วิธีการคำนวณกระแสเริ่มต้น กระแสเริ่มต้นของมอเตอร์ปั๊มหลุมเจาะ
เมื่อสตาร์ท เช่น เมื่อสตาร์ทและเร่งความเร็ว แรงบิดที่มอเตอร์พัฒนาขึ้นจะต้องเกินโมเมนต์ความต้านทานของโหลด มิฉะนั้น มอเตอร์จะไม่สามารถเร่งความเร็วได้ ในช่วงเวลาเริ่มต้นของการเริ่มต้น เมื่อความเร็วมอเตอร์เป็นศูนย์ และสลิปเป็นหนึ่ง EMF ในการหมุนของโรเตอร์จะสูงสุด (ดู 2.37) และกระแสเริ่มต้นในขดลวดสเตเตอร์ I 2 ตาม (2.40) , เกินพิกัดปัจจุบันอย่างมีนัยสำคัญ ดังนั้นกระแสในขดลวดสเตเตอร์ก็เพิ่มขึ้นเช่นกันนั่นคือกระแสที่มอเตอร์ใช้จากเครือข่ายอุปทาน หลายหลากของกระแสเริ่มต้น y p \u003d I P / I NOM สำหรับมอเตอร์ที่มีโรเตอร์กรงกระรอกถึง 5 - 7 ขณะที่มอเตอร์เร่งความเร็ว สลิปจะลดลง ซึ่งทำให้ EMF ลดลงและกำลังกระแสในขดลวดของโรเตอร์ ดังนั้นกระแสในขดลวดสเตเตอร์ก็ลดลงเช่นกัน
กระแสไฟเริ่มต้นขนาดใหญ่อาจไม่เป็นที่ยอมรับ ทั้งสำหรับตัวมอเตอร์เองและสำหรับเครือข่ายที่จ่ายมอเตอร์ หากมีการสตาร์ทบ่อยครั้ง กระแสไฟเริ่มต้นขนาดใหญ่จะทำให้อุณหภูมิของขดลวดมอเตอร์สูงขึ้น ซึ่งอาจนำไปสู่ แก่ก่อนวัยการแยกตัวของมัน หากหลังจากใช้แรงดันไฟฟ้ากับเครื่องยนต์แล้วสตาร์ทไม่ติดด้วยสาเหตุใด ๆ ให้ดับเครื่องยนต์ทันที อุปกรณ์อัตโนมัติการป้องกันกระแสเกินหรือด้วยตนเอง ในเครือข่ายอุปทานที่มีความแรงกระแสสูง แรงดันไฟฟ้าจะลดลง ซึ่งส่งผลต่อการทำงานของผู้บริโภครายอื่นที่เชื่อมต่อกับเครือข่าย ดังนั้นการสตาร์ทมอเตอร์โดยตรงโดยการเชื่อมต่อโดยตรงกับแหล่งจ่ายไฟหลักจะได้รับอนุญาตก็ต่อเมื่อกำลังของมอเตอร์น้อยกว่ากำลังที่ออกแบบแหล่งจ่ายไฟไว้มากเท่านั้น
สำหรับมอเตอร์ที่มีเฟสโรเตอร์ การลดกระแสไฟเริ่มต้นทำได้โดยการรวมรีโอสแตตสตาร์ทแบบสามเฟสในวงจรโรเตอร์ ความต้านทานแบบแอคทีฟที่รวมอยู่ในวงจรของแต่ละเฟสของโรเตอร์ทำให้กระแสในโรเตอร์โรเตอร์ลดลง และด้วยเหตุนี้ในขดลวดสเตเตอร์ ในเวลาเดียวกัน การเพิ่มขึ้นของความต้านทานเชิงแอ็คทีฟในวงจรโรเตอร์ทำให้ตัวประกอบกำลังเพิ่มขึ้น cosψ 2 และได้รับแรงบิดเริ่มต้นที่มากพอกับกระแสเริ่มต้นที่ลดลง เมื่อความเร็วของเครื่องยนต์เพิ่มขึ้น ความต้านทานของรีโอสแตตสตาร์ทจะค่อยๆ หรือลดลงทีละขั้นจนเป็นศูนย์
ลดกระแสเริ่มต้น มอเตอร์เหนี่ยวนำด้วยโรเตอร์กรงกระรอกสามารถทำได้โดยเริ่มจากแรงดันไฟฟ้าที่ลดลง นอกจากนี้ยังสามารถเปิดเครื่องในช่วงเวลาที่สตาร์ทตามรูปแบบดาวได้ ขดลวดสเตเตอร์ที่ออกแบบมาสำหรับการเชื่อมต่อเดลต้า อย่างไรก็ตาม วิธีการเหล่านี้ลดแรงบิดลงอย่างมาก และใช้ได้กับการสตาร์ทแบบไม่มีโหลดหรือโหลดเบาเท่านั้น ลดกระแสสตาร์ทในขณะที่ยังคงแรงบิดสูงโดยเริ่มต้นที่ความถี่แรงดันไฟจ่ายที่ลดลง
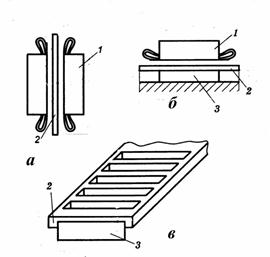
สำหรับกลไกที่มี เงื่อนไขที่ยากลำบากการสตาร์ท ซึ่งควรใช้มอเตอร์แบบอะซิงโครนัสกับโรเตอร์กรงกระรอก แนะนำให้ใช้มอเตอร์ที่มีคุณสมบัติในการสตาร์ทที่ปรับปรุงแล้ว: ด้วยแรงบิดเริ่มต้นขนาดใหญ่และน้อยกว่ามอเตอร์ วัตถุประสงค์ทั่วไป, กระแสไฟเริ่มต้น เหล่านี้เป็นเครื่องยนต์ที่มีโรเตอร์สองเซลล์และโรเตอร์ร่องลึก รูปร่างของร่องและตัวนำที่ใช้งานของขดลวดเกราะของโรเตอร์สองเซลล์และร่องลึกแสดงในรูปที่ 2.30 น
โรเตอร์ของมอเตอร์สองเซลล์มีขดลวดลัดวงจรสองอัน: ภายนอก 1 (รูปที่ 2.30a.) หรือสตาร์ททำด้วยแท่งที่มีหน้าตัดเล็ก ๆ ของวัสดุที่มีค่าการนำไฟฟ้าต่ำ (ทองเหลือง, ทองแดง) และภายใน 2 หรือการทำงาน - ทำด้วยแท่งที่มีหน้าตัดขนาดใหญ่จากวัสดุที่มีค่าการนำไฟฟ้าสูง (ทองแดง) ที่จุดเริ่มต้นของมอเตอร์สตาร์ท (ที่ n = 0, s = 1) ความถี่ของกระแสในโรเตอร์จะเท่ากับความถี่ของเครือข่าย ในกรณีนี้ ค่าความต้านทานแบบเหนี่ยวนำของเซลล์จะมีขนาดใหญ่เมื่อเทียบกับเซลล์แบบแอคทีฟ (X L = 2πfL) ความต้านทานอุปนัยของส่วนล่าง การทำงาน กรง ฝังลึกในร่างกายของโรเตอร์และควบคู่กับฟลักซ์การรั่วขนาดใหญ่ สูงเป็นพิเศษ (แสดงโดยเส้นประในรูปที่ 2.30) กระแสไหลผ่านส่วนใหญ่ผ่านกรงส่วนบนที่มีความต้านทานแบบแอคทีฟมากเนื่องจากกระแสเริ่มต้นลดลงและแรงบิดเริ่มต้นเพิ่มขึ้น ขณะที่เครื่องยนต์เร่งความเร็ว ความถี่กระแสของโรเตอร์จะลดลงสิบเท่า เนื่องจากสลิปลดลงจากหนึ่งถึงหนึ่งในร้อย ดังนั้นความต้านทานอุปนัยของโรเตอร์ตามสัดส่วนกับความถี่ลดลงและไม่มีนัยสำคัญสำหรับทั้งขดลวดสตาร์ทและขดลวดทำงาน ในกรณีนี้ กระแสของโรเตอร์ซึ่งกระจายระหว่างเซลล์ในสัดส่วนผกผันกับความต้านทาน เริ่มไหลส่วนใหญ่ในขดลวดทำงานที่มีความต้านทานแอคทีฟต่ำ ดังนั้น กระบวนการสตาร์ทเครื่องยนต์สองเซลล์จึงคล้ายกับกระบวนการสตาร์ทเครื่องยนต์แบบรีโอสแตติกที่มีเฟสโรเตอร์
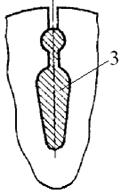
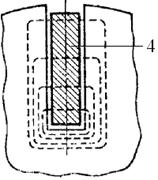
รูปที่ 2.30 - รูปแบบของร่องของโรเตอร์สองเซลล์และร่องลึก
มีการออกแบบโรเตอร์แบบอื่นๆ ที่มีโครงแบบสองชั้น เช่น ร่องรูปทรง 3 ที่เติมด้วยอะลูมิเนียม (รูปที่ 2.30b) ที่นี่ความต้านทานแบบแอคทีฟที่เพิ่มขึ้นของเซลล์ในระหว่างการเริ่มต้นมีให้โดยการเปลี่ยนกระแสไปยังส่วนบนของตัวนำเท่านั้นเนื่องจากวัสดุของทั้งสองเซลล์เหมือนกัน การออกแบบนี้ง่ายกว่าและถูกกว่า แต่ลักษณะการสตาร์ทของเครื่องยนต์ค่อนข้างแย่
ในทำนองเดียวกันการกระจัดของกระแสเข้าสู่ส่วนบนของตัวนำในระหว่างการเริ่มต้นเมื่อความถี่ปัจจุบันในโรเตอร์สูงจะมีอยู่ในโรเตอร์ร่องลึก (รูปที่ 2.30c) ซึ่งตัวนำ 4 มักจะเป็นทองแดง , สูงยาวมาก. การกระจัดของกระแสเข้าสู่ส่วนบนของตัวนำนั้นเทียบเท่ากับการลดลงของหน้าตัดและให้ความต้านทานแอคทีฟของโรเตอร์เพิ่มขึ้นในระหว่างการสตาร์ทและกระแสเริ่มต้นลดลง
ทุกคนที่ได้พบกับการสตาร์ทของมอเตอร์ไฟฟ้าจะคุ้นเคยกับนิพจน์ กระแสเริ่มต้นของมอเตอร์ไฟฟ้า เมื่อสตาร์ท กระแสเริ่มต้นของมอเตอร์ไฟฟ้า ขึ้นอยู่กับกำลังและความเร็วที่กำหนด อาจมีค่าตั้งแต่ 2 ถึง 8 เท่า
ทั้งหมดนี้ส่งผลเสียต่อการทำงานของผู้บริโภครายอื่นที่ทำงานในสายเดียวกันกับอุปกรณ์นี้ ด้วยการเปิดตัวดังกล่าวซึ่งมีลักษณะเฉพาะ ระดับสูงการใช้พลังงานปฏิกิริยาในช่วงเวลาสั้น ๆ มอเตอร์ไฟฟ้าอื่น ๆ และผู้บริโภคที่ตัวบ่งชี้ความเสถียรของแรงดันไฟฟ้ามีความสำคัญอยู่ในสถานะที่ไม่สบายใจ สถานการณ์นี้นำไปสู่ผลที่คาดเดาไม่ได้ในการทำงานของอุปกรณ์ไฟฟ้านี้ ท้ายที่สุดแล้วการเริ่มต้นแต่ละครั้งจะลดแรงดันไฟฟ้าของเครือข่ายอุปทานลงอย่างรวดเร็ว เพื่อลดผลกระทบด้านลบของกระบวนการดังกล่าว มีการใช้วิธีการดั้งเดิมหลายอย่างเพื่อลด
1. การสตาร์ทมอเตอร์ไฟฟ้าจะดำเนินการหลังจากถอดโหลดทางกลบนเพลาขับของมอเตอร์ไฟฟ้า ซึ่งเรียกว่าสตาร์ทรอบเดินเบา จากนั้นโหลดมอเตอร์ไฟฟ้าแล้วค่อยๆ เข้าสู่โหมดการทำงาน วิธีนี้ใช้ได้กับการทำงานของปั๊มและ ระบบระบายอากาศที่ซึ่งสามารถควบคุมโหลดของมอเตอร์ไฟฟ้าได้โดยใช้องค์ประกอบล็อควัสดุสิ้นเปลืองและการดูด ซึ่งจะช่วยลดปริมาณพลังงานปฏิกิริยาและด้วยเหตุนี้ กระแสไฟสตาร์ทมอเตอร์
2. เปิดมอเตอร์ไฟฟ้าตามแบบรูปดาว → เดลต้า วิธีนี้ใช้ได้ภายใต้เงื่อนไขบางประการ มอเตอร์ต้องมีขดลวดสำหรับช่วงแรงดันไฟฟ้าที่ต้องการ สำหรับเครือข่ายอุตสาหกรรมของเรา ช่วงนี้คือ 380/660V หากตรงตามเงื่อนไขนี้ มอเตอร์จะเริ่มทำงานในโหมดซอฟต์ ซึ่งกระแสเริ่มต้นไม่เกินกระแสที่กำหนดมากกว่า 2 เท่า
3. เริ่มต้นการแปลงอัตโนมัติ การเริ่มต้นในลักษณะนี้ค่อนข้างชวนให้นึกถึงการกระทำก่อนหน้านี้ เฉพาะการจ่ายแรงดันไฟไปยังมอเตอร์ไฟฟ้าที่สตาร์ทเท่านั้นที่กระทำโดยการใช้แรงดันไฟฟ้าอย่างราบรื่นผ่านตัวเปลี่ยนรูปแบบอัตโนมัติ
การเปิดตัวประเภทนี้ไม่ได้ใช้งานจริงในแง่ของ ค่าใช้จ่ายสูงและขนาดที่สำคัญของบัลลาสต์
4. การใช้ตัวต้านทานเริ่มต้นหรือเครื่องปฏิกรณ์เพื่อจำกัดกระแสเริ่มต้น ในกรณีที่กระแสเกินค่าที่กำหนดไว้ล่วงหน้าถูกปล่อยออกมาในรูปของพลังงานความร้อนบนตัวต้านทานดับ
5. ตัวควบคุมความถี่ ทิศทางใหม่ในการเปิดตัวโซลูชั่นและความสามารถในการลด . วิธีนี้ใช้ได้ทุกที่ที่จำเป็นและไม่จำเป็น วิธีการเริ่มต้นนี้ไม่ต้องการการลงทุนจำนวนมาก ทรัพยากรทางการเงินหากเกี่ยวข้องกับมอเตอร์ไฟฟ้าขนาดเล็ก 10-30 กิโลวัตต์ เมื่อติดตั้งมอเตอร์ไฟฟ้าที่มีกำลังสูงกว่าด้วยอุปกรณ์ดังกล่าว ค่าใช้จ่ายของมอเตอร์ไฟฟ้าอาจสูงกว่าต้นทุนของมอเตอร์ไฟฟ้าเองอย่างมาก
6. อุปกรณ์สตาร์ทแบบอ่อนตามองค์ประกอบอิเล็กทรอนิกส์แบบโซลิดสเตตที่ทันสมัย - ไทริสเตอร์ อุปกรณ์เริ่มต้นดังกล่าวถูกควบคุมโดยวิธีการควบคุมเฟส แต่วิธีนี้มีอย่างหนึ่ง ข้อเสียที่สำคัญในเครือข่ายที่มีกำลังไฟไม่เพียงพอ แรงดันไฟฟ้าตกไม่สามารถชดเชยได้ อุปกรณ์ดังกล่าวอยู่ภายใต้โหมดการทำงานที่สำคัญใน โหมดนี้และความล้มเหลวเป็นเรื่องของเวลา
ในการแก้ปัญหานี้ ผู้บริโภคต้องหาทางออกที่ยอมรับได้สำหรับการเปิดตัวที่มีประสิทธิภาพและปลอดภัย มอเตอร์ไฟฟ้าทรงพลังและลด
ไม่มีโพสต์ที่เกี่ยวข้อง
ข้อจำกัดของกระแสเริ่มต้นแบบอะซิงโครนัส
เมื่อมอเตอร์แบบอะซิงโครนัสเชื่อมต่อกับเครือข่าย กระแสเริ่มต้นขนาดใหญ่จะเกิดขึ้น ซึ่งเกินกระแสที่กำหนดใน 5…
7 ครั้งและทำให้เกิดแรงดันไฟฟ้าตกในสายอย่างมีนัยสำคัญ ซึ่งอาจนำไปสู่การหยุดการทำงานของมอเตอร์จำนวนหนึ่ง ภายใต้การกระทำของกระแสเริ่มต้น แรงไดนามิกเกิดขึ้นในมอเตอร์ที่สร้างความเสียหายและทำลายขดลวด หม้อแปลงไฟฟ้าและสายซึ่งนำไปสู่การสูญเสียพลังงานเพิ่มเติม - ข้อ จำกัด ของกระแสเริ่มต้นมีความสำคัญอย่างยิ่งสำหรับการติดตั้งทางการเกษตรเนื่องจากความห่างไกลของมอเตอร์ไฟฟ้าจากแหล่งพลังงานและความสามารถในการเปรียบเทียบของกำลังของหม้อแปลงไฟฟ้าและกำลังเริ่มต้นของมอเตอร์ไฟฟ้า บ่อยครั้งเริ่มทำให้ขดลวดของมอเตอร์ร้อนขึ้น
มีหลายวิธีในการจำกัดกระแสเริ่มต้น: โดยการเพิ่มความต้านทานแบบแอคทีฟหรืออุปนัยเพิ่มเติมในวงจรสเตเตอร์ รวมความต้านทานเชิงแอคทีฟหรืออุปนัยเพิ่มเติมในวงจรโรเตอร์ เปลี่ยนขดลวดสเตเตอร์สำหรับช่วงเวลาเริ่มต้นจาก "สามเหลี่ยม" เป็น "ดาว" แรงดันตกคร่อมสเตเตอร์ แบบแผนสำหรับการลดกระแสเริ่มต้นโดยการเปลี่ยนขดลวดจาก "ดาว" เป็น "สามเหลี่ยม" (รูปที่ 4.21) สามารถแนะนำสำหรับมอเตอร์ไฟฟ้าที่ขดลวดเฟสได้รับการออกแบบสำหรับแรงดันไฟฟ้าเชิงเส้น สิ่งนี้ใช้กับไดรฟ์ไฟฟ้าของเครื่องบดย่อยแบบกด เครื่องบดที่มีประสิทธิภาพเป็นต้น) ในเครือข่ายที่มีแรงดันไฟฟ้า 380 V จำเป็นต้องใช้มอเตอร์ที่ออกแบบมาสำหรับแรงดันไฟฟ้า 660/380 V ด้วยแรงดันไฟหลัก 380 Vu แรงดันไฟฟ้าของมอเตอร์จะต้องเท่ากับ 380/220 V
พิจารณาอัตราส่วนของกระแสเริ่มต้นของมอเตอร์เมื่อเชื่อมต่อกับ "ดาว":
(4.73)
เมื่อเปิดเครื่องจะมีความต้านทานรวมของขดลวดสเตเตอร์ 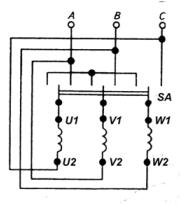
ข้าว. 4.21. วงจรสวิตชิ่งขดลวดสเตเตอร์แบบอะซิงโครนัส
มอเตอร์จากสตาร์ถึงเดลต้า
กระแสเริ่มต้นมอเตอร์เมื่อขดลวดกลายเป็น "สามเหลี่ยม": ![]()
อัตราส่วนปัจจุบัน:  (4.74)
(4.74)
ดังนั้นเมื่อเปิดขดลวดมอเตอร์ใน "ดาว" กระแสเฟสจะลดลงตามปัจจัยหนึ่งและกระแสเชิงเส้นเป็นปัจจัยสาม เมื่อแรงดันเฟสลดลงหนึ่งปัจจัย แรงบิดของมอเตอร์จะลดลงสามเท่า
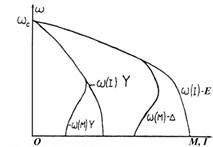
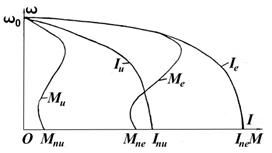
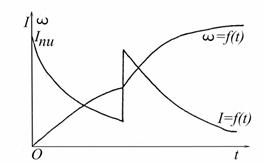
รูปที่ 4.22 ลักษณะของมอเตอร์แบบอะซิงโครนัสที่
เปลี่ยนขดลวดสเตเตอร์จากสตาร์เป็นเดลต้า
ลักษณะทางกลและไฟฟ้าเมื่อสตาร์ทเครื่องยนต์ในลักษณะนี้แสดงในรูปที่ 4.22 กระแสเริ่มต้นของมอเตอร์เหนี่ยวนำสามารถถูกจำกัดโดยการลดแรงดันสเตเตอร์
กระแสเริ่มต้นของมอเตอร์แบบอะซิงโครนัสที่แรงดันไฟฟ้าที่กำหนดคือ:
ความต้านทานของเฟสมอเตอร์อยู่ที่ไหนในขณะที่เปิดเครื่อง
เพื่อลดกระแสเริ่มต้นโดยปัจจัยหนึ่ง แรงดันไฟฟ้าบนสเตเตอร์ของมอเตอร์เหนี่ยวนำจะต้องลดลงตามจำนวนครั้งที่เท่ากัน
(4.75)
การลดลงของแรงดันไฟฟ้าบนสเตเตอร์ทำให้แรงบิดเริ่มต้นของมอเตอร์ลดลงในหรือ (1 -. รูปที่ 4.23 แสดงลักษณะทางกลและทางไฟฟ้าของมอเตอร์เหนี่ยวนำเมื่อกระแสเริ่มต้นลดลงสองเท่า ลดลงอย่างมีนัยสำคัญใน แรงบิดเริ่มต้นช่วยให้คุณใช้งานได้ ทางนี้ส่วนใหญ่เมื่อสตาร์ทเครื่องยนต์บน ไม่ทำงานด้วยช่วงเวลาเริ่มต้นที่ค่อนข้างเล็ก
รูปที่ 4.23 ลักษณะของมอเตอร์เหนี่ยวนำเมื่อก้าวลง
แรงดันไฟฟ้า.
ในการคำนวณ เมื่อเลือกมอเตอร์ จำเป็นต้องตรวจสอบความเป็นไปได้ในการเริ่มต้นด้วยแรงดันไฟฟ้าที่ลดลง: .
คุณสามารถจำกัดกระแสเริ่มต้นของมอเตอร์แบบอะซิงโครนัสโดยรวมความต้านทานแบบแอคทีฟหรืออุปนัยเพิ่มเติมในวงจรสเตเตอร์
การคำนวณค่าความต้านทานเชิงรุกหรือเชิงอุปนัยเพิ่มเติมเริ่มต้นด้วยการเลือกกระแสเริ่มต้นที่ต้องการและการกำหนดอัตราส่วนการลดลงของกระแสนี้:
,
โดยที่กระแสเริ่มต้นของมอเตอร์ในกรณีที่ไม่มีความต้านทานอยู่ที่
วงจรสเตเตอร์ =
แรงดันไฟฟ้าเฟสที่กำหนดของเครือข่าย ความต้านทานขดลวดสเตเตอร์ - กระแสเริ่มต้นด้วยการแนะนำความต้านทานเพิ่มเติมในวงจรสเตเตอร์  - ความต้านทานของวงจรขดลวดสเตเตอร์เมื่อแนะนำหรือ
- ความต้านทานของวงจรขดลวดสเตเตอร์เมื่อแนะนำหรือ
ให้เราแทนค่าของกระแสและ
ก =  .
.
ในการกำหนดค่าที่ต้องการ สามเหลี่ยมแนวต้านจะถูกสร้างขึ้น (รูปที่ 4.24)
เราคำนวณความต้านทานของขดลวดมอเตอร์:
จากนั้นการต่อต้านแบบแอคทีฟ
,
ตัวประกอบกำลังของเครื่องยนต์อยู่ที่ไหนเมื่อสตาร์ทเครื่อง 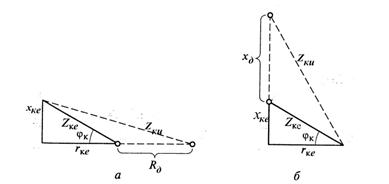
รูปที่ 4.24 เริ่มต้นสามเหลี่ยมความต้านทานเมื่อมอเตอร์แบบอะซิงโครนัสเชื่อมต่อกับวงจรสเตเตอร์: a - ความต้านทานที่ใช้งาน;
ข - ความต้านทานอุปนัย
ปฏิกิริยาอุปนัย ![]()
จากสามเหลี่ยมแนวต้าน (รูปที่ 4.25, a) เรามี
(4.76)
ในทำนองเดียวกัน เรากำหนดค่าของการอุปนัยเพิ่มเติม
แนวต้าน (รูปที่ 4.24, b): ![]() (4.77)
(4.77)
ลักษณะทางกลและทางไฟฟ้าของเครื่องยนต์พร้อมการแนะนำความต้านทานเพิ่มเติมได้รับการพิจารณาก่อนหน้านี้
ไดอะแกรมสตาร์ทเครื่องยนต์แสดงในรูปที่ 4.25 ความต้านทานหรือถูกปิดหลังจากที่มอเตอร์เร่งความเร็วหรือในบางจุดที่กระแสไฟกระชากไม่เกิน
การจำกัดกระแสเริ่มต้นของมอเตอร์แบบอะซิงโครนัสสามารถทำได้โดยการรวมตัวต้านทานเพิ่มเติมในวงจรโรเตอร์ เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสด้วยเฟสโรเตอร์ที่มีวงแหวนลัดวงจร แรงบิดเริ่มต้นคือ (0.5 ... 1.5) และกระแสสเตเตอร์และโรเตอร์จะเกินพิกัดกระแส 5 ... 10 เท่า
รูปที่ 4.25 การเริ่มต้นเส้นโค้งปัจจุบันของมอเตอร์แบบอะซิงโครนัสด้วย
โดยใช้ตัวต้านทานในวงจรสเตเตอร์
การแนะนำความต้านทานแบบแอคทีฟในวงจรโรเตอร์จะลดกระแสของมอเตอร์และเพิ่มแรงบิดเริ่มต้นขึ้น (ดูรูปที่ 4.7) วงจรสำหรับการสลับบนสเตจของตัวต้านทานเริ่มต้นแสดงในรูปที่ 4.2, 6
ข้าว. 4.26. แบบแผนสำหรับการเปิดตัวต้านทานเริ่มต้นของอะซิงโครนัส
เครื่องยนต์.
4.11. การคำนวณตัวต้านทานเริ่มต้นสำหรับมอเตอร์แบบอะซิงโครนัส
การคำนวณตัวต้านทานเริ่มต้นสำหรับมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์จะคล้ายกับการคำนวณตัวต้านทานเริ่มต้นสำหรับมอเตอร์แบบแบ่งและแบบอนุกรม ในกรณีนี้ ต้องคำนึงว่าโมเมนต์เป็นสัดส่วนกับกระแสในส่วนการทำงานของลักษณะทางกลของมอเตอร์เหนี่ยวนำ ดังนั้น การคำนวณจะดำเนินการเป็นโมเมนต์ ไม่ใช่สำหรับกระแส ค่าของแรงบิดเริ่มต้นสูงสุดถูกจำกัดโดยแรงไดนามิกในขดลวดและการให้ความร้อนของเครื่องจักร ในบางกรณี ช่วงเวลานี้ถูกจำกัดโดยข้อกำหนดของเทคโนโลยี การคำนวณความต้านทานของตัวต้านทานเริ่มต้นสามารถทำได้โดยใช้วิธีการที่แม่นยำและเป็นค่าประมาณ วิธีการวิเคราะห์และแบบกราฟิก พิจารณาวิธีการโดยประมาณซึ่งใช้สำหรับแรงบิดสวิตชิ่งสูงสุดไม่เกิน 0.7 แผนภาพสำหรับการสตาร์ทมอเตอร์แบบอะซิงโครนัสในสองขั้นตอนแสดงในรูปที่ 4.28
วิธีการวิเคราะห์หากกำหนดจำนวนขั้นตอน m แล้ว
อัตราส่วนแรงบิดสลับ ![]() (4.78)
(4.78)
ความต้านทานสูงสุดของวงจรโรเตอร์ในขณะที่เปิดเครื่องอยู่ที่ไหน ![]() ; มาตราส่วนความต้านทาน
; มาตราส่วนความต้านทาน
รูปที่ 4.28 ไดอะแกรมเริ่มต้นของมอเตอร์แบบอะซิงโครนัส  , - ความต้านทานโรเตอร์, ab
, - ความต้านทานโรเตอร์, ab
หลังจากแทนที่ค่าและ  (4.79)
(4.79)
เซ็กเมนต์ ab = และขนาดของเซ็กเมนต์ถูกกำหนดจากที่คล้ายกัน
สามเหลี่ยม Oad และ ofl:
ad/ao = lf/of;
ส่วน aO = ; lf = 1; jf = ดังนั้น:
โฆษณา= ao lf/of = ; .
; .
ทางนี้,
ค่าต้องมากกว่า นั่นคือ . โดยเปรียบเทียบกับรถยนต์ กระแสตรง(บทที่ 2 และ 3)
กำหนดแนวต้าน:
(4.80)
เมื่อไม่ได้กำหนดจำนวนขั้นตอน เราจะนำค่าของเวลาเปลี่ยน และ จากนั้นกำหนดจำนวนขั้นตอน m:
(4.81)
(4.82)
โดยที่ เป็นค่าเล็กน้อยของ EMF และกระแสของโรเตอร์
สำหรับการตรวจสอบ จำเป็นต้องกำหนดความต้านทานของโรเตอร์และเปรียบเทียบกับวิธีกราฟิกที่ได้รับ ![]() (4.83)
(4.83)
4.12. ไดรฟ์ไฟฟ้าพร้อมมอเตอร์ไฟฟ้าเชิงเส้น
ปัจจุบัน มีการใช้มอเตอร์ไฟฟ้าแบบอนุกรมประมาณ 40-50% ในกลไกการผลิตที่มีการเคลื่อนที่แบบแปลนหรือแบบลูกสูบของตัวเครื่อง สำหรับการแปลง การเคลื่อนที่แบบหมุนมีการใช้อุปกรณ์หลากหลายในการแปล: ระบบส่งกำลังแบบนิวแมติกและไฮดรอลิก, "สกรู - น๊อต"; กลไกข้อเหวี่ยง, ปีกนกและแร็ค, โครงสร้างล้อและรางใน ระบบขนส่งและอื่น ๆ นอกจากนี้ในไดรฟ์ดังกล่าวตามกฎแล้วจะใช้ตัวลดซึ่งเป็นที่ตั้งของความสูญเสียและความล้มเหลวเพิ่มเติม
มอเตอร์ไฟฟ้าเชิงเส้นช่วยให้การเคลื่อนที่แบบแปลนโดยตรงโดยไม่มีการสัมผัสทางกลระหว่างโครงสร้างหลัก (โดยปกติคือสเตเตอร์) และโครงสร้างรอง (โรเตอร์) ดังนั้นจึงขจัดกลไกการส่งสัญญาณ ในเวลาเดียวกัน รูปแบบจลนศาสตร์นั้นง่ายขึ้นอย่างมาก ความน่าเชื่อถือ ความแม่นยำในการควบคุมเพิ่มขึ้น และ มอเตอร์ไฟฟ้าเชิงเส้นเข้ากันได้ดี กลไกการบริหารมีความสามารถในการผลิตและใช้เหล็กน้อยลงเนื่องจากการตัดที่สิ้นเปลืองน้อย
ในทางปฏิบัติสมัคร มอเตอร์เชิงเส้นกระแสตรง (ส่วนใหญ่เหยียบ), อะซิงโครนัส (LAD), ซิงโครนัส (LSD) และแม่เหล็กไฟฟ้า (LEMD) มอเตอร์แบบอะซิงโครนัสเชิงเส้นกำลังได้รับความนิยมเนื่องจากความเรียบง่ายในการออกแบบ ต้นทุนต่ำ ความสามารถในการผลิต ความน่าเชื่อถือ ความหลากหลายของโซลูชันการออกแบบ โครงสร้าง LAD เป็นทรงกระบอกและแบน
รูปที่ 4.29 แสดงอุปกรณ์ LIM แบบแบน
รูปที่ 4.29 อุปกรณ์ของมอเตอร์อะซิงโครนัสเชิงเส้นแบน:
ตัวเหนี่ยวนำ 1 ตัวพร้อมขดลวด (สเตเตอร์); 2 - บัสปฏิกิริยา; 3- วงจรแม่เหล็กย้อนกลับ; เอ - LAD ทวิภาคี; b - LAD ด้านเดียว; c - ขดลวดลัดวงจรพร้อมวงจรแม่เหล็กย้อนกลับ
พารามิเตอร์การเคลื่อนที่ของ LIM ถูกควบคุมในลักษณะเดียวกับ IM ทั่วไป โดยการเปลี่ยนความต้านทานของบัสปฏิกิริยา โดยการควบคุมความถี่และระยะเวลาของการเปิดเครื่อง LAD ใช้ในสายพานลำเลียง, เครื่องกวนของบังเกอร์ - เครื่องป้อนสินค้าขนาดใหญ่, ยานพาหนะ, เครื่องมือช่างเป็นต้น ข้อได้เปรียบที่สำคัญ LAD มีมูลค่าสูง
ในกรณีส่วนใหญ่ มอเตอร์แบบอะซิงโครนัสจะถูกเปิดโดยการเชื่อมต่อโดยตรงกับเครือข่าย ในวงจรสเตเตอร์ของมอเตอร์ หน้าสัมผัสของสตาร์ทแม่เหล็กไฟฟ้าจะปิด ขดลวดเชื่อมต่อกับแรงดันไฟฟ้าเชิงเส้นของเครือข่าย สนามแม่เหล็กไฟฟ้าหมุนปรากฏขึ้น และไดรฟ์เริ่มทำงาน
แน่นอน ในกรณีนี้ กระแสไหลเข้าเกิดขึ้น เกินค่าระบุห้าถึงเจ็ดครั้ง และระยะเวลาของการขว้างนี้ขึ้นอยู่กับระยะเวลาของการสตาร์ทนั่นคือกำลังของเครื่องยนต์ ยังไง เครื่องยนต์มากขึ้นยิ่งเขาเร่งความเร็วนานเท่าไรและผลของกระแสไฟที่เพิ่มขึ้นในเครือข่ายอุปทานและขดลวดสเตเตอร์ก็จะยิ่งนานขึ้นเท่านั้น
สำหรับไดรฟ์ไฟฟ้าแบบอะซิงโครนัส "อ่อน" ที่มีกำลังไม่เกิน 3 กิโลวัตต์ ข้อเสียของการเชื่อมต่อโดยตรงกับเครือข่ายเหล่านี้ไม่สำคัญ แน่นอนว่ากระแสไฟที่เกิดขึ้นไม่สามารถละเลยได้ แม้แต่เครือข่ายในครัวเรือน กระแสสลับมักจะมีการสำรองพลังงานเพื่อรองรับการโอเวอร์โหลดชั่วขณะ
สำหรับตัวมอเตอร์ขับเคลื่อนเอง หากไม่มีแรงดันตก มันจะสตาร์ทเสมอโดยไม่มีผลกระทบใดๆ ต่อตัวมันเอง ดังนั้นการเชื่อมต่อโดยตรงกับเครือข่ายจึงมักใช้สำหรับไดรฟ์แบบอะซิงโครนัสของการติดตั้งปั๊มและพัดลมขนาดเล็ก เลื่อยวงเดือน กากตะกอน เครื่องจักรโลหะ
การสตาร์ทของไดรฟ์เหล่านี้เกิดขึ้นในสภาวะที่ค่อนข้างเอื้ออำนวย และมอเตอร์ได้รับการออกแบบสำหรับ งานประจำเมื่อเชื่อมต่อขดลวดสเตเตอร์กับ "ดาว" และแรงดันไฟฟ้าเชิงเส้น 380 โวลต์ (แรงดันไฟฟ้าเล็กน้อย 380/220 โวลต์)
แต่เมื่อกำลังเครื่องยนต์อยู่ที่ประมาณ 10, 15 กิโลวัตต์ขึ้นไป การเชื่อมต่อโดยตรงกับเครือข่ายจะกลายเป็นสิ่งที่ยอมรับไม่ได้ จากนั้นกระแสไฟกระชากจะต้องถูก จำกัด เนื่องจากจะสร้างภาระที่ไม่จำเป็นบนเครือข่ายและอาจทำให้เกิด "การดึง" ของแรงดันไฟฟ้า
วิธีที่นิยมมากที่สุดในการจำกัดกระแสไหลเข้าของไดรฟ์แบบเหนี่ยวนำคือการสตาร์ทด้วยแรงดันไฟต่ำ สำหรับมอเตอร์ขนาด 660/380 โวลต์ การสตาร์ทดังกล่าวสามารถทำได้ในทางเทคนิคโดยการเปลี่ยนขดลวดจากสตาร์เป็นเดลต้า ใน "ดาว" มอเตอร์ใช้กระแสไฟน้อยลงและภาระในเครือข่ายลดลง
การสลับไปที่ "สามเหลี่ยม" ไม่กี่วินาทีหลังจากการสตาร์ทสามารถจัดเรียงได้โดยใช้รีเลย์เวลาหรือโดยการควบคุมกระแสในวงจรสเตเตอร์ อย่างไรก็ตาม มีปัญหาอย่างหนึ่งคือ เมื่อแรงดันไฟฟ้าของแหล่งจ่ายลดลง แรงบิดของมอเตอร์บนเพลาก็ลดลงด้วย
ยิ่งกว่านั้นหากแรงดันไฟฟ้าลดลงครึ่งหนึ่งช่วงเวลานั้นก็ลดลงสี่เท่า - การพึ่งพาอาศัยกันนั้นเป็นกำลังสอง และแม้ว่าข้อเท็จจริงที่ว่าแรงบิดเริ่มต้นของมอเตอร์แบบอะซิงโครนัสจะถูกจำกัดอยู่แล้วเนื่องจากลักษณะเฉพาะของลักษณะทางกลแบบอะซิงโครนัส
ดังนั้นการลดแรงดันไฟฟ้าและการเปลี่ยนจาก "ดาว" เป็น "เดลต้า" จึงถูกใช้เฉพาะในไดรฟ์ไฟฟ้าที่มีความสามารถทางเทคโนโลยีในการเริ่มทำงานในกรณีที่ไม่มีโหลดบนเพลา สิ่งนี้เกี่ยวข้องกับการขับเคลื่อนเครื่องยนต์ของคอนเวอร์เตอร์ยูนิต สำหรับการขับเคลื่อนของเครื่องเลื่อยหลายใบที่ทรงพลังและตัวขับที่คล้ายกัน
การสตาร์ทด้วยแรงดันไฟฟ้าที่ลดลงนั้นไม่เหมาะเลย ตัวอย่างเช่น สำหรับระบบขับเคลื่อนสายพานลำเลียง ซึ่งเกือบทุกครั้งจะต้องสตาร์ทในสถานะโหลด สำหรับไดรฟ์ดังกล่าวจะใช้การสตาร์ทแบบรีโอสแตติกซึ่งช่วยให้คุณ จำกัด กระแสสตาร์ทของมอเตอร์ แต่ไม่ลดแรงบิด
สำหรับการสตาร์ทแบบรีโอสแตติกจะใช้มอเตอร์ที่มีเฟสโรเตอร์ ซึ่งช่วยให้คุณสามารถเพิ่มความต้านทานในวงจรของคุณได้ ความต้านทานยังสามารถส่งออกเป็นสเตจได้ ในขณะที่การเริ่มต้นจะราบรื่นขึ้น การควบคุม Rheostat มักใช้เพื่อเปลี่ยนความเร็วของไดรฟ์ระหว่างการทำงาน
แต่ประสิทธิภาพสูงสุดสำหรับไดรฟ์แบบอะซิงโครนัสคือการเริ่มใช้ ตัวแปลงความถี่(พีซี). ด้วยการเปลี่ยนความถี่และขนาดของแรงดันไฟฟ้า ตัวแปลงช่วยให้มอเตอร์แบบอะซิงโครนัสสามารถสตาร์ทและทำงานด้วยประสิทธิภาพสูงสุดซึ่งเป็นส่วนหนึ่งของไดรฟ์ใดๆ ในกรณีนี้ไม่รวมไฟกระชากในปัจจุบันและแรงบิดถึงค่าสูงสุดที่เป็นไปได้
บทความนี้จะพิจารณาการเปลี่ยนแปลงของแรงดันไฟฟ้า (การสูญเสียแรงดันไฟฟ้า) เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอก (ต่อไปนี้จะเรียกว่ามอเตอร์) และผลกระทบต่อการเปลี่ยนแปลงแรงดันไฟฟ้าที่ขั้วของเครื่องรับไฟฟ้าอื่นๆ
เมื่อเปิดเครื่อง กระแสไฟเริ่มต้นอาจเกินพิกัดกระแส 5-7 เท่า ซึ่งเป็นสาเหตุที่การรวมเครื่องยนต์ขนาดใหญ่ส่งผลกระทบอย่างมากต่อการทำงานของเครื่องรับที่เชื่อมต่อกับเครือข่าย
นี่เป็นเพราะความจริงที่ว่ากระแสเริ่มต้นทำให้เกิดการสูญเสียแรงดันไฟฟ้าในเครือข่ายเพิ่มขึ้นอย่างมากอันเป็นผลมาจากแรงดันไฟฟ้าที่ขั้วของเครื่องรับลดลงอีก สิ่งนี้เห็นได้ชัดเจนในหลอดไส้เมื่อฟลักซ์การส่องสว่างลดลงอย่างรวดเร็ว (ไฟกะพริบ) เครื่องยนต์ที่ทำงานอยู่ในขณะนี้ช้าลงและอาจหยุดทำงานพร้อมกันภายใต้เงื่อนไขบางประการ
นอกจากนี้อาจเกิดขึ้นที่เครื่องยนต์สตาร์ทเองเนื่องจากแรงดันไฟฟ้าตกอย่างแรงจะไม่สามารถปรับใช้กลไกที่ติดอยู่กับมันได้
โหมดสตาร์ทเครื่องยนต์จะพิจารณาเมื่อ โหลดสูงสุดเส้นเนื่องจากอยู่ภายใต้เงื่อนไขดังกล่าวที่มีการสร้างเงื่อนไขที่ไม่เอื้ออำนวยมากที่สุดสำหรับการทำงานของเครื่องรับที่เชื่อมต่อกับเครือข่าย
ในการตรวจสอบว่าสามารถเปิดเครื่องยนต์ได้หรือไม่ คุณจำเป็นต้องคำนวณแรงดันไฟฟ้าที่ขั้วระหว่างสตาร์ทเครื่องและแรงดันไฟฟ้าของเครื่องยนต์ที่ทำงานอยู่อื่นๆ และตรวจสอบแรงดันไฟฟ้าที่หลอดไฟด้วย
ตัวอย่างความเป็นไปได้ในการสตาร์ทมอเตอร์ไฟฟ้า 380 V
ที่จำเป็น ตรวจสอบความเป็นไปได้ในการสตาร์ทมอเตอร์ไฟฟ้าประเภท 4A250M2 U3 ที่มีกำลัง 90 กิโลวัตต์ จากบัส 6 kV ของสถานีย่อย 2RP-1 สถานีย่อยที่มีหม้อแปลงประเภท TM ที่มีความจุ 320 kVA จะถูกป้อน จากสถานีย่อย 2RP-1 ถึงหม้อแปลง TM-6 / 0.4 kV พร้อมการติดตั้งก๊อก 0% วางสายเคเบิลแบรนด์ AAB ที่มีหน้าตัดขนาด 3x70 mm2 ความยาวสาย 850 ม. เชื่อมต่อกับ RU-0.4 kV รถโดยสารที่มีสายเคเบิลของแบรนด์ AAB ที่มีหน้าตัดขนาด 3x95 mm2 เครื่องยนต์ยาว 80 ม. ประเภท 4A250M2 U3
ข้าว. 1 - ไดอะแกรมบรรทัดเดียว 0.4 kV
ในขณะที่สตาร์ทเครื่องยนต์ 4A250M2 U3 เครื่องยนต์ 4A250S2 U3 เชื่อมต่อกับยางด้วยกำลัง 75 kW และแรงดันไฟที่ขั้ว 365 V กำลังทำงาน แรงดันไฟฟ้าบนยางคือ 0.4 kV เมื่อสตาร์ทเครื่องยนต์ อุช = 380 โวลต์
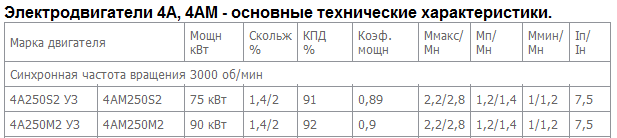
- Mmax / Mn - หลายหลาก แรงบิดสูงสุด;
- Мп/Мн – แรงบิดเริ่มต้นหลายหลาก
- Mn คือแรงบิดสูงสุดของมอเตอร์
การคำนวณ:
ที่ไหน:
Kstart \u003d 7.5 - หลายหลากของกระแสเริ่มต้นตามหนังสือเดินทางสำหรับเครื่องยนต์
3. เรากำหนดค่าความต้านทานเชิงแอคทีฟและอุปนัยสำหรับสายเคเบิลอลูมิเนียมของแบรนด์ AAB ที่มีหน้าตัดขนาด 3x70 mm2 สำหรับแรงดันไฟฟ้า 6 kV จากบัสของสถานีย่อย 2RP-1 ไปยังหม้อแปลงประเภท TM 320 kVA , เราใช้ค่าความต้านทานจากตาราง 2.5 [L2.s 48]
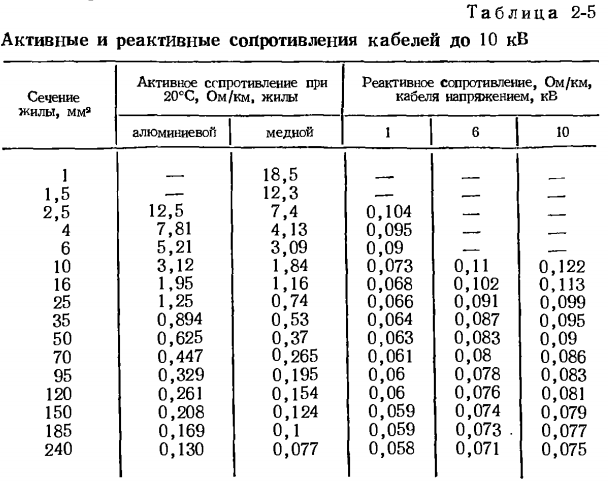
เราได้ค่าความต้านทาน Rv = 0.447 Ohm / km และ Xv = 0.08 Ohm / km
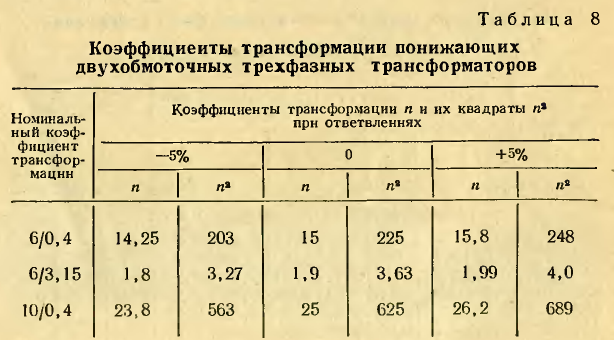
ต้องนำตัวต้านทานเหล่านี้ไปทางด้านแรงดันต่ำของหม้อแปลงไฟฟ้า เนื่องจากมอเตอร์เชื่อมต่อกับเครือข่ายไฟฟ้าแรงต่ำ จากตารางที่ 8 [L1, p. 93] สำหรับอัตราส่วนการเปลี่ยนแปลงเล็กน้อยที่ 6 / 0.4 kV และสาขา 0% เราพบค่า n = 15
4. เรากำหนดความต้านทานเชิงแอคทีฟและอุปนัยของสายเคเบิลที่สัมพันธ์กับเครือข่ายแรงดันต่ำตามสูตร [L1, p. 13]:
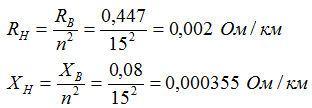
ที่ไหน:
Rv และ Xv - ความต้านทานของเครือข่ายจากด้านข้างของแรงดันไฟฟ้าที่สูงขึ้น
n \u003d 6 / 0.4 \u003d 15 - อัตราส่วนการเปลี่ยนแปลงของหม้อแปลงแบบสเต็ปดาวน์
5. เรากำหนดความต้านทานของสายเคเบิลที่มีความยาว 850 ม. จากสถานีย่อย 2RP-1 ถึงหม้อแปลง 6 / 0.4 kV:
Rc \u003d Rn * L \u003d 0.002 * 0.85 \u003d 0.0017 โอห์ม;
Xs \u003d Xn * L \u003d 0.000355 * 0.85 \u003d 0.0003 โอห์ม;
6. เรากำหนดความต้านทานของหม้อแปลงไฟฟ้าที่มีกำลัง 320 kVA, 6 / 0.4 kV ตามตารางที่ 7 [L1, p. 92.93]
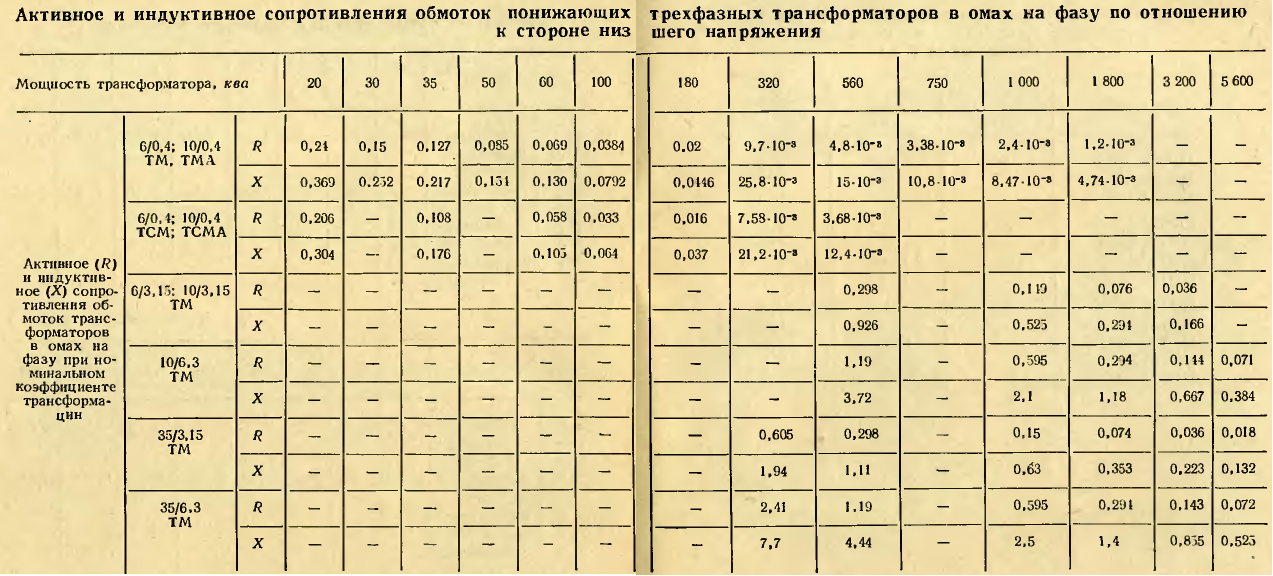
Rt \u003d 9.7 * 10 -3 \u003d 0.0097 โอห์ม;
Xt \u003d 25.8 * 10 -3 \u003d 0.0258 โอห์ม;
7. เรากำหนดความต้านทานสายจากบัสของสถานีย่อย 2RP-1 ถึงบัสแรงดันต่ำของสถานีย่อย:
Rsh \u003d Rc + Rt \u003d 0.0017 + 0.0097 \u003d 0.0114 โอห์ม;
Xsh \u003d Xs + Xt \u003d 0.0003 + 0.0258 \u003d 0.0261 โอห์ม;
8. เรากำหนดความต้านทานของสายเคเบิลยาว 80 ม. ยี่ห้อ AAB 3x95 mm2 จากบัสบาร์แรงดันต่ำไปยังแคลมป์มอเตอร์:
R 1 \u003d R 0 * L \u003d 0.329 * 0.08 \u003d 0.026 โอห์ม;
X 1 \u003d X 0 * L \u003d 0.06 * 0.08 \u003d 0.0048 โอห์ม;
ที่ไหน:
R 0 \u003d 0.329 Ohm / km และ X 0 \u003d 0.06 Ohm / km - ค่าของความต้านทานที่ใช้งานและปฏิกิริยาของสายเคเบิลถูกกำหนดตามตารางที่ 2-5 [L2.s 48]
9. กำหนดความต้านทานรวมของสายจากสถานีย่อย 2RP-1 ถึงขั้วมอเตอร์:
ถนน \u003d Rsh + R1 \u003d 0.0114 + 0.026 \u003d 0.0374 โอห์ม;
Xd \u003d Xsh + X1 \u003d 0.0261 + 0.0048 \u003d 0.0309 โอห์ม;
ถ้าอัตราส่วน Rd / Xd = 0.0374 / 0.0309 = 1.21< 2,5. Таким образом, относительная величина ошибки при определении потери напряжения в сети от пускового тока двигателя не превышает 5%.
10. เรากำหนดค่าสัมประสิทธิ์ Ad ตามสูตร [L1, p. 14]:
ที่ไหน:
cosφ = 0.3 และ sinφ = 0.95 ค่าเฉลี่ยของตัวประกอบกำลังเมื่อสตาร์ทเครื่องยนต์ จะถูกนำมาในกรณีที่ไม่มีข้อมูลทางเทคนิค ตาม [L1. กับ. 16].
11. กำหนดแรงดันไฟฟ้าที่ขั้วของเครื่องยนต์ D1 ตามสูตร [L1, p. 14]:
ที่ไหน:
U*sh = Ush/Un = 380/380 =1 - แรงดันสัมพัทธ์บนบัสบาร์ของจุดแจกจ่าย ในหลายกรณี สามารถนำมาเท่ากับ 1;
Iп – กระแสไฟสตาร์ทมอเตอร์;
12. เราตรวจสอบว่าเครื่องยนต์ D1 สามารถใช้กลไกนาโนแรงเหวี่ยงที่แนบมา 1D315-71a ได้หรือไม่:
ที่ไหน:
m p \u003d Mstart / Mnom \u003d 1.2 - หลายหลากของแรงบิดเริ่มต้นของมอเตอร์ไฟฟ้าที่แรงดันไฟฟ้าที่ขั้วของมัน (เลือกตามแคตตาล็อกสำหรับเครื่องยนต์);
12.1 ตัวประกอบภาระถูกกำหนดให้เป็นอัตราส่วนของกำลังไฟฟ้าที่กำหนดที่จำเป็นสำหรับ ดำเนินการตามปกติกลไกในกรณีนี้แรงเหวี่ยง 1D315-71a Rn.meh = 80 กิโลวัตต์ เป็นกำลังมอเตอร์ 90 กิโลวัตต์:
อย่างที่เราทราบกันดีว่าตรงตามเงื่อนไขและเครื่องยนต์เมื่อสตาร์ทเครื่องจะสามารถหมุนปั๊มหอยโข่งที่ติดอยู่กับปั๊มได้ภายใต้สภาวะปกติโดยไม่ทำให้ขดลวดร้อนเกินอุณหภูมิที่อนุญาตตามมาตรฐาน
13. เรากำหนดผลกระทบของการสตาร์ทเครื่องยนต์ D1 ต่อการทำงานของ D2 ประเภท 4A250S2 U3 ที่เชื่อมต่อกับบัส 0.4 kV ค้นหาขนาดของความผันผวนของแรงดันไฟฟ้าบนบัส 0.4 kV โดยใช้สูตร:
13.1 หาค่าสัมประสิทธิ์เถ้าตามสูตร:
14. ในขณะที่สตาร์ทเครื่องยนต์ D1 ที่ขั้วของเครื่องยนต์ที่ทำงานอยู่ D2 แรงดันสัมพัทธ์ตาม [L1, p15] จะลดลงตามขนาดของความผันผวนของแรงดันไฟฟ้า δU*Sh ซึ่งเราได้รับ:
ที่ไหน:
U *D2 \u003d U D2 / Un \u003d 365/380 \u003d 0.96 - แรงดันสัมพัทธ์ที่ขั้วของเครื่องยนต์ D2 ก่อนสตาร์ทเครื่องยนต์ D1
ที่ไหน:
m p \u003d Mmax / Mn \u003d 2.2 - แรงบิดสูงสุดหลายหลาก (เลือกตามแคตตาล็อกสำหรับเครื่องยนต์);
m p.meh - แรงบิดเริ่มต้นหลายหลากที่ต้องการของกลไกขับเคลื่อนถูกเลือกตามตารางที่ 4 [L1, p. 88] สำหรับปั๊มแรงเหวี่ยงคือ 0.3;
15.1 ตัวประกอบภาระถูกกำหนดให้เป็นอัตราส่วนของกำลังระบุที่จำเป็นสำหรับการทำงานปกติของกลไกในกรณีนี้คือตัวกระจายแรงเหวี่ยง 1D200-90a Rn.mekh = 72 กิโลวัตต์ เป็นกำลังมอเตอร์ 75 กิโลวัตต์:
ดังที่เราเห็น ความเสถียรของเครื่องยนต์ D2 ประเภท 1D200-90a นั้นมาพร้อมกับระยะขอบที่มาก
วรรณกรรม:
1. วิธีตรวจสอบความสามารถในการเชื่อมต่อกับ เครือข่ายไฟฟ้ามอเตอร์กรงกระรอก คาร์ปอฟ เอฟ.เอฟ. พ.ศ. 2507
2. การออกแบบโครงข่ายเคเบิลและการเดินสาย Khromchenko G.E. 1980




