ความถี่ของการหมุนของสนามสเตเตอร์ของมอเตอร์แบบอะซิงโครนัส วิธีควบคุมความเร็วของมอเตอร์เหนี่ยวนำ
เครื่องมือกลเกือบทั้งหมดมีมอเตอร์แบบอะซิงโครนัสเป็นไดรฟ์ไฟฟ้า พวกเขามี การออกแบบที่เรียบง่ายและไม่ ราคาสูง. ในเรื่องนี้การควบคุมความเร็วของมอเตอร์เหนี่ยวนำเป็นสิ่งสำคัญ อย่างไรก็ตาม ในรูปแบบการสลับมาตรฐาน สามารถควบคุมความเร็วได้โดยใช้ระบบส่งกำลังทางกล (กระปุกเกียร์ รอก) ซึ่งไม่สะดวกเสมอไป การควบคุมไฟฟ้าความเร็วของโรเตอร์มีข้อดีมากกว่า แม้ว่ามันจะทำให้การเชื่อมต่อของมอเตอร์เหนี่ยวนำซับซ้อนขึ้น
สำหรับอุปกรณ์อัตโนมัติบางหน่วย มันคือการควบคุมไฟฟ้าอย่างแม่นยำของความเร็วเพลาที่เหมาะสม มอเตอร์แบบอะซิงโครนัส. นี่เป็นวิธีเดียวที่จะปรับโหมดการทำงานได้อย่างราบรื่นและแม่นยำ มีหลายวิธีในการควบคุมความเร็วด้วยการปรับความถี่ แรงดันไฟ และรูปคลื่นของกระแส ทั้งหมดแสดงในแผนภาพ
จากวิธีการที่แสดงในรูป วิธีที่ใช้กันทั่วไปในการควบคุมความเร็วของโรเตอร์คือการเปลี่ยนพารามิเตอร์ต่อไปนี้:
- แรงดันไฟฟ้าที่ใช้กับสเตเตอร์
- ความต้านทานเสริมของวงจรโรเตอร์
- จำนวนคู่ขั้ว
- ปฏิบัติการความถี่ปัจจุบัน
สองวิธีสุดท้ายช่วยให้คุณสามารถเปลี่ยนความเร็วในการหมุนได้โดยไม่ลดประสิทธิภาพและการสูญเสียพลังงานลงอย่างเห็นได้ชัด วิธีการปรับแต่งที่เหลือส่งผลให้ประสิทธิภาพลดลงตามสัดส่วนของปริมาณสลิป แต่ทั้งสองมีข้อดีและข้อเสีย เนื่องจากมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอกมักถูกใช้ในการผลิต การอภิปรายเพิ่มเติมทั้งหมดจะเกี่ยวข้องกับมอเตอร์ไฟฟ้าประเภทนี้โดยเฉพาะ
 สำหรับ การควบคุมความถี่ส่วนใหญ่จะใช้ตัวแปลงเซมิคอนดักเตอร์ หลักการทำงานของพวกเขาขึ้นอยู่กับคุณสมบัติของการทำงานของมอเตอร์แบบอะซิงโครนัสซึ่งความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์ขึ้นอยู่กับความถี่ของแรงดันไฟฟ้า ความเร็วในการหมุนของสนามสเตเตอร์ถูกกำหนดโดยสูตรต่อไปนี้:
สำหรับ การควบคุมความถี่ส่วนใหญ่จะใช้ตัวแปลงเซมิคอนดักเตอร์ หลักการทำงานของพวกเขาขึ้นอยู่กับคุณสมบัติของการทำงานของมอเตอร์แบบอะซิงโครนัสซึ่งความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์ขึ้นอยู่กับความถี่ของแรงดันไฟฟ้า ความเร็วในการหมุนของสนามสเตเตอร์ถูกกำหนดโดยสูตรต่อไปนี้:
n1 = 60f/p โดยที่ n1 คือความถี่การหมุนของสนาม (rpm), f คือความถี่ไฟหลัก (Hz), p คือจำนวนคู่ขั้วของสเตเตอร์ 60 คือปัจจัยการแปลงมิติ
สำหรับ งานที่มีประสิทธิภาพมอเตอร์เหนี่ยวนำแบบไม่สูญเสียจำเป็นต้องเปลี่ยนแรงดันไฟฟ้าที่ใช้พร้อมกับความถี่ แรงดันไฟควรเปลี่ยนตามแรงบิดโหลด หากโหลดคงที่ แรงดันจะเปลี่ยนตามสัดส่วนของความถี่
ตัวควบคุมความถี่สมัยใหม่ช่วยให้คุณลดและเพิ่มความเร็วได้หลากหลาย สิ่งนี้ทำให้มั่นใจได้ถึงการใช้งานอย่างแพร่หลายในอุปกรณ์ที่มีการดึงแบบควบคุม เช่น ในเครื่องเชื่อมแบบตาข่ายหลายหน้าสัมผัส ในนั้นความเร็วในการหมุนของมอเตอร์แบบอะซิงโครนัสที่ขับเคลื่อนเพลาที่คดเคี้ยวนั้นถูกควบคุมโดยตัวแปลงเซมิคอนดักเตอร์ การปรับนี้ช่วยให้ผู้ปฏิบัติงานซึ่งตรวจสอบการดำเนินการทางเทคโนโลยีที่ถูกต้อง เร่งความเร็วหรือช้าลงในขั้นตอนเมื่อตั้งค่าเครื่อง
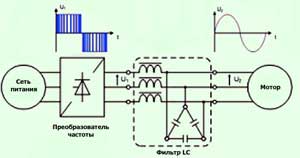
ให้เราอาศัยหลักการทำงานของเครื่องแปลงความถี่โดยละเอียด มันขึ้นอยู่กับหลักการของการแปลงสองครั้ง ตัวควบคุมประกอบด้วยวงจรเรียงกระแส อินเวอร์เตอร์พัลส์ และระบบควบคุม ในวงจรเรียงกระแส แรงดันไซน์จะถูกแปลงเป็น DC และป้อนเข้าอินเวอร์เตอร์ อินเวอร์เตอร์พัลส์สามเฟสกำลังไฟฟ้ามีสวิตช์ทรานซิสเตอร์หกตัว ผ่านปุ่มอัตโนมัติเหล่านี้ ความดันคงที่ถูกป้อนเข้าสู่ขดลวดสเตเตอร์ในลักษณะที่กระแสตรงหรือกระแสย้อนกลับจะไหลไปยังขดลวดที่สอดคล้องกันในเวลาที่เหมาะสมโดยมีการเลื่อนเฟส 120 ° ดังนั้นแรงดันไฟตรงจะเปลี่ยนเป็นแรงดันไฟฟ้าสามเฟสสลับกันของแอมพลิจูดและความถี่ที่ต้องการ
พารามิเตอร์ที่จำเป็นถูกตั้งค่าผ่านโมดูลควบคุม การปรับการทำงานของปุ่มโดยอัตโนมัตินั้นดำเนินการตามหลักการของการปรับความกว้างพัลส์ ทรานซิสเตอร์ IGBT อันทรงพลังใช้เป็นสวิตช์ไฟ พวกมันเมื่อเทียบกับไทริสเตอร์มีความถี่สวิตชิ่งสูงและผลิตกระแสไซน์เกือบโดยมีการบิดเบือนน้อยที่สุด แม้จะมีการใช้งานจริงของอุปกรณ์ดังกล่าว แต่ค่าใช้จ่ายสำหรับเครื่องยนต์ขนาดกลางและกำลังสูงยังคงสูงมาก
 การปรับความเร็วของการหมุนของมอเตอร์แบบอะซิงโครนัสโดยวิธีการ การเปลี่ยนแปลงจำนวนคู่ขั้วยังเป็นของวิธีการควบคุมทั่วไปสำหรับมอเตอร์กรงกระรอก มอเตอร์ดังกล่าวเรียกว่าหลายความเร็ว มีสองวิธีในการใช้วิธีนี้:
การปรับความเร็วของการหมุนของมอเตอร์แบบอะซิงโครนัสโดยวิธีการ การเปลี่ยนแปลงจำนวนคู่ขั้วยังเป็นของวิธีการควบคุมทั่วไปสำหรับมอเตอร์กรงกระรอก มอเตอร์ดังกล่าวเรียกว่าหลายความเร็ว มีสองวิธีในการใช้วิธีนี้:
- วางขดลวดหลาย ๆ อันพร้อมกันโดยมีเสาหลายคู่ในช่องสเตเตอร์ทั่วไป
- การใช้ขดลวดพิเศษที่มีความสามารถในการสลับขดลวดที่มีอยู่สำหรับจำนวนเสาคู่ที่ต้องการ
ในกรณีแรก ในการที่จะใส่ขดลวดเพิ่มเติมเข้าไปในร่อง จำเป็นต้องลดหน้าตัดของลวด ซึ่งจะทำให้กำลังไฟฟ้าของมอเตอร์ไฟฟ้าลดลง ในกรณีที่สอง อุปกรณ์สวิตชิ่งมีความซับซ้อนมากขึ้น โดยเฉพาะอย่างยิ่งสำหรับความเร็วสามระดับขึ้นไป และคุณลักษณะด้านพลังงานก็ลดลงเช่นกัน ในรายละเอียดเพิ่มเติม วิธีนี้และวิธีอื่นๆ ในการควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัสได้อธิบายไว้ในไฟล์เก็บถาวร ซึ่งสามารถดาวน์โหลดได้ที่ด้านล่างของหน้า
มักมาก มอเตอร์ความเร็วสูงผลิตขึ้นสำหรับความเร็วการหมุน 2, 3 หรือ 4 และมอเตอร์ 2 สปีดนั้นผลิตด้วยขดลวดหนึ่งเส้นบนสเตเตอร์และด้วยการเปลี่ยนจำนวนขั้วคู่ที่สัมพันธ์กับ 2: 1 = p2: pt, มอเตอร์ 3 สปีด - ด้วย ขดลวดสองเส้นบนสเตเตอร์ โดยอันหนึ่งทำด้วยการสลับ 2: 1 = Pr: Pi มอเตอร์ 4 สปีด - มีขดลวดสองอันบนสเตเตอร์ ซึ่งแต่ละอันจะทำโดยการสลับจำนวนคู่ขั้วในอัตราส่วน 2 : 1 มอเตอร์ไฟฟ้าหลายจังหวะมีเครื่องมือกล รถบรรทุก และ ลิฟต์โดยสารใช้สำหรับขับพัดลม ปั๊ม ฯลฯ
ข้อเสียที่สำคัญของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสคือการควบคุมความถี่การหมุนที่ค่อนข้างซับซ้อน
วิธีที่เป็นไปได้ในการควบคุมความเร็วในการหมุนของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามารถกำหนดได้โดยการวิเคราะห์นิพจน์ที่เขียนเทียบกับความเร็วในการหมุนของโรเตอร์มอเตอร์: น 2 = 60ฉ 1 (1 ‑ส)/พี. การวิเคราะห์สูตรแสดงให้เห็นว่าความเร็วในการหมุนของมอเตอร์เหนี่ยวนำสามารถเปลี่ยนแปลงได้โดยการเปลี่ยนสลิปของโรเตอร์ ส, จำนวนคู่ของเสา Rมอเตอร์หรือความถี่ ฉ 1 แรงดันไฟฟ้า
การควบคุมความเร็วโดยการเปลี่ยนสลิปทำได้โดยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์หรือโดยการเปลี่ยนความต้านทานแอคทีฟในวงจรโรเตอร์
ควบคุมความเร็วด้วยการเปลี่ยนการต้านทานแบบแอคทีฟเป็นไปได้เฉพาะสำหรับมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์เท่านั้นในขดลวดซึ่ง (โดยใช้วงแหวนสลิป) ความต้านทานการควบคุมเพิ่มเติมจะรวมอยู่ในลักษณะเดียวกับเมื่อสตาร์ทมอเตอร์ อย่างไรก็ตาม การต้านทานการสตาร์ทไม่เหมาะสำหรับการควบคุมความเร็ว เนื่องจากไม่ได้ออกแบบมาสำหรับการทำงานต่อเนื่อง ความต้านทานการปรับต้องทนต่อกระแสที่เทียบได้กับกระแสเริ่มต้นเป็นเวลานาน
ด้วยการเพิ่มความต้านทานเชิงแอคทีฟของวงจรโรเตอร์ ค่าของสลิปวิกฤตของโรเตอร์มอเตอร์ ส k ตามสูตรข้างต้นเพิ่มขึ้น
การรวมความต้านทานเพิ่มเติมต่างๆ เข้าด้วยกัน ทำให้สามารถรับลักษณะทางกลของเครื่องยนต์ได้ใกล้เคียงกับที่แสดงในรูปที่ 11 ตามมาด้วยความต้านทานเชิงแอคทีฟที่เพิ่มขึ้นในวงจรโรเตอร์ที่แรงบิดโหลดคงที่บนเพลามอเตอร์ จุดทำงานจะเปลี่ยนจากลักษณะทางกลหนึ่งไปเป็นอีกลักษณะหนึ่ง ซึ่งสอดคล้องกับความต้านทานใหม่ที่เพิ่มขึ้น มีการเพิ่มขึ้นในการลื่นของโรเตอร์และทำให้ความถี่ของการหมุนของโรเตอร์ของมอเตอร์แบบอะซิงโครนัสลดลง การควบคุมด้วยวิธีนี้เป็นไปได้ในสลิปที่หลากหลาย แต่ด้วยความถี่ที่ลดลง ความแข็งแกร่งของลักษณะทางกลจะถูกละเมิดและการสูญเสียทางไฟฟ้าเพิ่มขึ้น
ควบคุมความเร็วด้วยการเปลี่ยนแรงดันไฟอาจเป็นเพราะค่าวิกฤตของช่วงเวลานั้น เอ็มถึงและด้วยเหตุนี้ค่า เอ็ม(ส) ที่สลิปใด ๆ เป็นสัดส่วนกับกำลังสองของแรงดันไฟฟ้า ยู 12 . จากเส้นโค้งที่แสดงในรูปที่ 12 จะเห็นได้อย่างชัดเจนว่าด้วยแรงบิดโหลดคงที่บนเพลามอเตอร์ จุดทำงานจะเปลี่ยนจากลักษณะทางกลหนึ่งไปยังอีกลักษณะหนึ่ง ซึ่งสอดคล้องกับแรงดันไฟฟ้าใหม่ที่ลดลง ยูหนึ่ง . มีการเพิ่มขึ้นในการลื่นของโรเตอร์และทำให้ความถี่ของการหมุนของโรเตอร์ของมอเตอร์แบบอะซิงโครนัสลดลง การควบคุมมอเตอร์แบบอะซิงโครนัสด้วยวิธีนี้สามารถทำได้เฉพาะในช่วงสลิปขนาดเล็กเท่านั้น ซึ่งถูกจำกัดด้วยแรงบิดวิกฤตและสลิปของโรเตอร์
ควรสังเกตว่าเมื่อแรงดันไฟฟ้าลดลงแรงบิดที่สำคัญของเครื่องยนต์จะลดลงอย่างรวดเร็วตามสัดส่วนของกำลังสองของแรงดันไฟฟ้าและทำให้ความจุเกินพิกัดของเครื่องยนต์ลดลงอย่างรวดเร็วในแง่ของวิกฤต อัตราส่วนโมเมนต์ซึ่งจำกัดขอบเขตของวิธีการที่อธิบายไว้
การควบคุมขั้นตอนของความเร็วในการหมุนของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอกตามที่ระบุนั้นทำได้โดย การเปลี่ยนแปลงจำนวนคู่ขั้วโดยการเปลี่ยนส่วนของขดลวดซึ่งใช้สำหรับมอเตอร์หลายความเร็ว สาระสำคัญของวิธีการนี้อยู่ที่ความถี่คงที่ของแรงดันไฟฟ้า ความเร็วในการหมุนของมอเตอร์แบบอะซิงโครนัสขึ้นอยู่กับจำนวนคู่ของขั้วขดลวดสเตเตอร์ ดังนั้นหากขดลวดสองเส้นหรือมากกว่าแยกกันที่มีจำนวนคู่ขั้วต่างกันวางอยู่บนสเตเตอร์ของมอเตอร์เหนี่ยวนำ เมื่อขดลวดแต่ละเส้นเชื่อมต่อกับเครือข่ายแยกกัน สามารถรับความถี่การหมุนที่แตกต่างกันของสนามแม่เหล็กได้ และด้วยเหตุนี้โรเตอร์ น่าเสียดายที่วิธีการที่ประหยัดและค่อนข้างง่ายนี้ไม่อนุญาตให้ควบคุมความเร็วของเครื่องยนต์ได้อย่างราบรื่น อุตสาหกรรมนี้เชี่ยวชาญในการผลิตชุดมอเตอร์ไฟฟ้า ซึ่งความเร็วในการหมุนจะถูกควบคุมโดยขั้นตอนที่ 2, 3 และ 4 เท่าโดยไม่สูญเสียพลังงาน ควรสังเกตด้วยว่าการออกแบบมอเตอร์ไฟฟ้าแบบหลายความเร็วนั้นซับซ้อนกว่าแบบความเร็วเดียวซึ่งทำให้ราคาสูงขึ้น
สามารถปรับความเร็วของมอเตอร์แบบอะซิงโครนัสได้ การเปลี่ยนความถี่ของกระแสไฟจ่ายแต่ทางนี้เพื่อ เครื่องยนต์ทรงพลังแทบไม่ได้ใช้เนื่องจากขาดอุปกรณ์ที่ง่ายและประหยัดซึ่งควบคุมความถี่ของกระแสในวงจรอันทรงพลัง ในเวลาเดียวกัน การพัฒนาและการพัฒนาอุตสาหกรรมของอุปกรณ์เซมิคอนดักเตอร์ที่ควบคุมราคาถูกและทรงพลัง (ไดโอด ไทริสเตอร์) ทำให้สามารถใช้ตัวแปลงความถี่และแรงดันไฟฟ้าที่ง่ายและเชื่อถือได้ของกำลังต่ำและปานกลาง ซึ่งคุณสามารถปรับความเร็วในการหมุนของ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอก ซึ่งทำให้การขับเคลื่อนกลไกต่างๆ ง่ายขึ้นอย่างมาก ในขณะที่มักไม่จำเป็นต้องใช้กระปุกเกียร์ กระปุกเกียร์ ระบบส่งกำลัง
หน้า 17 จาก 51
มอเตอร์แบบอะซิงโครนัสเป็นพื้นฐานของไดรฟ์ไฟฟ้าที่ทันสมัย กระแสสลับ. ประสิทธิภาพของไดรฟ์ไฟฟ้านี้พิจารณาจากความเป็นไปได้ของการควบคุมความเร็วเป็นส่วนใหญ่
ความสามารถ มอเตอร์เหนี่ยวนำเกี่ยวกับการควบคุมความเร็วของโรเตอร์ถูกกำหนดโดยนิพจน์
.
จากนิพจน์นี้สามารถปรับความเร็วในการหมุนได้สามวิธี: โดยการเปลี่ยนความถี่จำนวนขั้วคู่ พีและลื่น ส. ลองพิจารณาแต่ละวิธีเหล่านี้โดยละเอียด
วิธีนี้เป็นวิธีที่มีแนวโน้มมากที่สุดในปัจจุบัน การเปลี่ยนแปลงความถี่ดำเนินการโดยใช้เครื่องแปลงความถี่เซมิคอนดักเตอร์ (รูปที่ 4.28 เอ). พร้อมกับการเปลี่ยนแปลงความถี่ แรงดันไฟฟ้ายังถูกควบคุมเพื่อให้แน่ใจว่าฟลักซ์แม่เหล็กคงที่ จากนิพจน์ที่เกี่ยวข้องกับแรงดันถึงการไหล เอฟ
,
ตามมาด้วยว่าต้องปรับแรงดันไฟฟ้าตามสัดส่วนของความถี่
![]() .
.
การเบี่ยงเบนจากกฎหมายนี้นำไปสู่การเปลี่ยนแปลงในกระแส Fซึ่งไม่เป็นที่พึงปรารถนา ด้วยฟลักซ์ที่เพิ่มขึ้น ความอิ่มตัวของวงจรแม่เหล็กเพิ่มขึ้น การสูญเสียในเหล็กและกระแสแม่เหล็กเพิ่มขึ้น การลดการไหลทำให้แรงบิดสูงสุดของเครื่องยนต์ลดลงและปรากฏการณ์ที่ไม่พึงปรารถนาอื่นๆ อีกหลายประการ
ที่ ![]() ลักษณะทางกลของเครื่องยนต์แสดงในรูปที่ 4.28, ขดู. ด้วยความถี่ที่ลดลงแรงบิดเริ่มต้นของมอเตอร์จะเพิ่มขึ้นและค่าสูงสุดจะลดลงเล็กน้อย สลิปการทำงานของเครื่องยนต์ยังคงมีขนาดเล็กซึ่งแสดงถึงโหมดประหยัดของการทำงานของเครื่องยนต์ อย่างไรก็ตาม ต้นทุนของวิธีการควบคุมความเร็วของมอเตอร์นี้สูงมาก เนื่องจากต้องทำตัวแปลงความถี่ พลังงานเต็มเครื่องยนต์.
ลักษณะทางกลของเครื่องยนต์แสดงในรูปที่ 4.28, ขดู. ด้วยความถี่ที่ลดลงแรงบิดเริ่มต้นของมอเตอร์จะเพิ่มขึ้นและค่าสูงสุดจะลดลงเล็กน้อย สลิปการทำงานของเครื่องยนต์ยังคงมีขนาดเล็กซึ่งแสดงถึงโหมดประหยัดของการทำงานของเครื่องยนต์ อย่างไรก็ตาม ต้นทุนของวิธีการควบคุมความเร็วของมอเตอร์นี้สูงมาก เนื่องจากต้องทำตัวแปลงความถี่ พลังงานเต็มเครื่องยนต์.
วิธีการควบคุมนี้แตกต่างจากวิธีก่อนหน้า อนุญาตให้เปลี่ยนความเร็วเป็นขั้นตอนเท่านั้น ใช้ในกลไกต่างๆ เช่น เครื่องเป่าลม สายพานลำเลียง รอก ลิฟต์ มอเตอร์สวิตชิ่งขั้วคู่เรียกว่า หลายความเร็ว. โดยปกติมอเตอร์แบบอะซิงโครนัสแบบหลายความเร็วจะสร้างด้วยระดับความเร็วสอง สามและสี่ระดับ มอเตอร์สองจังหวะผลิตขึ้นด้วยขดลวดเดียวหากจำนวนคู่ขั้วตรงกับอัตราส่วนต่อไปนี้:
.
มอเตอร์สามและสี่ความเร็วมีให้เลือกสองขดลวด ในมอเตอร์แบบสามสปีด ขดลวดทั้งสองแบบจะทำขึ้นแบบสองสปีดในมอเตอร์แบบสี่สปีดเท่านั้น การหมุนของโรเตอร์ของมอเตอร์หลายความเร็วนั้นลัดวงจร ไม่จำเป็นต้องเปลี่ยนไดอะแกรมการเดินสายตั้งแต่ จำนวนที่ต้องการคู่ของเสาของขดลวดโรเตอร์จะเกิดขึ้นโดยอัตโนมัติโดยสนามสเตเตอร์
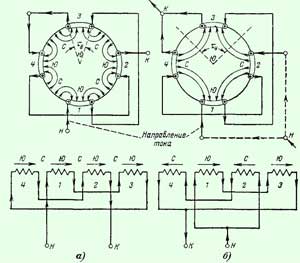
การเปลี่ยนจำนวนเสาทำได้โดยการเปลี่ยนรูปแบบการเชื่อมต่อของส่วนขดลวดสเตเตอร์ ในรูป 4.29 แสดงสามตัวเลือกสำหรับการเชื่อมต่อส่วนต่างๆ
ตัวเลือก "a" สอดคล้องกับการรวมพยัญชนะตามลำดับของส่วนต่างๆ ในกรณีนี้จะเกิดสนามแม่เหล็กที่มีขั้ว ในตัวเลือก "b" ส่วนที่สองจะเปิดขึ้นตามลำดับ ฟิลด์ผลลัพธ์มีเสา พลังงานคดเคี้ยวยังคงไม่เปลี่ยนแปลง ![]() และโมเมนต์ที่เครื่องยนต์พัฒนาขึ้นก็ลดลงครึ่งหนึ่ง
และโมเมนต์ที่เครื่องยนต์พัฒนาขึ้นก็ลดลงครึ่งหนึ่ง ![]() . ในตัวแปร "c" ส่วนที่สองจะเปิดขึ้นในการป้องกันแบบขนาน สนามที่ได้ก็จะมีขั้วด้วย แต่กำลังคดเคี้ยว
. ในตัวแปร "c" ส่วนที่สองจะเปิดขึ้นในการป้องกันแบบขนาน สนามที่ได้ก็จะมีขั้วด้วย แต่กำลังคดเคี้ยว ![]() เพิ่มเป็นสองเท่าและแรงบิดของมอเตอร์คงที่
เพิ่มเป็นสองเท่าและแรงบิดของมอเตอร์คงที่ ![]() .
.
 |
ดังนั้น ในการเปลี่ยนจำนวนคู่ขั้วที่สัมพันธ์กัน จึงจำเป็นที่แต่ละเฟสของขดลวดประกอบด้วยสองส่วนที่เหมือนกัน เมื่อกระแสทั้งสองส่วนไหลไปรอบ ๆ โดยกระแสในทิศทางเดียวกัน จำนวนขั้ว เมื่อทิศทางของกระแสในส่วนใดขั้วหนึ่งเปลี่ยนไป จำนวนขั้วจะลดลงครึ่งหนึ่ง เมื่อเปลี่ยนจำนวนขั้วจากการแบ่งขั้ว จะลดลงครึ่งหนึ่ง ในขณะที่ขนาดของโซนเฟสของขดลวดสามเฟสเปลี่ยนจาก 60 °เป็น 120 ° (รูปที่ 4.30)
เนื่องจากลำดับเฟสสำหรับความเร็วทั้งสองจะต้องเหมือนเดิม นอกเหนือจากการเปลี่ยนทิศทางของกระแสในโซนแล้ว ยังจำเป็นต้องสลับสองเฟสของขดลวดด้วย ด้วยจำนวนเสาที่มากขึ้น การม้วนจะดำเนินการด้วยขั้นไดอะเมตริก จากนั้นสำหรับเสาจำนวนน้อย
ขั้นตอนเล็ก ๆ นำไปสู่การเสื่อมสภาพในการใช้ขดลวดและทำให้ประสิทธิภาพทางเทคนิคและเศรษฐกิจของเครื่องยนต์ลดลง
มอเตอร์หลายความเร็วได้รับการออกแบบมาสำหรับโหมดการทำงานต่างๆ โหมดที่พบบ่อยที่สุดคือแรงบิดคงที่และกำลังคงที่ มีการควบคุมความเร็วด้วยแรงบิดคงที่เมื่อเปลี่ยนขดลวดจากดาวเป็นวงจรดาวคู่ (รูปที่ 4.31)
ด้วยสวิตช์ดังกล่าว กระแสไฟที่ใช้จากเครือข่ายจะเพิ่มขึ้นเป็นสองเท่า และด้วยเหตุนี้ กำลังของมอเตอร์ในขณะที่โมเมนต์ไม่เปลี่ยนแปลง
คุณสามารถเปลี่ยนสลิปของมอเตอร์แบบอะซิงโครนัสได้ วิธีทางที่แตกต่าง: โดยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับสเตเตอร์ การแนะนำความต้านทานเข้าไปในวงจรโรเตอร์ หรือแนะนำ EMF เพิ่มเติมในวงจรโรเตอร์
เมื่อแรงดันสเตเตอร์เปลี่ยนแปลง ลักษณะทางกลของมอเตอร์จะเปลี่ยนไป ดังแสดงในรูปที่ 4.33. การลดแรงดันไฟฟ้าทำให้ความแข็งแกร่งของลักษณะทางกลลดลงและสลิปเพิ่มขึ้น ในกรณีนี้ ความเร็วในการหมุนของโรเตอร์จะลดลง
.
การควบคุมความเร็วด้วยวิธีนี้เป็นไปได้ในการเปลี่ยนสลิปที่ จำกัด
.
ข้อเสียเปรียบหลักของวิธีการควบคุมความเร็วนี้คือประสิทธิภาพต่ำเนื่องจากการสูญเสียที่เพิ่มขึ้นในการหมุนของโรเตอร์ตามสัดส่วนของความถี่สลิป
.
 |
ดังนั้นจึงใช้สำหรับมอเตอร์กำลังต่ำที่ทำงานในระบบควบคุมอัตโนมัติเท่านั้น
ในมอเตอร์ที่มีเฟสโรเตอร์ ความเร็วในการหมุนสามารถเปลี่ยนแปลงได้โดยการเปลี่ยนความต้านทานในโรเตอร์ (รูปที่ 4.34)
ความได้เปรียบ วิธีนี้การควบคุมความถี่ก็คือ ช่วงเวลาสูงสุดยังคงไม่เปลี่ยนแปลง สิ่งสำคัญคือต้องสังเกตว่าส่วนหนึ่งของการสูญเสียมอเตอร์จะถูกถ่ายโอนไปยังตัวต้านทาน ซึ่งจะช่วยอำนวยความสะดวกในระบบการระบายความร้อนของมอเตอร์ มิฉะนั้น วิธีการนี้จะคล้ายกับวิธีก่อนหน้าและมีลักษณะเฉพาะด้วยประสิทธิภาพต่ำ ช่วงการควบคุมขนาดเล็กขึ้นอยู่กับโหลด และลักษณะทางกลที่ "นุ่มนวล"
เพื่อเพิ่มพลัง ประสิทธิภาพของเครื่องยนต์เมื่อปรับความเร็วด้วยการเปลี่ยนสลิปจำเป็นต้องใช้แรงสลิปให้ครบ งานที่มีประโยชน์หรือกลับสู่เครือข่าย แบบแผนที่ใช้ความคิดนี้เรียกว่า เรียงซ้อน. หนึ่งในแผนงานที่พบบ่อยที่สุด ประเภทนี้เป็นไดอะแกรมของน้ำตกแบบอะซิงโครนัสวาล์ว (รูปที่ 4.35)
วงจรประกอบด้วยมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์ (AD) วงจรเรียงกระแสไดโอด (D) โช้คปรับให้เรียบ (Dr) อินเวอร์เตอร์ไทริสเตอร์ (I) และหม้อแปลงจับคู่เครือข่าย (Tr) การควบคุมความเร็วทำได้โดยการเปลี่ยนแรงดันไฟฟ้าของอินเวอร์เตอร์ สิ่งนี้นำไปสู่การเปลี่ยนแปลงที่สอดคล้องกันในแรงดันไฟฟ้าของขดลวดโรเตอร์และด้วยเหตุนี้ความเร็วของโรเตอร์ พลังงานความถี่สลิปที่ดึงออกมาจากขดลวดโรเตอร์ของมอเตอร์จะถูกโอนไปยังเครือข่ายผ่านหม้อแปลงที่เข้าชุดกัน
ข้อดีของวงจรควบคุมความเร็วคาสเคดสำหรับมอเตอร์แบบอะซิงโครนัสเมื่อเปรียบเทียบกับวงจรควบคุมความถี่ในวงจรสเตเตอร์ (รูปที่ 4.28) คือตัวแปลงเซมิคอนดักเตอร์ทำงานด้วยกำลังสลิป ไม่ใช่ที่กำลังมอเตอร์เต็ม กรณีนี้มีความสำคัญเป็นพิเศษสำหรับการขับเคลื่อนปั๊ม เครื่องอัด สายพานลำเลียง กลไกการยกฯลฯ เมื่อจำเป็นต้องมีการควบคุมความเร็วในช่วงที่จำกัด (2:1 หรือน้อยกว่า)
น้ำตกแบบอะซิงโครนัสวาล์วที่มีวงจรเรียงกระแสที่ไม่สามารถควบคุมได้ช่วยให้ควบคุมลงจากความเร็วซิงโครนัสเท่านั้น หากคุณใช้วงจรเรียงกระแสแบบควบคุม คุณจะสามารถควบคุมความเร็วจากซิงโครนัสได้ ในกรณีนี้ทิศทางของการส่งกำลังแบบเลื่อนจะกลับด้าน
ข้อเสียที่สำคัญของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสคือการควบคุมความถี่การหมุนที่ค่อนข้างซับซ้อน
วิธีที่เป็นไปได้ในการควบคุมความเร็วในการหมุนของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามารถกำหนดได้โดยการวิเคราะห์นิพจน์ที่เขียนเทียบกับความเร็วในการหมุนของโรเตอร์มอเตอร์: น 2 = 60ฉ 1 (1 ‑ส)/พี. การวิเคราะห์สูตรแสดงให้เห็นว่าความเร็วในการหมุนของมอเตอร์เหนี่ยวนำสามารถเปลี่ยนแปลงได้โดยการเปลี่ยนสลิปของโรเตอร์ ส, จำนวนคู่ของเสา Rมอเตอร์หรือความถี่ ฉ 1 แรงดันไฟฟ้า
การควบคุมความเร็วโดยการเปลี่ยนสลิปทำได้โดยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์หรือโดยการเปลี่ยนความต้านทานแอคทีฟในวงจรโรเตอร์
ควบคุมความเร็วด้วยการเปลี่ยนการต้านทานแบบแอคทีฟเป็นไปได้เฉพาะสำหรับมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์เท่านั้นในขดลวดซึ่ง (โดยใช้วงแหวนสลิป) ความต้านทานการควบคุมเพิ่มเติมจะรวมอยู่ในลักษณะเดียวกับเมื่อสตาร์ทมอเตอร์ อย่างไรก็ตาม การต้านทานการสตาร์ทไม่เหมาะสำหรับการควบคุมความเร็ว เนื่องจากไม่ได้ออกแบบมาสำหรับการทำงานต่อเนื่อง ความต้านทานการปรับต้องทนต่อกระแสที่เทียบได้กับกระแสเริ่มต้นเป็นเวลานาน
ด้วยการเพิ่มความต้านทานเชิงแอคทีฟของวงจรโรเตอร์ ค่าของสลิปวิกฤตของโรเตอร์มอเตอร์ ส k ตามสูตรข้างต้นเพิ่มขึ้น
การรวมความต้านทานเพิ่มเติมต่างๆ เข้าด้วยกัน ทำให้สามารถรับลักษณะทางกลของเครื่องยนต์ได้ใกล้เคียงกับที่แสดงในรูปที่ 11 ตามมาด้วยความต้านทานเชิงแอคทีฟที่เพิ่มขึ้นในวงจรโรเตอร์ที่แรงบิดโหลดคงที่บนเพลามอเตอร์ จุดทำงานจะเปลี่ยนจากลักษณะทางกลหนึ่งไปเป็นอีกลักษณะหนึ่ง ซึ่งสอดคล้องกับความต้านทานใหม่ที่เพิ่มขึ้น มีการเพิ่มขึ้นในการลื่นของโรเตอร์และทำให้ความถี่ของการหมุนของโรเตอร์ของมอเตอร์แบบอะซิงโครนัสลดลง การควบคุมด้วยวิธีนี้เป็นไปได้ในสลิปที่หลากหลาย แต่ด้วยความถี่ที่ลดลง ความแข็งแกร่งของลักษณะทางกลจะถูกละเมิดและการสูญเสียทางไฟฟ้าเพิ่มขึ้น
ควบคุมความเร็วด้วยการเปลี่ยนแรงดันไฟอาจเป็นเพราะค่าวิกฤตของช่วงเวลานั้น เอ็มถึงและด้วยเหตุนี้ค่า เอ็ม(ส) ที่สลิปใด ๆ เป็นสัดส่วนกับกำลังสองของแรงดันไฟฟ้า ยู 12 . จากเส้นโค้งที่แสดงในรูปที่ 12 จะเห็นได้อย่างชัดเจนว่าด้วยแรงบิดโหลดคงที่บนเพลามอเตอร์ จุดทำงานจะเปลี่ยนจากลักษณะทางกลหนึ่งไปยังอีกลักษณะหนึ่ง ซึ่งสอดคล้องกับแรงดันไฟฟ้าใหม่ที่ลดลง ยูหนึ่ง . มีการเพิ่มขึ้นในการลื่นของโรเตอร์และทำให้ความถี่ของการหมุนของโรเตอร์ของมอเตอร์แบบอะซิงโครนัสลดลง การควบคุมมอเตอร์แบบอะซิงโครนัสด้วยวิธีนี้สามารถทำได้เฉพาะในช่วงสลิปขนาดเล็กเท่านั้น ซึ่งถูกจำกัดด้วยแรงบิดวิกฤตและสลิปของโรเตอร์
ควรสังเกตว่าเมื่อแรงดันไฟฟ้าลดลงแรงบิดที่สำคัญของเครื่องยนต์จะลดลงอย่างรวดเร็วตามสัดส่วนของกำลังสองของแรงดันไฟฟ้าและทำให้ความจุเกินพิกัดของเครื่องยนต์ลดลงอย่างรวดเร็วในแง่ของวิกฤต อัตราส่วนโมเมนต์ซึ่งจำกัดขอบเขตของวิธีการที่อธิบายไว้
การควบคุมขั้นตอนของความเร็วในการหมุนของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอกตามที่ระบุนั้นทำได้โดย การเปลี่ยนแปลงจำนวนคู่ขั้วโดยการเปลี่ยนส่วนของขดลวดซึ่งใช้สำหรับมอเตอร์หลายความเร็ว สาระสำคัญของวิธีการนี้อยู่ที่ความถี่คงที่ของแรงดันไฟฟ้า ความเร็วในการหมุนของมอเตอร์แบบอะซิงโครนัสขึ้นอยู่กับจำนวนคู่ของขั้วขดลวดสเตเตอร์ ดังนั้นหากขดลวดสองเส้นหรือมากกว่าแยกกันที่มีจำนวนคู่ขั้วต่างกันวางอยู่บนสเตเตอร์ของมอเตอร์เหนี่ยวนำ เมื่อขดลวดแต่ละเส้นเชื่อมต่อกับเครือข่ายแยกกัน สามารถรับความถี่การหมุนที่แตกต่างกันของสนามแม่เหล็กได้ และด้วยเหตุนี้โรเตอร์ น่าเสียดายที่วิธีการที่ประหยัดและค่อนข้างง่ายนี้ไม่อนุญาตให้ควบคุมความเร็วของเครื่องยนต์ได้อย่างราบรื่น อุตสาหกรรมนี้เชี่ยวชาญในการผลิตชุดมอเตอร์ไฟฟ้า ซึ่งความเร็วในการหมุนจะถูกควบคุมโดยขั้นตอนที่ 2, 3 และ 4 เท่าโดยไม่สูญเสียพลังงาน ควรสังเกตด้วยว่าการออกแบบมอเตอร์ไฟฟ้าแบบหลายความเร็วนั้นซับซ้อนกว่าแบบความเร็วเดียวซึ่งทำให้ราคาสูงขึ้น
สามารถปรับความเร็วของมอเตอร์แบบอะซิงโครนัสได้ การเปลี่ยนความถี่ของกระแสไฟจ่ายแต่วิธีนี้ใช้ไม่ได้จริงกับมอเตอร์ทรงพลังเนื่องจากขาดอุปกรณ์ที่ง่ายและประหยัดซึ่งควบคุมความถี่ของกระแสในวงจรอันทรงพลัง ในเวลาเดียวกัน การพัฒนาและการพัฒนาอุตสาหกรรมของอุปกรณ์เซมิคอนดักเตอร์ที่ควบคุมราคาถูกและทรงพลัง (ไดโอด ไทริสเตอร์) ทำให้สามารถใช้ตัวแปลงความถี่และแรงดันไฟฟ้าที่ง่ายและเชื่อถือได้ของกำลังต่ำและปานกลาง ซึ่งคุณสามารถปรับความเร็วในการหมุนของ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอก ซึ่งทำให้การขับเคลื่อนกลไกต่างๆ ง่ายขึ้นอย่างมาก ในขณะที่มักไม่จำเป็นต้องใช้กระปุกเกียร์ กระปุกเกียร์ ระบบส่งกำลัง




