทมอเตอร์แบบอะซิงโครนัสจึงไม่ใช่ พลังสูงตามกฎแล้วจะทำโดยการรวมอย่างง่ายในเครือข่าย อย่างไรก็ตามกระแสไฟเริ่มต้นขนาดใหญ่ของมอเตอร์ไฟฟ้าขนาดใหญ่สำหรับการจัดหา เครือข่ายไฟฟ้าทำให้เกิดไฟกระชากที่คมชัดและมีนัยสำคัญ (โดยเฉพาะในเครือข่ายที่ใช้พลังงานต่ำ) ซึ่งส่งผลเสียต่อผู้ใช้ไฟฟ้ารายอื่นที่รวมอยู่ในเครือข่ายเดียวกัน
ดังจะเห็นได้จากรูปที่ 10 แรงบิดเริ่มต้นของมอเตอร์เหนี่ยวนำจะน้อยกว่าค่าสูงสุดอย่างเห็นได้ชัด และเมื่อโหลดบนเพลาโรเตอร์เกิน เอ็ม o เครื่องยนต์สตาร์ทไม่ติด ในเวลาเดียวกัน หากไม่ได้ตัดการเชื่อมต่อสเตเตอร์จากเครือข่าย กระแสไฟเริ่มต้นขนาดใหญ่จะทำให้เกิดความร้อนสูงเกินไปของขดลวดและความล้มเหลวของมอเตอร์
เพื่อป้องกันสถานการณ์ที่ไม่เอื้ออำนวยที่อธิบายไว้ จำเป็นต้องจำกัด เริ่มต้นปัจจุบันมอเตอร์แบบอะซิงโครนัสเมื่อจ่ายแรงดันไฟฟ้าให้กับพวกเขาหรือเพิ่มแรงบิดเริ่มต้น
ลดแรงดันไฟฟ้าบนขดลวด มอเตอร์แบบอะซิงโครนัสเมื่อเริ่มต้นทำได้หลายวิธี:
เริ่มใช้ตัวเปลี่ยนรูปแบบอัตโนมัติหรือตัวควบคุมการเหนี่ยวนำ
เริ่มต้นด้วยการเปลี่ยนสเตเตอร์ที่คดเคี้ยวจากดาวเป็นเดลต้า
เริ่มต้นด้วยการรวมความต้านทานเพิ่มเติมในขดลวดของมอเตอร์สเตเตอร์
อย่างไรก็ตาม เมื่อแรงดันเริ่มต้นลดลง แรงบิดเริ่มต้นของมอเตอร์เหนี่ยวนำก็ลดลงเช่นกัน เนื่องจากเป็นสัดส่วนกับกำลังสองของแรงดันเริ่มต้น ดังนั้น วิธีการเริ่มต้นที่ระบุจึงสามารถนำไปใช้กับมอเตอร์ขับเคลื่อนของกลไกที่ไม่ต้องการแรงบิดเริ่มต้นมากเมื่อสตาร์ทเป็นหลัก (เช่น การสตาร์ทมอเตอร์พัดลม มอเตอร์ที่ไม่ได้โหลด มอเตอร์ที่ ไม่ทำงานและอื่น ๆ.).
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีเฟสโรเตอร์เริ่มทำงานโดยใช้ลิโน่สตาร์ทที่มีความต้านทานสูงสุด Rต่อเป็นอนุกรมกับขดลวดโรเตอร์ (ดูรูปที่ 3) ในกรณีนี้ สลิปวิกฤต สถึง = ( อาร์" 2 +Rต่อ)/( X 1 +เอ็กซ์" 2) เพิ่มขึ้นและคุณค่าของช่วงเวลาวิกฤติ เอ็ม k = 3 PU 1 2 /2 1 ( X 1 +เอ็กซ์" 2) ไม่เปลี่ยนแปลง ลักษณะการลื่นไถลประดิษฐ์พร้อมความต้านทานเพิ่มเติมแสดงในรูปที่ 11. ขนาด R ext ถูกเลือกเพื่อให้สลิปวิกฤตมีค่าเท่ากับหนึ่ง จากนั้นแรงบิดเริ่มต้นจะเพิ่มขึ้นเป็นค่าวิกฤต เพิ่ม เอ็มเกิดขึ้นเนื่องจากการเพิ่มขึ้นขององค์ประกอบที่ใช้งานอยู่ในปัจจุบัน ค่าประสิทธิผลของกระแสเริ่มต้นจึงลดลง

ด้วยความเร็วที่เพิ่มขึ้นความถี่ของการหมุนของสนามแม่เหล็กที่สัมพันธ์กับโรเตอร์จะลดลง ดังนั้น EMF และกระแสของโรเตอร์จึงลดลง ดังนั้นด้วยความเร็วรอบเครื่องยนต์ที่เพิ่มขึ้น จึงสามารถค่อยๆ ลดค่าความต้านทานเริ่มต้นในวงจรขดลวดของโรเตอร์ ( R" ต่อ) โดยไม่ต้องกลัวว่ากระแสไฟของมอเตอร์จะเพิ่มขึ้นเป็นค่าที่เป็นอันตรายต่อมัน ด้วยความต้านทานของลิโน่เริ่มต้นถูกลบออกจนสุด ( R"" ต่อ = 0) การสตาร์ทเครื่องยนต์สิ้นสุดลง วิธีนี้ช่วยให้คุณกำหนดแรงบิดเริ่มต้นของเครื่องยนต์ที่จำเป็นสำหรับการสตาร์ท
ปืนกล คุณสมบัติเครื่องยนต์ .
เมื่อสตาร์ทมอเตอร์โรเตอร์เอาชนะแรงบิดโหลดและโมเมนต์ความเฉื่อยเร่งจากความเร็วรอบ พี= 0 ก่อน พี . สลิปแล้วเปลี่ยนจาก ส พี = 1 ก่อน ส . เมื่อสตาร์ทต้องปฏิบัติตามข้อกำหนดพื้นฐานสองประการ: แรงบิดต้องมากกว่าโมเมนต์ความต้านทาน ( เอ็ม vr > เอ็มกับ) และเริ่มต้นปัจจุบัน ฉัน พีควรมีขนาดเล็กที่สุด
ขึ้นอยู่กับการออกแบบของโรเตอร์ (ไฟฟ้าลัดวงจรหรือเฟส) กำลังมอเตอร์ ลักษณะของโหลด วิธีต่างๆสตาร์ท: สตาร์ทโดยตรง, เริ่มใช้ความต้านทานเพิ่มเติม, สตาร์ทด้วยแรงดันไฟฟ้าที่ลดลง ฯลฯ วิธีการเริ่มต้นต่างๆ จะกล่าวถึงในรายละเอียดเพิ่มเติมด้านล่าง
เริ่มต้นโดยตรง การสตาร์ทเครื่องยนต์โดยการเปิดสวิตช์แรงดันไฟหลักของขดลวดสเตเตอร์โดยตรงเรียกว่าการสตาร์ทโดยตรง วงจรสตาร์ทโดยตรงแสดงในรูปที่ 3.22. เมื่อเปิดสวิตช์ในวินาทีแรก สลิป ส = lและกระแสที่ลดลงในโรเตอร์และกระแสสเตเตอร์เท่ากับมัน
, (3.37)
สูงสุด (ดูข้อ 3.19 สำหรับ s=1) เมื่อโรเตอร์เร่งความเร็ว สลิปจะลดลง ดังนั้นเมื่อสิ้นสุดการสตาร์ท กระแสไฟจะน้อยกว่าช่วงแรกมาก ในมอเตอร์อนุกรมที่มีการสตาร์ทโดยตรง กระแสไฟเริ่มต้นหลายหลากหลายหลาก k I \u003d I P / I 1NOM \u003d (5, ..., 7) และค่าที่มากกว่าหมายถึงเครื่องยนต์ที่มีกำลังมากกว่า
ค่าของแรงบิดเริ่มต้นหาได้จาก (3.23) ที่ s = 1: 
จากรูป 3.18 จะเห็นได้ว่าแรงบิดเริ่มต้นนั้นใกล้เคียงกับค่าปกติและน้อยกว่าแรงบิดที่สำคัญมาก สำหรับ เครื่องยนต์อนุกรมหลายหลากของแรงบิดเริ่มต้น M P / M NOM = (1.0, ..., 1.8)
ข้อมูลแสดงให้เห็นว่าในระหว่างการสตาร์ทโดยตรง กระแสไฟกระชากเกิดขึ้นในเครือข่ายที่จ่ายมอเตอร์ ซึ่งอาจทำให้แรงดันไฟฟ้าตกมากจนมอเตอร์อื่นๆ ที่ป้อนจากเครือข่ายนี้สามารถหยุดได้ ในทางกลับกัน เนื่องจากแรงบิดเริ่มต้นเล็กน้อยเมื่อสตาร์ทภายใต้ภาระงาน มอเตอร์อาจไม่เอาชนะโมเมนต์ความต้านทานบนเพลาและจะไม่เคลื่อนที่ เนื่องจากข้อบกพร่องเหล่านี้ การสตาร์ทโดยตรงสามารถใช้ได้กับเครื่องยนต์ที่มีกำลังไฟฟ้าขนาดเล็กและขนาดกลางเท่านั้น (สูงสุดประมาณ 50 กิโลวัตต์)
สตาร์ทเครื่องยนต์พร้อมคุณสมบัติการสตาร์ทที่ดีขึ้น การปรับปรุงคุณสมบัติการเริ่มต้นของมอเตอร์แบบอะซิงโครนัสทำได้โดยใช้ผลของการกระจัดของกระแสไฟในโรเตอร์เนื่องจากการออกแบบพิเศษของกรงกระรอก เอฟเฟกต์การกระจัดปัจจุบันมีดังนี้: การเชื่อมต่อฟลักซ์และความต้านทานอุปนัย X 2 ของตัวนำในช่องโรเตอร์จะยิ่งสูง ยิ่งอยู่ใกล้ด้านล่างของสล็อตมากขึ้นเท่านั้น (รูปที่ 3.23) นอกจากนี้ X 2 ยังเป็นสัดส่วนโดยตรงกับความถี่ปัจจุบันของโรเตอร์
ดังนั้น เมื่อสตาร์ทเครื่องยนต์ เมื่อ s=1 และ f 2 = f 1 = 50 Hz ค่ารีแอกแตนซ์แบบเหนี่ยวนำ X 2 = สูงสุด และภายใต้อิทธิพลของสิ่งนี้ กระแสจะเคลื่อนเข้าสู่ชั้นนอกของร่อง ความหนาแน่นกระแส j ตามพิกัด h กระจายไปตามเส้นโค้งที่แสดงในรูปที่ 3.24 เป็นผลให้กระแสส่วนใหญ่ไหลผ่านส่วนนอกของตัวนำนั่นคือ เหนือส่วนที่เล็กกว่ามากของแกน และด้วยเหตุนี้ ความต้านทานเชิงรุกของขดลวดโรเตอร์ R 2 จึงมากกว่าด้วย ดำเนินการตามปกติ. ด้วยเหตุนี้กระแสเริ่มต้นลดลงและแรงบิดเริ่มต้น MP เพิ่มขึ้น (ดู (3.37), (3.38)) ขณะที่มอเตอร์เร่งความเร็ว สลิปและความถี่ของกระแสโรเตอร์จะลดลงและไปถึง 1-4 Hz เมื่อสิ้นสุดการสตาร์ท ที่ความถี่นี้ ค่ารีแอกแตนซ์อุปนัยมีขนาดเล็ก และกระแสจะกระจายอย่างสม่ำเสมอทั่วทั้งส่วนตัดขวางของตัวนำ ด้วยเอฟเฟกต์การเคลื่อนตัวของกระแสไฟที่แรง การสตาร์ทโดยตรงจึงเป็นไปได้ด้วยกระแสไหลเข้าที่ต่ำลงและแรงบิดในการสตาร์ทที่สูง
มอเตอร์ที่มีคุณสมบัติการสตาร์ทที่ดีขึ้น ได้แก่ มอเตอร์ที่มีโรเตอร์ร่องลึก กรงกระรอกคู่ และอื่นๆ บางตัว

รูปที่ 3.23 3.24
มอเตอร์สล็อตลึก ดังแสดงในรูปที่ 3.25 ช่องโรเตอร์ทำในรูปแบบของช่องแคบซึ่งมีความลึกมากกว่าความกว้างประมาณ 10 เท่า ขดลวดในรูปแบบของแถบทองแดงแคบ ๆ วางอยู่ในร่องร่องเหล่านี้ การกระจายฟลักซ์แม่เหล็กแสดงให้เห็นว่าค่าการเหนี่ยวนำและค่ารีแอกแตนซ์เชิงอุปนัยที่ด้านล่างของตัวนำมีค่ามากกว่าที่ด้านบนมาก ดังนั้นเมื่อสตาร์ทเครื่อง กระแสจะเคลื่อนไปที่ส่วนบนของแกนและความต้านทานแบบแอคทีฟจะเพิ่มขึ้นอย่างมาก เมื่อมอเตอร์เร่งความเร็ว สลิปจะลดลง และความหนาแน่นกระแสเหนือหน้าตัดเกือบจะเท่ากัน เพื่อเพิ่มเอฟเฟกต์ของการกระจัดปัจจุบัน ร่องลึกไม่เพียงทำในรูปแบบของช่อง แต่ยังอยู่ในรูปทรงสี่เหลี่ยมคางหมู ในกรณีนี้ ความลึกของร่องจะน้อยกว่ารูปสี่เหลี่ยมผืนผ้าเล็กน้อย

เครื่องยนต์สองกรง. ในมอเตอร์ดังกล่าว ขดลวดของโรเตอร์จะทำในรูปแบบของเซลล์สองเซลล์ (รูปที่ 3.26): ในร่องภายนอก 1 ขดลวดของตัวนำทองเหลืองวางอยู่ภายใน 2 - ขดลวดตัวนำทองแดง ดังนั้นขดลวดด้านนอกจึงมีความต้านทานเชิงรุกมากกว่าวงใน ในระหว่างการเริ่มต้น ขดลวดด้านนอกจะจับคู่กับฟลักซ์แม่เหล็กที่อ่อนมาก และขดลวดภายในที่มีสนามแม่เหล็กค่อนข้างแรง เป็นผลให้กระแสถูกผลักออกสู่เซลล์ชั้นนอก และแทบไม่มีกระแสในเซลล์ชั้นใน
ขณะที่เครื่องยนต์เร่งความเร็ว กระแสจากเซลล์ชั้นนอกจะไหลเข้าสู่เซลล์ชั้นใน และที่ s = s NOM ส่วนใหญ่จะไหลผ่านเซลล์ชั้นใน กระแสในเซลล์ชั้นนอกมีขนาดค่อนข้างเล็ก ผลลัพธ์ที่ได้คือแรงบิดเริ่มต้น ซึ่งเป็นผลรวมของโมเมนต์จากสองกรง มีขนาดใหญ่กว่ามอเตอร์แบบปกติ และค่อนข้างใหญ่กว่าสำหรับมอเตอร์แบบร่องลึก อย่างไรก็ตาม โปรดทราบว่าค่าใช้จ่ายของมอเตอร์โรเตอร์แบบกรงคู่นั้นสูงกว่า
เริ่มต้นด้วยการเปลี่ยนขดลวดสเตเตอร์
หากในระหว่างการทำงานปกติของมอเตอร์ เฟสของสเตเตอร์เชื่อมต่อเป็นรูปสามเหลี่ยม ดังแสดงในรูปที่ 3.27 เมื่อสตาร์ท เฟสของสเตเตอร์จะเชื่อมต่อกับดาวฤกษ์ ในการดำเนินการนี้ ให้เปิดสวิตช์ Q ก่อน จากนั้นจึงวางสวิตช์ S ลงในตำแหน่งลง เริ่ม. ในตำแหน่งนี้ จุดสิ้นสุดของเฟส X, Y, Z จะเชื่อมต่อถึงกัน นั่นคือ เฟสเชื่อมต่อกับดาว ในกรณีนี้ แรงดันเฟสจะน้อยกว่าแบบเชิงเส้น √3 เท่า เป็นผลให้สายปัจจุบันที่เริ่มต้นขึ้นน้อยกว่าเมื่อเชื่อมต่อในเดลต้า 3 เท่า เมื่อโรเตอร์เร่งความเร็วเมื่อสิ้นสุดการสตาร์ท สวิตช์ S จะเปลี่ยนไปที่ ตำแหน่งสูงสุดและดังที่เห็นได้จากรูปที่ 3.27 เฟสของสเตเตอร์เชื่อมต่อใหม่เป็นรูปสามเหลี่ยม ข้อเสียของวิธีนี้คือแรงบิดเริ่มต้นลดลง 3 เท่า เนื่องจากโมเมนต์เป็นสัดส่วนกับกำลังสองของแรงดันเฟส ซึ่งน้อยกว่า √3 เท่าเมื่อเฟสเชื่อมต่อกันด้วยดาว ดังนั้น วิธีนี้ใช้ได้กับแรงบิดโหลดขนาดเล็กและสำหรับมอเตอร์ที่ทำงานตามปกติเมื่อขดลวดสเตเตอร์เชื่อมต่อในเดลต้าเท่านั้น

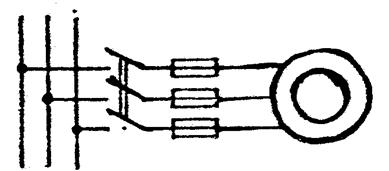
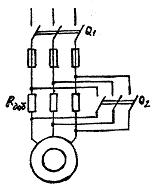
เริ่มเมื่อรวมตัวต้านทานเพิ่มเติมในวงจรสเตเตอร์ . (รูปที่ 3.28) ก่อนเริ่มต้น สวิตช์ (สตาร์ท) อยู่ในสถานะเปิดและสวิตช์ Q 1 จะปิดลง
ในกรณีนี้ตัวต้านทานเพิ่มเติม R DOB จะรวมอยู่ในวงจรสเตเตอร์ เป็นผลให้ขดลวดสเตเตอร์ถูกขับเคลื่อนโดยแรงดันไฟฟ้าที่ลดลง U 1n \u003d U 1NOM - ฉันเอ็นอาร์แอพ หลังจากที่มอเตอร์เร่งความเร็ว สวิตช์ Q 2 จะปิดลง และขดลวดสเตเตอร์จะเปิดขึ้นเป็นแรงดันไฟฟ้า U 1NOM ที่กำหนด โดยการเลือก R DOB คุณสามารถจำกัดกระแสเริ่มต้นให้เป็นกระแสที่อนุญาตได้ โปรดทราบว่าแรงบิดเริ่มต้นตามสัดส่วนของ U 2 1P จะน้อยกว่าและเป็น (U 1P / U 1NOM) 2 เล็กน้อย เป็นสิ่งสำคัญที่จะต้องทราบว่าด้วยวิธีเริ่มต้นนี้ มีการสูญเสียที่สำคัญในแนวต้าน R DOB (R DOB ฉัน 2 1น). แทนที่จะเป็นตัวต้านทาน R DOB คุณสามารถเปิดคอยส์ที่มีความต้านทานอุปนัย X DOB ใกล้กับ R DOB
การใช้ขดลวดช่วยลดการสูญเสียในการต้านทานการสตาร์ท
รูปที่ 3.29 รูปที่ 3.28
ออโต้ทรานส์ฟอร์เมอร์เริ่มทำงาน นอกจากวิธีการเหล่านี้แล้ว คุณสามารถใช้สิ่งที่เรียกว่า autotransformer start
วงจรที่เกี่ยวข้องแสดงในรูปที่ 3.29 ก่อนสตาร์ท สวิตช์ S ถูกตั้งค่าเป็นตำแหน่ง 1 จากนั้นจึงเปิดเครื่องเปลี่ยนรูปแบบอัตโนมัติและสเตเตอร์ได้รับพลังงานจากแรงดันไฟฟ้า U 1P ที่ลดลง มอเตอร์เร่งความเร็วที่แรงดันไฟฟ้าลดลงและเมื่อสิ้นสุดสวิตช์เร่งความเร็ว S ถูกตั้งค่าเป็น 2 และสเตเตอร์นั้นขับเคลื่อนด้วยแรงดันไฟฟ้า U 1nom
ถ้าอัตราส่วนการแปลงของหม้อแปลงสเต็ปดาวน์ น แล้วกระแส ฉันที่ทางเข้าจะอยู่ใน น น้อยลง นอกจากนี้กระแสเริ่มต้นก็จะเป็น น น้อยลง กล่าวคือ ปัจจุบันเมื่อเริ่มต้นในเครือข่ายจะเป็นใน น 2 น้อยกว่าการสตาร์ทโดยตรง
วิธีนี้แม้ว่าจะดีกว่าที่พิจารณาในวรรค 3.14.7 แต่ก็มีราคาแพงกว่ามาก
การสตาร์ทมอเตอร์ด้วยเฟสโรเตอร์
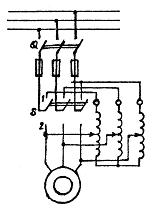
การสตาร์ทมอเตอร์ด้วยเฟสโรเตอร์ทำได้โดยการรวมลิโน่สตาร์ทไว้ในวงจรโรเตอร์ดังแสดงในรูปที่ 3.30 จุดเริ่มต้นของเฟสของขดลวดโรเตอร์เชื่อมต่อกับวงแหวนสลิปและผ่านแปรงเชื่อมต่อกับลิโน่สตาร์ทด้วยความต้านทาน รูเปียห์
![]() ความต้านทานของลิโน่สตาร์ทลดลงเป็นขดลวดสเตเตอร์ Rp
คำนวณเพื่อให้แรงบิดเริ่มต้นสูงสุดคือ เท่ากับวิกฤต ตั้งแต่เริ่มต้นสลิป ส ป= 1 แล้ว ส ป = 1 = s K, ความเท่าเทียมกัน M P \u003d M P สูงสุด \u003d M Kจะได้รับ แล้ว
ความต้านทานของลิโน่สตาร์ทลดลงเป็นขดลวดสเตเตอร์ Rp
คำนวณเพื่อให้แรงบิดเริ่มต้นสูงสุดคือ เท่ากับวิกฤต ตั้งแต่เริ่มต้นสลิป ส ป= 1 แล้ว ส ป = 1 = s K, ความเท่าเทียมกัน M P \u003d M P สูงสุด \u003d M Kจะได้รับ แล้ว  .
.
เครื่องยนต์สตาร์ทตามเส้นโค้งที่แสดงในรูปที่ 3.31 ในขณะที่สตาร์ทเครื่อง จุดทำงานบนลักษณะทางกลอยู่ในตำแหน่ง เอ
และเมื่อเครื่องเร่งความเร็วก็จะเคลื่อนที่ไปตามทางโค้ง 1
สอดคล้องกับลิโน่ที่เปิดใช้งานอย่างเต็มที่ ในช่วงเวลาที่สอดคล้องกับจุด อี, ขั้นตอนแรกของลิโน่เปิดอยู่และแรงบิดเพิ่มขึ้นอย่างกะทันหันที่จุด b - จุดทำงานของเครื่องยนต์ผ่านไปยังโค้ง 2; ในช่วงเวลาที่สอดคล้องกับจุด d ขั้นตอนที่สองของลิโน่ปิดอยู่จุดปฏิบัติการจะกระโดดไปยังจุด กับและเครื่องยนต์ไปที่ลักษณะธรรมชาติ 3 จากนั้นไปที่จุด f รีโอสแตตลัดวงจร ขดลวดโรเตอร์ลัดวงจร และแปรงจะหดกลับจากวงแหวน 
ดังนั้นเฟสโรเตอร์จึงทำให้สามารถสตาร์ทมอเตอร์แบบอะซิงโครนัสกำลังสูงได้ด้วยกระแสไฟสตาร์ทที่จำกัด อย่างไรก็ตาม วิธีการเริ่มต้นนี้เกี่ยวข้องกับการสูญเสียที่สำคัญในลิโน่สตาร์ท นอกจากนี้มอเตอร์โรเตอร์แบบพันรอบยังมีราคาแพงกว่ามอเตอร์แบบกรงกระรอกอีกด้วย ดังนั้นมอเตอร์สลิปริงจึงใช้เฉพาะกับความต้องการกำลังสูงและกำลังขับสูงเท่านั้น
เมื่ออุปกรณ์ กลไก หรืออุปกรณ์ใดๆ ถูกนำไปใช้งาน กระบวนการบางอย่างจะเกิดขึ้นในบางครั้ง ซึ่งเรียกว่าอุปกรณ์ที่ไม่อยู่กับที่หรือการเริ่มต้น ตัวอย่างที่รู้จักกันดีที่สุดในชีวิต - การเริ่มต้น พูด รถเข็นที่บรรทุกแล้ว รถไฟ ค่อนข้างแสดงให้เห็นชัดเจนว่าแรงผลักดันเริ่มต้นมักจะต้องการมากกว่าความพยายามในอนาคต
ปรากฏการณ์เดียวกันนี้เกิดขึ้นใน อุปกรณ์ไฟฟ้า: โคมไฟ มอเตอร์ไฟฟ้า แม่เหล็กไฟฟ้า ฯลฯ กระบวนการเริ่มต้นในอุปกรณ์เหล่านี้ขึ้นอยู่กับสถานะขององค์ประกอบการทำงาน: ไส้หลอด, สถานะของการทำให้เป็นแม่เหล็กของแกนกลางของขดลวดแม่เหล็กไฟฟ้า, ระดับของการแตกตัวเป็นไอออนของช่องว่างระหว่างอิเล็กโทรด ฯลฯ ตัวอย่างเช่น พิจารณาเส้นใยของหลอดไฟ เป็นที่ทราบกันดีว่าในสภาวะเย็นจะมีความต้านทานน้อยกว่าเมื่อเป็น
อุ่นได้ถึง 1,000 องศา ในโหมดการทำงาน ลองคำนวณแนวต้าน
ไส้หลอดสำหรับหลอดไฟขนาด 100 วัตต์จะมีค่าประมาณ 490 โอห์ม และวัดด้วยโอห์มมิเตอร์เมื่อไม่ใช้งาน ค่านี้จะน้อยกว่า 50 โอห์ม และตอนนี้สิ่งที่น่าสนใจที่สุดคือการคำนวณกระแสเริ่มต้น และคุณจะเข้าใจว่าทำไมหลอดไฟถึงเปิดอยู่เมื่อเปิดเครื่อง
ปรากฎว่าเมื่อเปิดเครื่องกระแสไฟถึง 4-5 A และนี่คือมากกว่า 1 กิโลวัตต์ เหตุใดจึงไม่เผาหลอดไฟ 100 วัตต์ "โดยไม่มีข้อยกเว้น" ใช่ เพียงเพราะเมื่อถูกความร้อน ไส้หลอดของหลอดไฟก็มี
ความต้านทานที่เพิ่มขึ้นซึ่งในสถานะคงตัวจะกลายเป็นค่าคงที่มากกว่าค่าเริ่มต้นและจำกัดกระแสการทำงานไว้ที่ประมาณ 0.5 A
มอเตอร์ไฟฟ้ามีการใช้งานที่กว้างที่สุดในด้านวิศวกรรม ดังนั้นความรู้เกี่ยวกับคุณลักษณะของคุณลักษณะการเริ่มต้นจึงมีความสำคัญอย่างยิ่งสำหรับ การทำงานที่ถูกต้องไดรฟ์ไฟฟ้า สลิปและแรงบิดบนเพลาเป็นพารามิเตอร์หลักที่ส่งผลต่อกระแสเริ่มต้น อันแรกเกี่ยวข้องกับความเร็วของการหมุนของสนามแม่เหล็กไฟฟ้ากับความถี่ของการหมุนของโรเตอร์และลดลงด้วยความเร็วจาก 1 เป็นค่าต่ำสุด และอันที่สองจะกำหนดภาระทางกลบนเพลา ค่าสูงสุดที่จุดเริ่มต้นของการเริ่มต้นและ เล็กน้อยหลังจากเร่งความเร็วเต็มที่ ในขณะที่สตาร์ทจะเทียบเท่ากับหม้อแปลงไฟฟ้าที่มีขดลวดทุติยภูมิสั้น เพราะเธอตัวเล็ก
ความต้านทานกระแสเริ่มต้นของมอเตอร์อย่างกะทันหันถึงค่าที่ระบุเกินสิบเท่า
การจ่ายกระแสไปยังขดลวดทำให้ความอิ่มตัวของแกนโรเตอร์เพิ่มขึ้นด้วยสนามแม่เหล็ก ลักษณะของแรงเคลื่อนไฟฟ้า การเหนี่ยวนำตนเองซึ่งนำไปสู่การเพิ่มขึ้นของอุปนัย
ความต้านทานของวงจร โรเตอร์เริ่มหมุนและค่าสัมประสิทธิ์การลื่นลดลง กล่าวคือ เครื่องยนต์กำลังเร่ง ในกรณีนี้ กระแสเริ่มต้นจะลดลงตามความต้านทานที่เพิ่มขึ้นเป็นค่าคงที่
ปัญหาที่เกิดจากกระแสน้ำไหลเข้าที่เพิ่มขึ้นเกิดขึ้น
เนื่องจากความร้อนสูงเกินไปของมอเตอร์ไฟฟ้า โอเวอร์โหลดของเครือข่ายไฟฟ้าในขณะนั้น
การเริ่มต้น, การเกิดขึ้นของแรงกระแทกทางกลในกลไกที่เชื่อมต่อเช่นกระปุกเกียร์ มีอุปกรณ์สองประเภทที่แก้ไขปัญหาเหล่านี้ใน เทคโนโลยีที่ทันสมัย- ซอฟต์สตาร์ทเตอร์และตัวแปลงความถี่
ทางเลือกของพวกเขาคืองานวิศวกรรมที่มีการวิเคราะห์การปฏิบัติงานจำนวนมาก
ลักษณะเฉพาะ. โหลดเข้า เงื่อนไขที่แท้จริงการใช้มอเตอร์ไฟฟ้าแบ่งออกเป็น 2 กลุ่ม คือ พัดลมแบบปั๊มและแบบอุตสาหกรรมทั่วไป ซอฟต์สตาร์ทเตอร์ส่วนใหญ่จะใช้สำหรับการโหลดกลุ่มพัดลม หน่วยงานกำกับดูแลดังกล่าวจำกัดกระแสเริ่มต้นไม่เกิน 2 ค่าเล็กน้อย แทนที่จะเป็น 5-10 ครั้งในระหว่างการสตาร์ทตามปกติโดยการเปลี่ยนแรงดันไฟฟ้าของขดลวด
มอเตอร์ไฟฟ้าใช้กันอย่างแพร่หลายในอุตสาหกรรม อย่างไรก็ตาม การออกแบบที่เรียบง่ายและต้นทุนต่ำมีข้อเสีย - เงื่อนไขที่ยากลำบากเริ่มต้นซึ่งอำนวยความสะดวกโดย ตัวแปลงความถี่. มีค่าอย่างยิ่งคือคุณสมบัติของความถี่
คอนเวอร์เตอร์เพื่อรักษากระแสไฟเข้าสำหรับ
นาน - หนึ่งนาทีหรือมากกว่านั้น ตัวอย่างที่ดีที่สุดของตัวแปลงที่ทันสมัยคือ อุปกรณ์อัจฉริยะดำเนินการไม่เพียง แต่ระเบียบของกระบวนการเริ่มต้น แต่ยังเพิ่มประสิทธิภาพของการสตาร์ทอัพตามเกณฑ์การดำเนินงานใด ๆ ที่กำหนด: ขนาดและความคงตัวของกระแสเริ่มต้น, สลิป, แรงบิดบนเพลา, ตัวประกอบกำลังที่เหมาะสม ฯลฯ .