มอเตอร์เชิงเส้นคืออะไร มอเตอร์เชิงเส้น
ในเครื่องยนต์ปกติของเรา สันดาปภายในลิงค์เริ่มต้นคือลูกสูบพวกมันกระทำ จากนั้นการเคลื่อนไหวนี้ด้วยกลไกข้อเหวี่ยงจะถูกแปลงเป็นการหมุน ในอุปกรณ์บางตัว ลิงก์แรกและลิงก์สุดท้ายจะดำเนินการในลักษณะเดียวกัน
ตัวอย่างเช่น ในเครื่องกำเนิดไฟฟ้าของเครื่องยนต์ ไม่จำเป็นต้องแปลงการเคลื่อนที่แบบลูกสูบเป็นการหมุนก่อน จากนั้นในเครื่องกำเนิดไฟฟ้า จากสิ่งนี้ การเคลื่อนที่แบบหมุนแยกองค์ประกอบที่เป็นเส้นตรง นั่นคือ ทำการแปลงสองรูปแบบที่ตรงกันข้าม
การพัฒนาเทคโนโลยีการแปลงอิเล็กทรอนิกส์ที่ทันสมัยทำให้สามารถปรับแรงดันเอาต์พุตของเครื่องกำเนิดไฟฟ้าเชิงเส้นตรงสำหรับผู้บริโภค ซึ่งทำให้สามารถสร้างอุปกรณ์ที่ส่วนหนึ่งของวงจรไฟฟ้าปิดไม่ทำการเคลื่อนที่แบบหมุนในสนามแม่เหล็ก แต่หมุนกลับพร้อมกับก้านสูบของเครื่องยนต์สันดาปภายใน ไดอะแกรมที่อธิบายหลักการทำงานของเครื่องกำเนิดแบบดั้งเดิมและเชิงเส้นแสดงในรูปที่ หนึ่ง.
ในเครื่องกำเนิดไฟฟ้าทั่วไป โครงลวดจะใช้เพื่อรับแรงดันไฟฟ้า หมุนในสนามแม่เหล็ก และขับเคลื่อนด้วยอุปกรณ์ขับเคลื่อนภายนอก ในเครื่องกำเนิดที่เสนอ วงลวดจะเคลื่อนที่เป็นเส้นตรงในสนามแม่เหล็ก ความแตกต่างเพียงเล็กน้อยและไม่มีหลักการนี้ทำให้สามารถลดความซับซ้อนและลดค่าใช้จ่ายของผู้เสนอญัตติได้อย่างมาก หากใช้เครื่องยนต์สันดาปภายในเป็นส่วนประกอบ
นอกจากนี้ในคอมเพรสเซอร์แบบลูกสูบที่ขับเคลื่อนด้วย เครื่องยนต์ลูกสูบ, ลิงค์อินพุตและเอาต์พุตทำงาน , รูปที่ 2.
ข้อดีของลิเนียร์มอเตอร์
ขนาดเล็กและน้ำหนักเนื่องจากไม่มีกลไกข้อเหวี่ยง MTBF สูงเนื่องจากไม่มีกลไกข้อเหวี่ยงและเนื่องจากการมีโหลดตามยาวเท่านั้น ราคาถูกเนื่องจากขาดกลไกข้อเหวี่ยง ความสามารถในการผลิต - สำหรับการผลิตชิ้นส่วน จำเป็นต้องใช้เฉพาะการดำเนินการที่ใช้แรงงานมาก การกลึงและการกัดเท่านั้น ความสามารถในการเปลี่ยนไปใช้เชื้อเพลิงชนิดอื่นโดยไม่ต้องดับเครื่องยนต์
การควบคุมการจุดระเบิดโดยใช้แรงดันขณะบีบอัดส่วนผสมการทำงาน
สำหรับเครื่องยนต์ทั่วไปที่จะจ่ายแรงดันไฟฟ้า (กระแส) ให้กับหัวเทียน ต้องปฏิบัติตามสองเงื่อนไข:
เงื่อนไขแรกถูกกำหนดโดยจลนศาสตร์ของกลไกข้อเหวี่ยง - ลูกสูบต้องอยู่ที่จุดศูนย์กลางตายบน (ไม่สนใจจังหวะการจุดระเบิด)
เงื่อนไขที่สองถูกกำหนดโดยวัฏจักรอุณหพลศาสตร์ - ความดันในห้องเผาไหม้ก่อนรอบการทำงานจะต้องสอดคล้องกับเชื้อเพลิงที่ใช้
เป็นการยากมากที่จะปฏิบัติตามเงื่อนไขทั้งสองอย่างพร้อมกัน เมื่ออากาศหรือส่วนผสมที่ใช้งานถูกอัด ก๊าซอัดจะรั่วในห้องเผาไหม้ผ่านวงแหวนลูกสูบ ฯลฯ ยิ่งการบีบอัดช้าลง (เพลามอเตอร์หมุนช้าลง) การรั่วไหลก็จะยิ่งสูงขึ้น ในกรณีนี้ ความดันในห้องเผาไหม้ก่อนรอบการทำงานจะน้อยกว่าค่าที่เหมาะสมและรอบการทำงานจะเกิดขึ้นภายใต้สภาวะที่ไม่เหมาะสม ค่าสัมประสิทธิ์ การกระทำที่เป็นประโยชน์เครื่องยนต์ลดลง กล่าวคือสามารถรับประกันได้ว่าเครื่องยนต์จะมีประสิทธิภาพสูงเฉพาะในช่วงความเร็วรอบการหมุนของเพลาส่งออกที่แคบเท่านั้น
ตัวอย่างเช่น ประสิทธิภาพของเครื่องยนต์บนขาตั้งประมาณ 40% และใน เงื่อนไขที่แท้จริง, โดยรถยนต์, กับ โหมดต่างๆการเคลื่อนไหวค่านี้ลดลงถึง 10 ... 12%
ในมอเตอร์แนวราบไม่มีกลไกข้อเหวี่ยง ดังนั้นจึงไม่จำเป็นต้องปฏิบัติตามเงื่อนไขแรก ไม่สำคัญว่าลูกสูบจะอยู่ที่ตำแหน่งใดก่อนรอบการทำงาน เฉพาะแรงดันแก๊สในห้องเผาไหม้ก่อนรอบการทำงานเท่านั้นที่มีความสำคัญ ดังนั้นหากการจ่ายแรงดันไฟ (กระแส) ให้กับหัวเทียนไม่ได้ถูกควบคุมโดยตำแหน่งของลูกสูบ แต่โดยแรงดันในห้องเผาไหม้ รอบการทำงาน (การจุดระเบิด) จะเริ่มที่ ความดันที่เหมาะสมโดยไม่คำนึงถึงความถี่ของเครื่องยนต์ มะเดื่อ. 3.
ดังนั้นในโหมดการทำงานใดๆ ของลิเนียร์มอเตอร์ เราจะมีพื้นที่วนรอบสูงสุดของวงจรคาร์โนต์เทอร์โมไดนามิกตามลำดับ และมีประสิทธิภาพสูงภายใต้โหมดการทำงานที่แตกต่างกันของมอเตอร์
การควบคุมการจุดระเบิดด้วยแรงดันในห้องเผาไหม้ยังทำให้สามารถสลับไปใช้เชื้อเพลิงประเภทอื่นได้อย่าง "ไม่ลำบาก" ตัวอย่างเช่น เมื่อเปลี่ยนจากเชื้อเพลิงออกเทนสูงไปเป็นเชื้อเพลิงออกเทนต่ำ ในเครื่องยนต์เชิงเส้นตรง จำเป็นต้องสั่งระบบจุดระเบิดให้จ่ายแรงดันไฟฟ้า (กระแส) ให้กับหัวเทียนที่แรงดันต่ำเท่านั้น ในเครื่องยนต์ทั่วไป สำหรับสิ่งนี้ จำเป็นต้องเปลี่ยนมิติทางเรขาคณิตของลูกสูบหรือกระบอกสูบ
สามารถใช้การควบคุมการจุดระเบิดด้วยแรงดันในกระบอกสูบโดยใช้วิธีการวัดแรงดันแบบเพียโซอิเล็กทริกหรือคาปาซิทีฟ
เซ็นเซอร์ความดันทำขึ้นในรูปของแหวนรองซึ่งอยู่ใต้น็อตสตั๊ดของฝาสูบ รูปที่ 3. แรงดันแก๊สในห้องอัดทำหน้าที่กับเซ็นเซอร์ความดันซึ่งอยู่ใต้น็อตหัวถัง และข้อมูลเกี่ยวกับความดันในห้องอัดจะถูกส่งไปยังชุดควบคุมจังหวะการจุดระเบิด ด้วยแรงดันในห้องที่สอดคล้องกับแรงดันจุดระเบิด ให้เชื้อเพลิง, อุปกรณ์ระบบจุดระเบิด แรงดันไฟฟ้า(กระแสไฟ) ต่อหัวเทียน ด้วยแรงดันที่เพิ่มขึ้นอย่างรวดเร็วซึ่งสอดคล้องกับการเริ่มต้นของวงจรการทำงาน ระบบจุดระเบิดจะขจัดแรงดันไฟฟ้า (กระแส) ออกจาก หากไม่มีแรงดันเพิ่มขึ้นหลังจากเวลาที่กำหนดซึ่งสอดคล้องกับการสตาร์ทรอบการทำงานที่ไม่มีการสตาร์ท ระบบจุดระเบิดจะส่งสัญญาณควบคุมเพื่อสตาร์ทเครื่องยนต์ นอกจากนี้ สัญญาณเอาท์พุตของเซ็นเซอร์แรงดันกระบอกสูบยังใช้เพื่อกำหนดความถี่ของเครื่องยนต์และการวินิจฉัย (การตรวจจับแรงอัด ฯลฯ)
แรงอัดเป็นสัดส่วนโดยตรงกับความดันในห้องเผาไหม้ หลังจากที่แรงดันในแต่ละกระบอกสูบตรงข้ามไม่น้อยกว่าที่กำหนด (ขึ้นอยู่กับชนิดของเชื้อเพลิงที่ใช้) ระบบควบคุมจะสั่งให้จุดไฟส่วนผสมที่ติดไฟได้ หากจำเป็นต้องเปลี่ยนไปใช้เชื้อเพลิงประเภทอื่น ค่าของแรงดันที่ตั้งไว้ (ค่าอ้างอิง) จะเปลี่ยนไป
นอกจากนี้ สามารถปรับจังหวะเวลาการจุดระเบิดของส่วนผสมที่ติดไฟได้โดยอัตโนมัติ เช่นเดียวกับในเครื่องยนต์ทั่วไป ไมโครโฟนวางอยู่บนกระบอกสูบ - เซ็นเซอร์น็อค ไมโครโฟนจะแปลงการสั่นสะเทือนของเสียงทางกลของตัวกระบอกเป็นสัญญาณไฟฟ้า ตัวกรองดิจิตอลแยกฮาร์มอนิก (คลื่นไซน์) ที่สอดคล้องกับโหมดการระเบิดจากชุดของผลรวมของไซนัสแรงดันไฟฟ้าชุดนี้ เมื่อมีสัญญาณปรากฏขึ้นที่เอาต์พุตของตัวกรองซึ่งสอดคล้องกับลักษณะการระเบิดในเครื่องยนต์ ระบบควบคุมจะลดค่าของสัญญาณอ้างอิงซึ่งสอดคล้องกับแรงดันจุดระเบิดของส่วนผสมที่ติดไฟได้ หากไม่มีสัญญาณที่สัมพันธ์กับการระเบิด หลังจากนั้นครู่หนึ่ง ระบบควบคุมจะเพิ่มค่าของสัญญาณอ้างอิง ซึ่งสอดคล้องกับแรงดันจุดติดไฟของส่วนผสมที่ติดไฟได้ จนกว่าความถี่ที่เกิดก่อนการระเบิดจะปรากฏขึ้น อีกครั้ง เมื่อความถี่ก่อนการน็อคเกิดขึ้น ระบบจะลดการอ้างอิงซึ่งสอดคล้องกับความดันการจุดระเบิดที่ลดลง ไปสู่การจุดระเบิดแบบไม่มีน็อค ดังนั้นระบบจุดระเบิดจึงปรับให้เข้ากับประเภทของเชื้อเพลิงที่ใช้
หลักการทำงานของลิเนียร์มอเตอร์
หลักการทำงานของเชิงเส้นตรงเช่นเดียวกับเครื่องยนต์สันดาปภายในทั่วไปนั้นขึ้นอยู่กับผลกระทบ การขยายตัวทางความร้อนก๊าซที่เกิดขึ้นระหว่างการเผาไหม้ ส่วนผสมของเชื้อเพลิงและอากาศและให้การเคลื่อนที่ของลูกสูบในกระบอกสูบ ก้านสูบส่งการเคลื่อนที่แบบลูกสูบเป็นเส้นตรงของลูกสูบไปยังเครื่องกำเนิดไฟฟ้าเชิงเส้นหรือคอมเพรสเซอร์แบบลูกสูบ
ข้าว. 4 ประกอบด้วยลูกสูบสองคู่ที่ทำงานในแอนติเฟส ซึ่งทำให้สามารถปรับสมดุลของเครื่องยนต์ได้ ลูกสูบแต่ละคู่เชื่อมต่อกันด้วยก้านสูบ ก้านสูบถูกแขวนไว้บนตลับลูกปืนเชิงเส้นและสามารถแกว่งได้อย่างอิสระพร้อมกับลูกสูบในตัวเรือนเครื่องกำเนิดไฟฟ้า ลูกสูบวางอยู่ในกระบอกสูบของเครื่องยนต์สันดาปภายใน กระบอกสูบจะถูกขับออกทางหน้าต่างล้าง ภายใต้การกระทำของแรงดันเกินเล็กน้อยที่สร้างขึ้นในห้องเตรียมทางเข้า บนก้านสูบคือส่วนที่เคลื่อนที่ได้ของวงจรแม่เหล็กของเครื่องกำเนิดไฟฟ้า ขดลวดกระตุ้นจะสร้างฟลักซ์แม่เหล็กที่จำเป็นต่อการสร้างกระแสไฟฟ้า ด้วยการเคลื่อนที่แบบลูกสูบของก้านสูบและด้วยเป็นส่วนหนึ่งของวงจรแม่เหล็ก เส้นของการเหนี่ยวนำแม่เหล็กที่สร้างขึ้นโดยขดลวดกระตุ้นจะตัดผ่านขดลวดพลังงานที่อยู่กับที่ของเครื่องกำเนิดไฟฟ้า ทำให้เกิดแรงดันไฟฟ้าและกระแสในนั้น (ด้วยการปิด วงจรไฟฟ้า).
|
|
| ข้าว. สี่. . |
คอมเพรสเซอร์เชิงเส้น, รูปที่. 5 ประกอบด้วยลูกสูบสองคู่ที่ทำงานในแอนติเฟส ซึ่งทำให้สามารถปรับสมดุลของเครื่องยนต์ได้ ลูกสูบแต่ละคู่เชื่อมต่อกันด้วยก้านสูบ ก้านสูบถูกแขวนไว้บนตลับลูกปืนเชิงเส้นและสามารถแกว่งได้อย่างอิสระกับลูกสูบในตัวเรือน ลูกสูบวางอยู่ในกระบอกสูบของเครื่องยนต์สันดาปภายใน กระบอกสูบจะถูกขับออกทางหน้าต่างล้าง ภายใต้การกระทำของแรงดันเกินเล็กน้อยที่สร้างขึ้นในห้องเตรียมทางเข้า ด้วยการเคลื่อนที่แบบลูกสูบของก้านสูบและลูกสูบของคอมเพรสเซอร์ อากาศภายใต้แรงดันจะถูกส่งไปยังตัวรับคอมเพรสเซอร์
|
|
| ข้าว. 5. คอมเพรสเซอร์เชิงเส้น |
รอบการทำงานในเครื่องยนต์ดำเนินการในสองรอบ
2. จังหวะจังหวะ. เมื่อลูกสูบอยู่ใกล้จุดศูนย์กลางตายบน ให้บีบอัด ส่วนผสมการทำงานจุดประกายด้วยไฟฟ้าจากเทียนซึ่งเป็นผลมาจากอุณหภูมิและความดันของก๊าซเพิ่มขึ้นอย่างรวดเร็ว ภายใต้อิทธิพลของการขยายตัวทางความร้อนของก๊าซ ลูกสูบจะเคลื่อนที่ไปที่ ตายล่างจุดในขณะที่ก๊าซขยายตัวทำให้ งานที่มีประโยชน์. ในขณะเดียวกัน ลูกสูบก็สร้าง ความดันสูงในห้องทางเข้า ภายใต้แรงดัน วาล์วจะปิด จึงป้องกันไม่ให้อากาศเข้าสู่ท่อร่วมไอดี
ระบบระบายอากาศ
ระหว่างจังหวะการทำงานในกระบอกสูบ รูปที่ 6 จังหวะการทำงาน ลูกสูบภายใต้การกระทำของความดันในห้องเผาไหม้จะเคลื่อนที่ไปในทิศทางที่ระบุโดยลูกศร ภายใต้การกระทำของแรงดันเกินในห้องเตรียมแรงดัน วาล์วจะปิด และที่นี่อากาศจะถูกอัดเพื่อระบายอากาศในกระบอกสูบ เมื่อลูกสูบ (วงแหวนอัด) ไปถึงหน้าต่างล้าง, รูปที่. 6 การระบายอากาศ ความดันในห้องเผาไหม้ลดลงอย่างรวดเร็ว จากนั้นลูกสูบที่มีก้านสูบจะเคลื่อนที่ด้วยความเฉื่อย นั่นคือ มวลของส่วนที่เคลื่อนที่ของเครื่องกำเนิดไฟฟ้าจะทำหน้าที่เป็นมู่เล่ในเครื่องยนต์ทั่วไป ในเวลาเดียวกัน หน้าต่างไล่อากาศจะเปิดออกโดยสมบูรณ์และอากาศอัดในห้องเตรียมทางเข้าออก ภายใต้อิทธิพลของความแตกต่างของแรงดัน (ความดันในห้องเตรียมทางเข้าและความดันบรรยากาศ) จะล้างกระบอกสูบ นอกจากนี้ ในระหว่างรอบการทำงานในกระบอกสูบฝั่งตรงข้าม วงจรการอัดจะดำเนินการ
เมื่อลูกสูบเคลื่อนที่ในโหมดการบีบอัด รูปที่ 6 การบีบอัด, หน้าต่างล้างถูกปิดโดยลูกสูบ, เชื้อเพลิงเหลวถูกฉีด, ในขณะนี้อากาศในห้องเผาไหม้อยู่ภายใต้แรงดันเกินเล็กน้อยที่จุดเริ่มต้นของรอบการอัด ด้วยการบีบอัดเพิ่มเติม ทันทีที่ความดันของของผสมที่ติดไฟได้ซึ่งอัดได้นั้นมีค่าเท่ากับค่าอ้างอิง (ที่กำหนดไว้สำหรับเชื้อเพลิงชนิดใดชนิดหนึ่ง) แรงดันไฟฟ้าจะถูกนำไปใช้กับอิเล็กโทรดหัวเทียน ของผสมจะจุดประกายวัฏจักรการทำงาน จะเริ่มขึ้นและกระบวนการจะทำซ้ำ ในกรณีนี้ เครื่องยนต์สันดาปภายในประกอบด้วยกระบอกสูบและลูกสูบแบบโคแอกเซียลที่วางอยู่ตรงข้ามกันเพียงสองกระบอกที่เชื่อมต่อกันทางกลไก
ปั๊มน้ำมันเชื้อเพลิง
หน่วยไดรฟ์ ปั๊มน้ำมันเชื้อเพลิงเครื่องกำเนิดไฟฟ้าเชิงเส้น คือพื้นผิวลูกเบี้ยวประกบระหว่างลูกกลิ้งลูกสูบของปั๊มและลูกกลิ้งตัวเรือนปั๊ม รูปที่ 7. พื้นผิวลูกเบี้ยวตอบสนองกับก้านสูบเครื่องยนต์สันดาปภายใน และผลักลูกสูบและลูกกลิ้งปั๊มออกจากกันในแต่ละจังหวะ ในขณะที่ลูกสูบปั๊มเคลื่อนที่สัมพันธ์กับกระบอกสูบของปั๊ม และส่วนหนึ่งของเชื้อเพลิงถูกผลักออกไปยังหัวฉีดเชื้อเพลิง ที่จุดเริ่มต้นของวงจรการบีบอัด หากจำเป็นต้องเปลี่ยนปริมาณเชื้อเพลิงที่ขับออกมาต่อรอบ พื้นผิวลูกเบี้ยวจะหมุนสัมพันธ์กับแกนตามยาว เมื่อพื้นผิวลูกเบี้ยวหมุนสัมพันธ์กับแกนตามยาว ลูกกลิ้งลูกสูบของปั๊มและลูกกลิ้งตัวเรือนปั๊มจะเคลื่อนออกจากกันหรือเปลี่ยน (ขึ้นอยู่กับทิศทางของการหมุน) ในระยะทางที่ต่างกัน จังหวะลูกสูบของปั๊มเชื้อเพลิงจะเปลี่ยนไปและส่วนของ เชื้อเพลิงที่ขับออกมาจะเปลี่ยน การหมุนของลูกเบี้ยวลูกสูบรอบแกนนั้นดำเนินการโดยใช้เพลาคงที่ ซึ่งประกอบกับลูกเบี้ยวผ่านตลับลูกปืนเชิงเส้น ดังนั้นลูกเบี้ยวจะเคลื่อนที่ไปมาในขณะที่เพลายังคงนิ่งอยู่ เมื่อเพลาหมุนรอบแกน พื้นผิวลูกเบี้ยวจะหมุนรอบแกนและระยะชักของปั๊มเชื้อเพลิงจะเปลี่ยนไป เพลาสำหรับเปลี่ยนส่วนการฉีดน้ำมันเชื้อเพลิงนั้นขับเคลื่อนด้วยสเต็ปเปอร์มอเตอร์หรือแบบแมนนวล
ไดรฟ์ของปั๊มเชื้อเพลิงของคอมเพรสเซอร์เชิงเส้นยังเป็นพื้นผิวลูกเบี้ยวที่ประกบระหว่างระนาบของลูกสูบปั๊มและระนาบของตัวเรือนปั๊ม, รูปที่ 8. พื้นผิวลูกเบี้ยวทำการเคลื่อนที่แบบหมุนลูกสูบร่วมกับเพลาของเฟืองซิงโครไนซ์ของเครื่องยนต์สันดาปภายใน และดันระนาบของลูกสูบและปั๊มในแต่ละจังหวะ ในขณะที่ลูกสูบของปั๊มจะเคลื่อนที่สัมพันธ์กับกระบอกสูบของปั๊มและส่วนหนึ่ง ของเชื้อเพลิงถูกขับไปที่หัวฉีดน้ำมันเชื้อเพลิงที่จุดเริ่มต้นของรอบการอัด เมื่อใช้งานคอมเพรสเซอร์เชิงเส้นตรง ไม่จำเป็นต้องเปลี่ยนปริมาณเชื้อเพลิงที่จ่ายออกไป การทำงานของคอมเพรสเซอร์เชิงเส้นตรงมีนัยเฉพาะควบคู่กับเครื่องรับ ซึ่งเป็นอุปกรณ์เก็บพลังงานที่สามารถปรับยอดให้เรียบได้ โหลดสูงสุด. ดังนั้นจึงแนะนำให้นำมอเตอร์คอมเพรสเซอร์เชิงเส้นตรงมาไว้เพียงสองโหมดเท่านั้น: โหมดโหลดที่เหมาะสมที่สุดและ ไม่ได้ใช้งาน. การสลับระหว่างสองโหมดนี้ดำเนินการโดยใช้วาล์วแม่เหล็กไฟฟ้าซึ่งเป็นระบบควบคุม
เปิดตัวระบบ
ระบบสตาร์ทของลิเนียร์มอเตอร์ดำเนินการเช่นเดียวกับในมอเตอร์ทั่วไป โดยใช้ไดรฟ์ไฟฟ้าและอุปกรณ์กักเก็บพลังงาน เครื่องยนต์ทั่วไปเริ่มต้นด้วยสตาร์ทเตอร์ (ไดรฟ์ไฟฟ้า) และมู่เล่ (ที่เก็บพลังงาน) มอเตอร์เชิงเส้นเริ่มต้นโดยใช้คอมเพรสเซอร์ไฟฟ้าเชิงเส้นและตัวรับสัญญาณเริ่มต้น รูปที่ 9.
|
|
| ข้าว. 9. ระบบสตาร์ท |

เมื่อสตาร์ท ลูกสูบของคอมเพรสเซอร์สตาร์ท เมื่อมีการจ่ายไฟ จะเคลื่อนที่ไปเรื่อย ๆ เนื่องจากสนามแม่เหล็กไฟฟ้าของขดลวด จากนั้นจะกลับสู่สถานะเดิมด้วยสปริง หลังจากที่เครื่องรับถูกสูบถึง 8 ... 12 บรรยากาศ พลังงานจะถูกลบออกจากขั้วของคอมเพรสเซอร์สตาร์ทและเครื่องยนต์ก็พร้อมที่จะสตาร์ท เริ่มต้นทำได้โดยการสมัคร อัดอากาศเข้าไปในช่องทางเข้าล่วงหน้าของลิเนียร์มอเตอร์ การจ่ายอากาศจะดำเนินการโดยใช้โซลินอยด์วาล์วซึ่งควบคุมการทำงานโดยระบบควบคุม เนื่องจากระบบควบคุมไม่มีข้อมูลเกี่ยวกับตำแหน่งของก้านสูบของเครื่องยนต์ก่อนสตาร์ท จากนั้นจึงส่งแรงดันอากาศสูงไปยังห้องพรีสตาร์ต เช่น กระบอกสูบด้านนอก ลูกสูบจึงรับประกันว่าจะเคลื่อนเข้าสู่สถานะเดิมก่อน สตาร์ทเครื่องยนต์ จากนั้นแรงดันอากาศสูงจะถูกส่งไปยังช่องทางเข้าล่วงหน้าของกระบอกสูบกลาง ดังนั้นกระบอกสูบจะถูกระบายอากาศก่อนสตาร์ท หลังจากนั้นแรงดันอากาศสูงจะถูกส่งไปยังห้องเตรียมสตาร์ทของกระบอกสูบด้านนอกอีกครั้งเพื่อสตาร์ทเครื่องยนต์ ทันทีที่รอบการทำงานเริ่มต้น (เซ็นเซอร์ความดันจะแสดงแรงดันสูงในห้องเผาไหม้ที่สอดคล้องกับรอบการทำงาน) ระบบควบคุมที่ใช้โซลินอยด์วาล์วจะหยุดการจ่ายอากาศจากเครื่องรับเริ่มต้น
ระบบซิงโครไนซ์
การซิงโครไนซ์การทำงานของก้านสูบของมอเตอร์เชิงเส้นนั้นดำเนินการโดยใช้เฟืองซิงโครไนซ์และชั้นวางเกียร์คู่รูปที่ 10 ติดอยู่กับส่วนที่เคลื่อนที่ของวงจรแม่เหล็กของเครื่องกำเนิดไฟฟ้าหรือลูกสูบคอมเพรสเซอร์ เกียร์ฟันยังเป็นไดรฟ์ ปั้มน้ำมันด้วยความช่วยเหลือของการบังคับหล่อลื่นโหนดของชิ้นส่วนที่ถูของมอเตอร์เชิงเส้น
การลดมวลของวงจรแม่เหล็กและวงจรสำหรับการเปิดขดลวดของเครื่องกำเนิดไฟฟ้า
เครื่องกำเนิดไฟฟ้าของเครื่องกำเนิดก๊าซเชิงเส้นเป็นเครื่องไฟฟ้าแบบซิงโครนัส ในเครื่องกำเนิดไฟฟ้าทั่วไป โรเตอร์จะหมุน และมวลของส่วนที่เคลื่อนที่ของวงจรแม่เหล็กนั้นไม่สำคัญ ในเครื่องกำเนิดไฟฟ้าเชิงเส้น ส่วนที่เคลื่อนที่ได้ของวงจรแม่เหล็กจะตอบสนองร่วมกับก้านสูบของเครื่องยนต์สันดาปภายใน และส่วนที่เคลื่อนที่ได้ของวงจรแม่เหล็กที่มีมวลสูงทำให้การทำงานของเครื่องกำเนิดไฟฟ้าเป็นไปไม่ได้ จำเป็นต้องหาวิธีลดมวลของส่วนที่เคลื่อนที่ของวงจรแม่เหล็กของเครื่องกำเนิด
|
|
| ข้าว. 11. เครื่องกำเนิดไฟฟ้า |
เพื่อลดมวลของส่วนที่เคลื่อนที่ของวงจรแม่เหล็ก จำเป็นต้องลดขนาดเรขาคณิตตามลำดับ ปริมาตรและมวลจะลดลง ดังภาพที่ 11 แต่จากนั้นฟลักซ์แม่เหล็กจะตัดผ่านเฉพาะขดลวดในหน้าต่างคู่เดียวแทน เท่ากับ 5 ฟลักซ์แม่เหล็กที่ตัดผ่านตัวนำสั้นลง 5 เท่า ตามลำดับ และแรงดันไฟขาออก (กำลัง) จะลดลง 5 เท่า เพื่อชดเชยการลดลงของแรงดันไฟของเครื่องกำเนิดไฟฟ้า จำเป็นต้องเพิ่มจำนวนรอบในหนึ่งหน้าต่าง เพื่อให้ความยาวของตัวนำขดลวดไฟฟ้าเท่ากับในรุ่นดั้งเดิมของเครื่องกำเนิดไฟฟ้า รูปที่ 11
แต่เพื่อให้จำนวนรอบมากขึ้นที่จะนอนในหน้าต่างโดยไม่มีการเปลี่ยนแปลง มิติทางเรขาคณิตจำเป็นต้องลดส่วนตัดขวางของตัวนำ
ด้วยโหลดคงที่และแรงดันเอาต์พุต โหลดความร้อนสำหรับตัวนำดังกล่าว ในกรณีนี้จะเพิ่มขึ้นและกลายเป็นมากกว่าที่เหมาะสม (กระแสยังคงเท่าเดิมและส่วนตัดขวางของตัวนำลดลงเกือบ 5 เท่า) ในกรณีนี้จะเป็นกรณีที่ขดลวดของหน้าต่างเชื่อมต่อเป็นอนุกรม กล่าวคือ เมื่อกระแสโหลดไหลผ่านขดลวดทั้งหมดพร้อมกัน เช่นเดียวกับในเครื่องกำเนิดไฟฟ้าทั่วไป แต่ถ้าเพียงคดเคี้ยวของหน้าต่างคู่หนึ่งเชื่อมต่อกับโหลดซึ่งใน ช่วงเวลานี้ข้ามฟลักซ์แม่เหล็กจากนั้นขดลวดในช่วงเวลาสั้น ๆ นี้จะไม่มีเวลาทำให้ร้อนมากเกินไปเนื่องจากกระบวนการทางความร้อนนั้นเฉื่อย นั่นคือจำเป็นต้องเชื่อมต่อกับโหลดเฉพาะส่วนที่เป็นขดลวดของเครื่องกำเนิดไฟฟ้า (เสาคู่) ที่ฟลักซ์แม่เหล็กตัดผ่าน ส่วนที่เหลือของเวลาควรเย็นลง ดังนั้นโหลดจะเชื่อมต่อเป็นอนุกรมเสมอโดยมีเครื่องกำเนิดไฟฟ้าเพียงขดลวดเดียว ในกรณีนี้ ค่าประสิทธิผลของกระแสที่ไหลผ่านขดลวดของเครื่องกำเนิดไฟฟ้าจะไม่เกินค่าที่เหมาะสมที่สุดจากมุมมองของการให้ความร้อนแก่ตัวนำ ดังนั้นจึงเป็นไปได้ที่จะลดมวลมากกว่า 10 เท่าอย่างมีนัยสำคัญไม่เพียง แต่ส่วนที่เคลื่อนที่ของวงจรแม่เหล็กของเครื่องกำเนิด แต่ยังรวมถึงมวลของส่วนคงที่ของวงจรแม่เหล็กด้วย ขดลวดถูกสลับโดยใช้ กุญแจอิเล็กทรอนิกส์. ในฐานะกุญแจสำหรับการเชื่อมต่อขดลวดของเครื่องกำเนิดไฟฟ้ากับโหลดสลับกันจะใช้อุปกรณ์เซมิคอนดักเตอร์ - ไทริสเตอร์ (triacs) เครื่องกำเนิดเชิงเส้นคือเครื่องกำเนิดแบบขยายทั่วไป รูปที่ 11. ตัวอย่างเช่น ด้วยความถี่ที่สอดคล้องกับ 3000 รอบ/นาที และจังหวะของก้านสูบ 6 ซม. ขดลวดแต่ละอันจะร้อนขึ้นเป็นเวลา 0.00083 วินาที โดยปัจจุบันสูงกว่ากระแสที่กำหนด 12 เท่า ช่วงเวลาที่เหลือ - เกือบ 0.01 วินาที ขดลวดนี้จะเย็นลง เมื่อความถี่ในการทำงานลดลง เวลาทำความร้อนจะเพิ่มขึ้น แต่กระแสที่ไหลผ่านขดลวดและผ่านโหลดจะลดลงตามลำดับ Triac คือสวิตช์ (สามารถปิดหรือเปิดวงจรไฟฟ้าได้) การปิดและเปิดเกิดขึ้นโดยอัตโนมัติ ระหว่างการทำงาน ทันทีที่ฟลักซ์แม่เหล็กเริ่มตัดผ่านการหมุนของขดลวด แรงดันไฟฟ้าเหนี่ยวนำจะปรากฏขึ้นที่ปลายขดลวด ซึ่งจะนำไปสู่การปิดวงจรไฟฟ้า (การเปิดไตรแอก) จากนั้น เมื่อฟลักซ์แม่เหล็กตัดผ่านการหมุนของขดลวดถัดไป แรงดันไฟตกคร่อมอิเล็กโทรดไตรแอกจะนำไปสู่การเปิดวงจรไฟฟ้า ดังนั้นในช่วงเวลาใด ๆ โหลดจะถูกเปิดตลอดเวลาเป็นอนุกรมโดยมีเครื่องกำเนิดไฟฟ้าเพียงขดลวดเดียว
ในรูป 12 แสดงภาพวาดการประกอบเครื่องกำเนิดไฟฟ้าที่ไม่มีขดลวดสนาม
ลิเนียร์มอเตอร์ส่วนใหญ่เกิดจากพื้นผิวของการปฏิวัติ กล่าวคือ มีรูปทรงกระบอก ทำให้สามารถผลิตได้โดยใช้กระบวนการกลึงอัตโนมัติที่ถูกที่สุด
|
|
| ข้าว. 12. การวาดภาพประกอบของเครื่องกำเนิดไฟฟ้า |
แบบจำลองทางคณิตศาสตร์ของมอเตอร์เชิงเส้น
แบบจำลองทางคณิตศาสตร์ของเครื่องกำเนิดเชิงเส้นเป็นไปตามกฎการอนุรักษ์พลังงานและกฎของนิวตัน: ในแต่ละช่วงเวลา ที่ t0 และ t1 แรงที่กระทำต่อลูกสูบจะต้องเท่ากัน หลังจากช่วงเวลาสั้น ๆ ภายใต้การกระทำของแรงที่เกิดขึ้น ลูกสูบจะเคลื่อนที่ไปในระยะทางหนึ่ง ในส่วนสั้นๆ นี้ เราคิดว่าลูกสูบเคลื่อนที่อย่างสม่ำเสมอ ค่าของแรงทั้งหมดจะเปลี่ยนไปตามกฏของฟิสิกส์และคำนวณโดยใช้สูตรที่รู้จักกันดี
[คู่มือฟิสิกส์: Kuchling H. Per. กับเขา. ฉบับที่ 2 - M.: Mir, 1985. - 520 p., ill.]. ข้อมูลทั้งหมดจะถูกป้อนลงในตารางโดยอัตโนมัติ เช่น ใน Excel หลังจากนั้น t0 จะได้รับการกำหนดค่าของ t1 และวงจรจะวนซ้ำ นั่นคือเราดำเนินการกับลอการิทึม
แบบจำลองทางคณิตศาสตร์คือตาราง ตัวอย่างเช่น ในโปรแกรม Excel และการวาดภาพประกอบ (สเก็ตช์) ของเครื่องกำเนิดไฟฟ้า แบบร่างไม่มีมิติเชิงเส้น แต่เป็นพิกัดของเซลล์ตารางใน Excel ขนาดเชิงเส้นโดยประมาณที่สอดคล้องกันจะถูกป้อนลงในตาราง และโปรแกรมจะคำนวณและวางแผนกราฟการเคลื่อนที่ของลูกสูบในเครื่องกำเนิดเสมือน นั่นคือโดยการแทนที่ขนาด: เส้นผ่านศูนย์กลางลูกสูบ, ปริมาตรของห้องเตรียมทางเข้า, จังหวะลูกสูบไปยังหน้าต่างไล่ออก ฯลฯ เราจะได้กราฟของระยะทางที่เคลื่อนที่ ความเร็ว และความเร่งของการเคลื่อนที่ของลูกสูบเทียบกับเวลา ทำให้สามารถคำนวณตัวเลือกนับร้อยและเลือกตัวเลือกที่ดีที่สุดได้อย่างแท้จริง
รูปร่างของสายไฟที่คดเคี้ยวของเครื่องกำเนิดไฟฟ้า
ชั้นของสายไฟของหน้าต่างเดียวของเครื่องกำเนิดเชิงเส้นซึ่งแตกต่างจากเครื่องกำเนิดทั่วไปอยู่ในระนาบเดียวบิดเป็นเกลียวดังนั้นจึงง่ายกว่าที่จะไขม้วนด้วยสายไฟที่ไม่ใช่ส่วนตัดเป็นวงกลม แต่เป็นสี่เหลี่ยม คือ ขดเป็นแผ่นทองแดงบิดเป็นเกลียว ทำให้สามารถเพิ่มปัจจัยการเติมหน้าต่างรวมทั้งเพิ่มความแข็งแรงทางกลของขดลวดได้อย่างมาก โปรดทราบว่าความเร็วของแกนต่อและด้วยเหตุนี้ส่วนที่เคลื่อนที่ของวงจรแม่เหล็กจึงไม่เท่ากัน ซึ่งหมายความว่าเส้นของการเหนี่ยวนำแม่เหล็กตัดผ่านขดลวดของหน้าต่างต่างๆ ด้วย ความเร็วต่างกัน. สำหรับ ใช้งานเต็มที่ลวดคดเคี้ยว จำนวนรอบของแต่ละหน้าต่างจะต้องสอดคล้องกับความเร็วของฟลักซ์แม่เหล็กที่อยู่ใกล้หน้าต่างนี้ (ความเร็วของก้านสูบ) จำนวนรอบของขดลวดของแต่ละหน้าต่างจะถูกเลือกโดยคำนึงถึงความเร็วของก้านสูบต่อระยะทางที่ก้านสูบเดินทาง
นอกจากนี้ สำหรับแรงดันไฟฟ้าที่สม่ำเสมอมากขึ้นของกระแสที่สร้างขึ้น คุณสามารถไขม้วนของหน้าต่างแต่ละบานด้วยแผ่นทองแดงที่มีความหนาต่างกันได้ ในบริเวณที่ความเร็วของก้านสูบไม่สูง จะทำการพันด้วยแผ่นที่มีความหนาน้อยกว่า จำนวนรอบที่มากขึ้นจะพอดีกับหน้าต่างและด้วย ความเร็วต่ำก้านสูบในส่วนนี้ เครื่องกำเนิดไฟฟ้าจะผลิตแรงดันไฟฟ้าที่เทียบเท่ากับแรงดันไฟฟ้าของกระแสไฟฟ้าในส่วน "ความเร็วสูง" มากกว่า แม้ว่ากระแสที่สร้างขึ้นจะต่ำกว่ามาก
การประยุกต์ใช้เครื่องกำเนิดไฟฟ้าเชิงเส้น
แอปพลิเคชั่นหลักของเครื่องกำเนิดที่อธิบายไว้คือแหล่งที่มา เครื่องสำรองไฟที่สถานประกอบการที่มีความจุขนาดเล็ก ให้อุปกรณ์เชื่อมต่อ เวลานานทำงานเมื่อแรงดันไฟหลักล้มเหลวหรือเมื่อพารามิเตอร์เกิน บรรทัดฐานที่อนุญาต. เครื่องกำเนิดไฟฟ้าสามารถใช้เพื่อให้พลังงานไฟฟ้าแก่อุปกรณ์ไฟฟ้าอุตสาหกรรมและในครัวเรือนได้ในสถานที่ที่ไม่มี เครือข่ายไฟฟ้า, เช่นเดียวกับ หน่วยพลังงานสำหรับรถยนต์ ( รถไฮบริด) เป็นเครื่องกำเนิดไฟฟ้าแบบเคลื่อนที่ ตัวอย่างเช่นเครื่องกำเนิดพลังงานไฟฟ้าในรูปแบบของนักการทูต (กระเป๋าเดินทาง, กระเป๋า) ผู้ใช้พาเขาไปยังสถานที่ที่ไม่มีเครือข่ายไฟฟ้า (การก่อสร้าง การเดินป่า บ้านในชนบท ฯลฯ) หากจำเป็น โดยการกดปุ่ม "เริ่มต้น" เครื่องกำเนิดไฟฟ้าจะเริ่มต้นและจ่ายพลังงานไฟฟ้าให้กับเครื่องใช้ไฟฟ้าที่เชื่อมต่ออยู่: เครื่องใช้ไฟฟ้า. นี่เป็นแหล่งพลังงานไฟฟ้าทั่วไป มีราคาถูกกว่าและเบากว่าแอนะล็อกมากเท่านั้น
การใช้มอเตอร์แนวราบทำให้สามารถสร้างรถยนต์ขนาดเล็กที่ราคาไม่แพง ใช้งานง่าย และจัดการได้
รถยนต์ที่มีเครื่องกำเนิดไฟฟ้าเชิงเส้น
ยานพาหนะที่มีเครื่องกำเนิดไฟฟ้าเชิงเส้นเป็นรถยนต์ขนาดเบา (250 กก.) รูปที่ 13.
เมื่อขับรถ ไม่จำเป็นต้องเปลี่ยนความเร็ว (สองคัน) เนื่องจากเครื่องกำเนิดไฟฟ้าสามารถพัฒนากำลังสูงสุดแม้เมื่อ "สตาร์ท" จากการหยุดนิ่ง (ต่างจากรถทั่วไป) ลักษณะการเร่งความเร็วแม้ในกำลังต่ำ มอเตอร์ฉุด, มี ประสิทธิภาพที่ดีที่สุดกว่ารถยนต์ทั่วไป เอฟเฟกต์พวงมาลัยพาวเวอร์และ ระบบ ABSทำได้โดยทางโปรแกรมเนื่องจาก "ฮาร์ดแวร์" ที่จำเป็นทั้งหมดมีอยู่แล้ว (การขับเคลื่อนไปยังแต่ละล้อช่วยให้คุณควบคุมแรงบิดหรือ แรงบิดเบรกตัวอย่างเช่น เมื่อหมุนพวงมาลัย แรงบิดจะถูกกระจายระหว่างล้อควบคุมด้านขวาและด้านซ้าย และล้อจะหมุนเอง ผู้ขับขี่อนุญาตให้หมุนได้เท่านั้น นั่นคือการควบคุมที่ง่ายดาย) เลย์เอาต์ของบล็อกช่วยให้คุณจัดเรียงรถตามคำขอของผู้บริโภค (คุณสามารถเปลี่ยนเครื่องกำเนิดไฟฟ้าได้อย่างง่ายดายด้วยเครื่องที่ทรงพลังกว่าในเวลาไม่กี่นาที)
มัน รถธรรมดาถูกกว่าและเบากว่าแอนะล็อกมากเท่านั้น
คุณสมบัติ - ใช้งานง่าย ต้นทุนต่ำ ชุดความเร็วที่รวดเร็ว กำลังสูงสุด 12 กิโลวัตต์ ระบบขับเคลื่อนสี่ล้อ (รถออฟโรด)
ยานพาหนะที่มีเครื่องกำเนิดไฟฟ้าที่เสนอ เนื่องจากรูปร่างเฉพาะของเครื่องกำเนิดไฟฟ้า มีจุดศูนย์ถ่วงต่ำมาก ดังนั้นจะมีความเสถียรในการขับขี่สูง นอกจากนี้ ยานพาหนะดังกล่าวจะมีลักษณะอัตราเร่งที่สูงมาก สามารถใช้รถที่เสนอได้ พลังสูงสุดหน่วยพลังงานตลอดช่วงความเร็วทั้งหมด มวลแบบกระจายของหน่วยพลังงานไม่ได้โหลดตัวรถ ดังนั้นจึงทำให้ราคาถูก เบาและเรียบง่าย
เครื่องยนต์ฉุดของยานพาหนะที่ใช้เป็นหน่วยกำลังต้องเป็นไปตามเงื่อนไขต่อไปนี้:
ขดลวดกำลังของเครื่องยนต์ต้องเชื่อมต่อโดยตรงโดยไม่ต้องมีตัวแปลงไปยังขั้วของเครื่องกำเนิดไฟฟ้า (เพื่อเพิ่มประสิทธิภาพของระบบส่งกำลังและลดราคาของเครื่องแปลงกระแสไฟฟ้า)
ความเร็วในการหมุนของเพลาส่งออกของมอเตอร์ไฟฟ้าควรได้รับการควบคุมในช่วงกว้าง และไม่ควรขึ้นอยู่กับความถี่ของเครื่องกำเนิดไฟฟ้า
เครื่องยนต์ต้องมีเวลาสูงระหว่างความล้มเหลวนั่นคือมีความน่าเชื่อถือในการทำงาน (ไม่มีตัวสะสม)
เครื่องยนต์ต้องมีราคาไม่แพง (ธรรมดา)
มอเตอร์ต้องมีแรงบิดสูงที่ความเร็วเอาต์พุตต่ำ
เครื่องยนต์ควรมีมวลน้อย
วงจรสำหรับการเปิดขดลวดของเครื่องยนต์ดังกล่าวแสดงในรูปที่ 14. โดยการเปลี่ยนขั้วของแหล่งจ่ายไฟของขดลวดโรเตอร์ เราจะได้แรงบิดของโรเตอร์
นอกจากนี้ โดยการเปลี่ยนขนาดและขั้วของแหล่งจ่ายไฟของขดลวดโรเตอร์ การหมุนแบบเลื่อนของโรเตอร์ที่สัมพันธ์กับสนามแม่เหล็กของสเตเตอร์ก็ถูกนำมาใช้ โดยการควบคุมกระแสไฟจ่ายของขดลวดโรเตอร์ สลิปจะถูกควบคุมในช่วงตั้งแต่ 0 ... 100% แหล่งจ่ายไฟของขดลวดโรเตอร์อยู่ที่ประมาณ 5% ของกำลังมอเตอร์ ดังนั้นจึงไม่จำเป็นต้องทำกับกระแสทั้งหมดของมอเตอร์ฉุด แต่สำหรับกระแสกระตุ้นเท่านั้น พลังของตัวแปลงกระแสไฟฟ้าเช่นสำหรับเครื่องกำเนิดไฟฟ้าออนบอร์ดขนาด 12 กิโลวัตต์มีเพียง 600 วัตต์และกำลังนี้แบ่งออกเป็นสี่ช่อง (มอเตอร์ลากแต่ละล้อมีช่องของตัวเอง) นั่นคือ กำลังของคอนเวอร์เตอร์แต่ละแชนเนลคือ 150 W. ดังนั้นประสิทธิภาพของคอนเวอร์เตอร์ที่ต่ำจะไม่ส่งผลกระทบอย่างมีนัยสำคัญต่อประสิทธิภาพของระบบ คอนเวอร์เตอร์สามารถสร้างขึ้นโดยใช้องค์ประกอบเซมิคอนดักเตอร์ที่ใช้พลังงานต่ำและราคาถูก
กระแสจากเอาท์พุตของเครื่องกำเนิดไฟฟ้าที่ไม่มีการแปลงใดๆ จะถูกส่งไปยังขดลวดไฟฟ้าของมอเตอร์ฉุดลาก เฉพาะกระแสกระตุ้นเท่านั้นที่ถูกแปลงเพื่อให้อยู่ในแอนติเฟสกับกระแสของขดลวดไฟฟ้าเสมอ เนื่องจากกระแสกระตุ้นเพียง 5 ... 6% ของกระแสทั้งหมดที่ใช้โดยมอเตอร์ฉุด จำเป็นต้องใช้ตัวแปลงสำหรับกำลัง 5 ... 6% ของกำลังเครื่องกำเนิดไฟฟ้าทั้งหมด ซึ่งจะลดราคาและน้ำหนักลงอย่างมาก ของคอนเวอร์เตอร์และเพิ่มประสิทธิภาพของระบบ ในกรณีนี้ ตัวแปลงกระแสกระตุ้นของมอเตอร์ฉุดต้อง "รู้" ตำแหน่งของเพลามอเตอร์เพื่อจ่ายกระแสไฟไปยังขดลวดกระตุ้นตลอดเวลาเพื่อสร้างแรงบิดสูงสุด เซ็นเซอร์ตำแหน่งของเพลาส่งออกของมอเตอร์ฉุดเป็นตัวเข้ารหัสสัมบูรณ์
การใช้เครื่องกำเนิดไฟฟ้าเชิงเส้นเป็นหน่วยกำลังของยานพาหนะช่วยให้คุณสร้างรถยนต์ในรูปแบบบล็อกได้ หากจำเป็น สามารถเปลี่ยนส่วนประกอบและส่วนประกอบขนาดใหญ่ได้ภายในไม่กี่นาที 15 และยังใช้ตัวถังที่มีการไหลที่ดีที่สุดเนื่องจากรถยนต์ที่ใช้พลังงานต่ำไม่มีกำลังสำรองที่จะเอาชนะแรงต้านของอากาศเนื่องจากรูปร่างแอโรไดนามิกที่ไม่สมบูรณ์ (เนื่องจากค่าสัมประสิทธิ์การลากสูง)
รถคอมเพรสเซอร์เชิงเส้น
ยานพาหนะที่มีคอมเพรสเซอร์เชิงเส้นคือรถยนต์สองที่นั่งที่มีน้ำหนักเบา (200 กก.) รูปที่ 16. ง่ายกว่าและ อะนาล็อกราคาถูกรถที่มีเครื่องกำเนิดไฟฟ้าเชิงเส้น แต่มีประสิทธิภาพการส่งต่ำกว่า
ตัวเข้ารหัสแบบเพิ่มหน่วยถูกใช้เป็นเซ็นเซอร์ความเร็วล้อ ตัวเข้ารหัสแบบเพิ่มหน่วยมีเอาต์พุตพัลส์ เมื่อหมุนด้วยมุมหนึ่ง พัลส์แรงดันไฟฟ้าจะถูกสร้างขึ้นที่เอาต์พุต วงจรอิเล็กทรอนิกส์ของเซ็นเซอร์ "นับ" จำนวนพัลส์ต่อหน่วยเวลา และเขียนรหัสนี้ไปยังรีจิสเตอร์เอาต์พุต เมื่อระบบควบคุม "ส่ง" รหัส (ที่อยู่) ของเซ็นเซอร์นี้ วงจรไฟฟ้าตัวเข้ารหัสในรูปแบบอนุกรมให้รหัสจากการลงทะเบียนเอาต์พุตไปยังตัวนำข้อมูล ระบบควบคุมอ่านรหัสเซ็นเซอร์ (ข้อมูลเกี่ยวกับความเร็วล้อ) และตามอัลกอริธึมที่กำหนด จะสร้างรหัสสำหรับควบคุมสเต็ปเปอร์มอเตอร์ของแอคทูเอเตอร์
บทสรุป
ค่าใช้จ่ายของยานพาหนะสำหรับคนส่วนใหญ่คือ 20-50 รายได้ต่อเดือน คนหาซื้อไม่ได้ รถใหม่สำหรับ 8...12,000 ดอลลาร์ และไม่มีรถในตลาดในช่วงราคา 1...2 พันดอลลาร์ การใช้เครื่องกำเนิดไฟฟ้าเชิงเส้นหรือคอมเพรสเซอร์เป็นหน่วยกำลังของรถยนต์ทำให้สามารถสร้างยานพาหนะที่ใช้งานง่ายและราคาไม่แพง
เทคโนโลยีสมัยใหม่สำหรับการผลิตแผงวงจรพิมพ์และผลิตภัณฑ์อิเล็กทรอนิกส์ต่างๆ ที่ผลิตขึ้น ทำให้การเชื่อมต่อทางไฟฟ้าเกือบทั้งหมดโดยใช้สายไฟสองเส้น - พลังงานและข้อมูล นั่นคือไม่ติดตั้งการเชื่อมต่อของแต่ละคน เครื่องใช้ไฟฟ้า: เซ็นเซอร์ แอคทูเอเตอร์ และอุปกรณ์ส่งสัญญาณ และเชื่อมต่อแต่ละอุปกรณ์เข้ากับสายไฟและสายข้อมูลทั่วไป ในทางกลับกัน ระบบควบคุมจะแสดงรหัส (ที่อยู่) ของอุปกรณ์เป็นรหัสซีเรียลบนสายข้อมูล หลังจากนั้นระบบจะคาดหวังข้อมูลเกี่ยวกับสถานะของอุปกรณ์ รวมทั้งรหัสซีเรียลและในบรรทัดเดียวกัน . จากสัญญาณเหล่านี้ ระบบควบคุมจะสร้างรหัสควบคุมสำหรับอุปกรณ์สั่งงานและส่งสัญญาณ และส่งเพื่อถ่ายโอนอุปกรณ์สั่งงานหรือส่งสัญญาณไปยังสถานะใหม่ (ถ้าจำเป็น) ดังนั้น ในระหว่างการติดตั้งหรือซ่อมแซม อุปกรณ์แต่ละชิ้นจะต้องเชื่อมต่อกับสายไฟสองเส้น (สายไฟสองเส้นนี้ใช้ร่วมกันกับเครื่องใช้ไฟฟ้าบนบอร์ดทั้งหมด) และมวลไฟฟ้า
เพื่อลดต้นทุนและราคาของผลิตภัณฑ์สำหรับผู้บริโภคจึงจำเป็นต้องทำให้การติดตั้งและการเชื่อมต่อทางไฟฟ้าของอุปกรณ์ออนบอร์ดง่ายขึ้น ตัวอย่างเช่น ในการติดตั้งแบบเดิม ให้เปิดด้านหลัง ไฟด้านข้างจำเป็นต้องปิดโดยใช้สวิตช์วงจรจ่ายไฟ อุปกรณ์ให้แสงสว่าง. วงจรประกอบด้วย: แหล่งพลังงานไฟฟ้า, สายเชื่อมต่อ, สวิตช์ที่ค่อนข้างทรงพลัง, โหลดไฟฟ้า แต่ละองค์ประกอบของวงจร ยกเว้นแหล่งพลังงาน ต้องมีการติดตั้งแยกกัน สวิตช์เชิงกลราคาไม่แพง มีรอบ "เปิด-ปิด" จำนวนน้อย ด้วยอุปกรณ์ไฟฟ้าออนบอร์ดจำนวนมาก ค่าใช้จ่ายในการติดตั้งและการเชื่อมต่อสายไฟจะเพิ่มขึ้นตามสัดส่วนของจำนวนอุปกรณ์ และโอกาสที่จะเกิดข้อผิดพลาดเนื่องจากปัจจัยมนุษย์เพิ่มขึ้น สำหรับการผลิตปริมาณมาก การจัดการที่ง่ายขึ้นอุปกรณ์และการอ่านข้อมูลจากเซ็นเซอร์ควรทำในบรรทัดเดียว และไม่แยกกัน สำหรับแต่ละอุปกรณ์ ตัวอย่างเช่น หากต้องการเปิดไฟท้าย ในกรณีนี้ คุณต้องแตะเซ็นเซอร์สัมผัส วงจรควบคุมจะสร้างรหัสควบคุมเพื่อเปิดไฟท้าย ที่อยู่ของอุปกรณ์เปิดสวิตช์ไฟตำแหน่งด้านหลังและสัญญาณที่จะเปิดจะถูกส่งไปยังสายข้อมูล หลังจากนั้นวงจรไฟฟ้าภายในของไฟตำแหน่งด้านหลังจะปิดลง นั่นคือ วงจรไฟฟ้าเกิดขึ้นในลักษณะที่ซับซ้อน: โดยอัตโนมัติในระหว่างการผลิตแผงวงจรพิมพ์ (เช่น เมื่อติดตั้งแผงบนสาย SMD) และโดย การเชื่อมต่อไฟฟ้าอุปกรณ์ทั้งหมดที่มีสายไฟทั่วไปสองเส้นและ "มวล" ทางไฟฟ้า
บรรณานุกรม
- คู่มือฟิสิกส์: Kuchling H. Trans. กับเขา. ฉบับที่ 2 - M.: Mir, 1985. - 520 p., ill.
- กังหันก๊าซ การขนส่งทางรถไฟ. Bartosh E. T. Transport Publishing House, 1972, pp. 1-144.
- การร่าง - Haskin A. M. 4th ed., Perrerab และพิเศษ --.: Vishcha shk. หัวหน้าสำนักพิมพ์ 2528 - 447 น.
- Triacs และการใช้งานในอุปกรณ์ไฟฟ้าในครัวเรือน Yu. A. Evseev, S. S. Krylov 1990.
- นิตยสารโฆษณาและข้อมูลรายเดือน "ตลาดไฟฟ้า" ครั้งที่ 5 (23) กันยายน-ตุลาคม 2551
- การออกแบบเครื่องยนต์ออโต้แทรคเตอร์ R. A. Zeinetdinov, Dyakov I. F. , S. V. Yarygin กวดวิชา Ulyanovsk: UlGTU, 2004.- 168 หน้า
- พื้นฐานของเทคโนโลยีตัวแปลง: กวดวิชาสำหรับมหาวิทยาลัย / O.Z. Popkov ฉบับที่ 2, เครื่องเสียง. - M.: MPEI Publishing House, 2007. 200 p.: ill.
- พื้นฐานของอิเล็กทรอนิคส์อุตสาหกรรม: หนังสือเรียนที่ไม่ใช่อิเล็กโทรเทคนิค ผู้เชี่ยวชาญ. มหาวิทยาลัย /V.G. Gerasimov, O M. Knyazkov, A E. Krasnopolsky, V.V. ซูโฮรูคอฟ; เอ็ด วีจี เจอราซิมอฟ - ครั้งที่ 3 แก้ไข และเพิ่มเติม - ม.: สูงกว่า. โรงเรียน 2549 - 336 น. ป่วย
- . ทฤษฎีและการคำนวณกระบวนการทำงาน ฉบับที่ 4 แก้ไขและเพิ่มเติม ภายใต้กองบรรณาธิการทั่วไปของ A.S. Orlin และ M.G. ครูกลอฟ. ม.: มาชิโนสโตรอีนี. พ.ศ. 2527
- วิศวกรรมไฟฟ้าและอิเล็กทรอนิกส์ ใน 3 เล่ม เอ็ด. วีจี เจอราซิมอฟ เล่ม 2 อุปกรณ์แม่เหล็กไฟฟ้าและเครื่องจักรไฟฟ้า - ม.: ม. - 2550
ขอบคุณมากสำหรับการมีส่วนร่วมของคุณในการพัฒนาวิทยาศาสตร์และเทคโนโลยีในประเทศ!
มอเตอร์ไฟฟ้าส่วนใหญ่เป็นมอเตอร์ไฟฟ้าแบบหมุน ในเวลาเดียวกัน เครื่องจักรการผลิตจำนวนมากต้องดำเนินการแปล (เช่น สายพานลำเลียง สายพานลำเลียง ฯลฯ) หรือการเคลื่อนที่แบบลูกสูบ (กลไกการป้อนเครื่องมือเครื่องจักร ตัวจัดการ ลูกสูบและอื่น ๆ ) ตามเทคโนโลยีของงาน เครื่อง)
การแปลงการเคลื่อนที่แบบหมุนเป็นการแปลจะดำเนินการโดยใช้การเชื่อมโยงจลนศาสตร์พิเศษ: น็อตสกรู เฟืองบอลสกรู แร็คฟันเฟือง เฟืองข้อเหวี่ยง และอื่นๆ
เป็นเรื่องปกติสำหรับผู้ออกแบบเครื่องจักรที่ใช้ทำงานที่จะใช้เครื่องยนต์ที่โรเตอร์เคลื่อนที่เป็นเส้นตรงเพื่อขับเคลื่อนส่วนการทำงานที่ทำการเคลื่อนที่แบบแปลนและแบบลูกสูบ
ในปัจจุบัน ไดรฟ์ไฟฟ้ากำลังได้รับการพัฒนาโดยใช้ลิเนียร์อะซิงโครนัส วาล์ว และ โดยหลักการแล้ว มอเตอร์แนวราบทุกประเภทสามารถเกิดขึ้นได้จากมอเตอร์แบบโรตารี่โดยการพัฒนาเชิงเส้นตรงของสเตเตอร์ทรงกระบอกให้เป็นระนาบ
แนวคิดเกี่ยวกับโครงสร้างของมอเตอร์แบบอะซิงโครนัสเชิงเส้นสามารถทำได้โดยการเปลี่ยนสเตเตอร์ของมอเตอร์แบบอะซิงโครนัสให้เป็นระนาบ ในกรณีนี้ เวกเตอร์ของแรงแม่เหล็กของสเตเตอร์จะเคลื่อนที่เป็นเส้นตรงตามการกวาดของสเตเตอร์ กล่าวคือ ในกรณีนี้ไม่หมุน (เช่นใน เครื่องยนต์ธรรมดา) แต่สนามแม่เหล็กไฟฟ้าเคลื่อนที่ของสเตเตอร์
แถบแม่เหล็กที่มีช่องว่างอากาศเล็ก ๆ ตามแนวสเตเตอร์สามารถใช้เป็นองค์ประกอบรองได้ แถบนี้เล่นบทบาทของโรเตอร์กรงกระรอก องค์ประกอบรองจะถูกนำออกไปโดยสนามสเตเตอร์ที่กำลังเคลื่อนที่และเคลื่อนที่เป็นเส้นตรงด้วยความเร็วที่น้อยกว่าความเร็วของสนามสเตเตอร์ตามปริมาณสลิปสัมบูรณ์เชิงเส้น
ความเร็วเชิงเส้นของสนามแม่เหล็กไฟฟ้าเคลื่อนที่จะเป็น
![]()
โดยที่ τ, m - การแบ่งขั้ว - ระยะห่างระหว่างขั้วที่อยู่ติดกันของมอเตอร์เหนี่ยวนำเชิงเส้น
ความเร็วองค์ประกอบรอง
![]()
โดยที่ sL คือสลิปเชิงเส้นสัมพัทธ์
เมื่อมอเตอร์ขับเคลื่อนด้วยแรงดันไฟฟ้าความถี่มาตรฐาน ความเร็วของสนามที่ได้จะค่อนข้างใหญ่ (มากกว่า 3 ม./วินาที) ซึ่งทำให้ยากต่อการใช้มอเตอร์เหล่านี้ในการขับเคลื่อนกลไกทางอุตสาหกรรม มอเตอร์เหล่านี้ใช้สำหรับความเร็วสูง กลไกการขนส่ง. สำหรับข้อมูลเพิ่มเติม ความเร็วต่ำการเคลื่อนที่และการควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัสเชิงเส้น ขดลวดถูกป้อนจากเครื่องแปลงความถี่
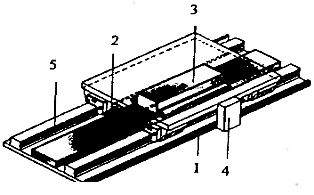
ข้าว. 1. การออกแบบมอเตอร์พิกัดเดี่ยวเชิงเส้น
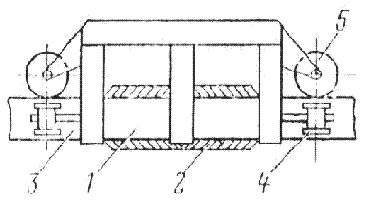
ใช้ตัวเลือกการออกแบบหลายแบบสำหรับมอเตอร์เหนี่ยวนำเชิงเส้น หนึ่งในนั้นแสดงในรูปที่ 1. ที่นี่องค์ประกอบรอง (2) - แถบที่เชื่อมต่อกับตัวเครื่องเคลื่อนที่ไปตามเส้นบอกแนว 1 ภายใต้การกระทำของสนามแม่เหล็กไฟฟ้าเดินทางที่สร้างโดยสเตเตอร์ 3 การออกแบบนี้สะดวกสำหรับการประกอบกับเครื่องทำงาน มันเกี่ยวข้องกับฟลักซ์เร่ร่อนที่สำคัญของสนามสเตเตอร์ เป็นผลให้ cosφ ของมอเตอร์จะต่ำ

รูปที่ 2 มอเตอร์เชิงเส้นการออกแบบทรงกระบอก
เพื่อเพิ่มการมีเพศสัมพันธ์ทางแม่เหล็กไฟฟ้าระหว่างสเตเตอร์และองค์ประกอบรอง ส่วนหลังจะถูกวางไว้ในช่องระหว่างสเตเตอร์ทั้งสอง หรือการออกแบบเครื่องยนต์ทำในรูปแบบของกระบอกสูบ (ดูรูปที่ 2) ในกรณีนี้ สเตเตอร์ของมอเตอร์จะเป็นหลอด (1) ซึ่งข้างในเป็นขดลวดทรงกระบอกเรียงซ้อนกัน (2) ซึ่งเป็นขดลวดสเตเตอร์ ระหว่างขดลวดจะมีวงแหวนแม่เหล็ก 3 ซึ่งเป็นส่วนหนึ่งของวงจรแม่เหล็ก องค์ประกอบรอง - แท่งท่อยังทำจากวัสดุที่เป็นเหล็ก
มอเตอร์เหนี่ยวนำเชิงเส้นยังสามารถออกแบบกลับด้านได้ โดยที่ตัวรองอยู่นิ่งและสเตเตอร์กำลังเคลื่อนที่ เครื่องยนต์ดังกล่าวมักใช้ในรถยนต์ ในกรณีนี้จะใช้รางหรือแถบพิเศษเป็นองค์ประกอบรองและวางสเตเตอร์ไว้บนรถเข็นแบบเคลื่อนย้ายได้
ขาดเส้นตรง เอ มอเตอร์ซิงโครนัสคือประสิทธิภาพต่ำและการสูญเสียพลังงานที่เกี่ยวข้อง โดยเฉพาะอย่างยิ่งในองค์ประกอบรอง (การสูญเสียการลื่น)
เมื่อเร็ว ๆ นี้นอกเหนือจากแบบอะซิงโครนัสพวกเขาเริ่มใช้ การออกแบบมอเตอร์แนวราบประเภทนี้คล้ายกับที่แสดงในรูปที่ 1. มอเตอร์สเตเตอร์ถูกเปลี่ยนเป็นระนาบและวางแม่เหล็กถาวรไว้ที่องค์ประกอบรอง การออกแบบกลับหัวอาจแตกต่างออกไป เมื่อสเตเตอร์เป็นส่วนที่เคลื่อนไหว และองค์ประกอบรองที่มีแม่เหล็กถาวรจะอยู่กับที่ ขดลวดสเตเตอร์จะเปลี่ยนไปตามตำแหน่งสัมพัทธ์ของแม่เหล็ก ด้วยเหตุนี้จึงมีการออกแบบเซ็นเซอร์ตำแหน่ง (4 - ในรูปที่ 1)
สำหรับการขับเคลื่อนตำแหน่ง แอคทูเอเตอร์เชิงเส้นก็ถูกใช้อย่างมีประสิทธิภาพเช่นกัน สเต็ปเปอร์มอเตอร์. หากสเตเตอร์มอเตอร์สเตเตอร์ถูกเปลี่ยนเป็นระนาบและองค์ประกอบรองถูกสร้างขึ้นในรูปแบบของจานที่ฟันเกิดจากการกัดร่องจากนั้นด้วยการเปลี่ยนขดลวดสเตเตอร์อย่างเหมาะสมองค์ประกอบรองจะทำการเคลื่อนไหวแบบไม่ต่อเนื่อง ขั้นตอนนี้อาจมีขนาดเล็กมาก - มากถึงเศษส่วนของมิลลิเมตร มักใช้การออกแบบกลับด้าน ซึ่งองค์ประกอบรองจะอยู่นิ่ง
ความเร็วของสเต็ปเปอร์มอเตอร์เชิงเส้นถูกกำหนดโดยค่าของการแบ่งฟัน τ จำนวนเฟส ม. และความถี่สวิตชิ่ง
ใบเสร็จ ความเร็วสูงการเคลื่อนไหวไม่ได้ทำให้เกิดปัญหา เนื่องจากการเพิ่มขึ้นของการแบ่งฟันและความถี่ไม่ได้ถูกจำกัดด้วยปัจจัยทางเทคโนโลยี มีข้อจำกัดสำหรับค่าต่ำสุดของ τ เนื่องจาก อัตราส่วนของการแบ่งฟันต่อช่องว่างระหว่างสเตเตอร์และองค์ประกอบรองต้องมีอย่างน้อย 10

การใช้ไดรฟ์แบบไม่ต่อเนื่องช่วยให้การออกแบบกลไกที่เคลื่อนที่ด้วยพิกัดเดียวเชิงเส้นง่ายขึ้น แต่ยังช่วยให้ได้รับการเคลื่อนไหวสองหรือหลายพิกัดโดยใช้ไดรฟ์เดียว หากระบบขดลวดสองระบบจัดวางในมุมฉากบนสเตเตอร์ของชิ้นส่วนที่เคลื่อนที่ และร่องถูกสร้างขึ้นในองค์ประกอบรองในสองทิศทางตั้งฉาก จากนั้นองค์ประกอบที่เคลื่อนที่จะทำการเคลื่อนไหวแบบไม่ต่อเนื่องในสองพิกัด กล่าวคือ ให้การเคลื่อนไหวบนเครื่องบิน
ในกรณีนี้ ปัญหาเกิดจากการสร้างการสนับสนุนสำหรับองค์ประกอบที่เคลื่อนย้ายได้ ในการแก้ปัญหานี้คุณสามารถใช้เบาะลม - แรงดันอากาศที่จ่ายในพื้นที่ภายใต้องค์ประกอบที่เคลื่อนไหว ลิเนียร์สเต็ปเปอร์มอเตอร์พัฒนาค่อนข้างต่ำ แรงดึงและมีประสิทธิภาพต่ำ การใช้งานหลัก ได้แก่ เครื่องควบคุมแบบเบา เครื่องประกอบแบบเบา เครื่องวัด เครื่องตัดเลเซอร์ และอุปกรณ์อื่นๆ
Katolitsky Nikita Alexandrovich
นักศึกษาคณะไฟฟ้ากำลัง Stavropol State Agrarian University Stavropol ประเทศรัสเซีย
บทคัดย่อ: บทความอธิบายอุปกรณ์ ประเภทของมอเตอร์เชิงเส้น ความแตกต่างจากมอเตอร์ไฟฟ้าประเภทอื่น อธิบายรายละเอียดการใช้งาน ข้อดีและข้อเสีย บทความนี้มีวัตถุประสงค์เพื่ออธิบายข้อดีของลิเนียร์มอเตอร์มากกว่ารุ่นอื่นๆ
คำสำคัญ: มอเตอร์ไฟฟ้าเชิงเส้น, โรเตอร์, สเตเตอร์, ไดรฟ์, กระดอง, วงจรแม่เหล็ก
มอเตอร์ไฟฟ้าเชิงเส้น
Katolickij Nikita Aleksandrovich
นักศึกษา แผนกไฟฟ้า Stavropol State Agrarian University Stavropol ประเทศรัสเซีย
บทคัดย่อ: ในบทความเรื่องอุปกรณ์ มีการอธิบายประเภทของเครื่องยนต์เชิงเส้นที่มีความแตกต่างจากมอเตอร์ไฟฟ้าประเภทอื่น การใช้งาน ข้อดีและข้อเสียได้อธิบายไว้อย่างละเอียด วัตถุประสงค์ของบทความประกอบด้วยคำอธิบายข้อดีของเอ็นจิ้นเชิงเส้นเหนือสิ่งอื่นใด
คำสำคัญ: มอเตอร์ไฟฟ้าเชิงเส้น โรเตอร์ สเตเตอร์ ไดรฟ์ สมอ ตัวนำแม่เหล็ก
เป็นเวลาหลายปีที่อุตสาหกรรมต้องพึ่งพาสายพานและตัวขับสกรูแบบต่างๆ รวมถึงกลไกลมเพื่อกำหนดตำแหน่งเชิงเส้น ความต้องการแบนด์วิธความเร็วสูง รอบการทำงานหลายรอบ การกำหนดค่าที่ยืดหยุ่นและการตั้งโปรแกรมได้ระบุจุดอ่อนในอุปกรณ์เหล่านี้ มักจะมีการแลกเปลี่ยนที่ต้องทำเมื่อทำการควบคุมตำแหน่งที่แม่นยำในการเคลื่อนที่แบบแปลน
เทคโนโลยีการขับเคลื่อนโดยตรงของมอเตอร์เชิงเส้นบรรลุผล คุณภาพสูงการแก้ปัญหาการวางตำแหน่งเชิงเส้น เทคโนโลยีนี้เกี่ยวข้องกับการใช้แรงโดยตรงของปฏิสัมพันธ์ทางแม่เหล็กไฟฟ้าโดยไม่ต้องใช้สายพาน บอลสกรู หรือตัวเชื่อมกลางอื่นๆ ไดรฟ์เชิงเส้นตรงให้ตรง การเคลื่อนที่เชิงเส้น(ไม่เกิดการแปลงการเคลื่อนที่แบบหมุนไปเป็นแบบแปลน)
รูปที่ 1 - อุปกรณ์ของมอเตอร์เชิงเส้น
มอเตอร์ไฟฟ้าเชิงเส้นเป็นกลไกที่ส่วนที่เคลื่อนที่ได้ไม่หมุน (ในรุ่นดั้งเดิมของมอเตอร์ ส่วนที่เคลื่อนที่ได้จะหมุน) แต่เคลื่อนที่เป็นเส้นตรงไปตามส่วนที่คงที่ของหน่วย ซึ่งแสดงในรูปของวงจรแม่เหล็กเปิด ความยาวมีค่าโดยพลการ สนามแม่เหล็กเคลื่อนที่ถูกสร้างขึ้นภายในวงจรแม่เหล็ก ในมอเตอร์ไฟฟ้ามาตรฐาน โรเตเตอร์และสเตเตอร์จะถูกม้วนขึ้นในรูปของวงแหวน ในขณะที่มอเตอร์แบบลิเนียร์องค์ประกอบเหล่านี้จะถูกยืดออกเป็นแถบ เนื่องจากการเปิดขดลวดสเตเตอร์สลับกันจึงสร้างสนามแม่เหล็กเคลื่อนที่ขึ้น องค์ประกอบของมอเตอร์ไฟฟ้าเชิงเส้น กระแสตรงกระดองเข้าไปพร้อมกับขดลวดที่อยู่บนพื้นผิวซึ่งเป็นตัวสะสม (องค์ประกอบนำทาง) และวงจรแม่เหล็กเปิดที่มีขดลวดกระตุ้น (ส่วนที่เคลื่อนที่) เรียงตามลำดับเพื่อให้เวกเตอร์ของแรงที่ปรากฏในขั้วของวงจรแม่เหล็กมี ทิศทางเดียว. ความง่ายในการปรับความเร็วของการเคลื่อนที่ของชิ้นส่วนที่เคลื่อนไหว - ลักษณะเด่นมอเตอร์เชิงเส้น มวลรวม กระแสสลับสามารถซิงโครนัสหรืออะซิงโครนัส กระดองในมอเตอร์เชิงเส้นแบบอะซิงโครนัสทำในรูปแบบของแท่งซึ่งส่วนใหญ่มักจะเป็นส่วนสี่เหลี่ยมซึ่งไม่มีขดลวด กระดองติดตั้งตามเส้นทางการเคลื่อนที่ของชิ้นส่วนที่เคลื่อนที่ของยูนิตซึ่งมีวงจรแม่เหล็กพร้อมขดลวดหลายเฟสที่ปรับใช้ซึ่งขับเคลื่อนโดยแหล่งกระแสสลับ อันเป็นผลมาจากการทำงานร่วมกันของสนามแม่เหล็กของวงจรแม่เหล็กของชิ้นส่วนที่เคลื่อนที่และสนามเกราะ แรงปรากฏขึ้นที่ทำให้ส่วนที่เคลื่อนที่เคลื่อนที่เร็วขึ้นเมื่อเทียบกับเกราะคงที่ กระบวนการนี้เกิดขึ้นจนกระทั่งได้สมการความเร็วของการเคลื่อนที่ของชิ้นส่วนที่เคลื่อนที่และสนามแม่เหล็กเคลื่อนที่
ส่วนใหญ่มักใช้หน่วยดังกล่าวในด้านการขนส่งทางไฟฟ้า สิ่งนี้อำนวยความสะดวกด้วยข้อดีพิเศษของเครื่องยนต์ประเภทนี้:
การเคลื่อนที่เป็นเส้นตรงของสเตเตอร์นั้นยอดเยี่ยมสำหรับรถยนต์หลายคัน
การออกแบบที่เรียบง่ายซึ่งไม่มีองค์ประกอบถู นั่นคือ การไหลของพลังงานภายในสนามแม่เหล็กจะถูกแปลงเป็นพลังงานกลโดยตรง ด้วยเหตุนี้จึงทำให้เครื่องมีประสิทธิภาพและความน่าเชื่อถือสูง
ความเป็นอิสระของแรงฉุดจากการยึดเกาะ ชุดล้อกับรางรถไฟ คุณสมบัตินี้ไม่สามารถเข้าถึงได้สำหรับมวลรวมมาตรฐาน แรงฉุดไฟฟ้า;
ไม่มีความเป็นไปได้ในการลากล้อของรถยนต์ไฟฟ้าซึ่งเป็นเหตุผลในการเลือกมอเตอร์เชิงเส้น
ความเร่งและความเร็วของการขนส่งสามารถมีค่าใด ๆ ก็ตาม ถูกจำกัดด้วยความสะดวกสบายในการเคลื่อนไหว ความเร็วที่อนุญาตการกลิ้งของล้อบนรางรถไฟและถนน ตลอดจนระดับความเสถียรแบบไดนามิกของแชสซีของรถและทางวิ่ง
ลิเนียร์มอเตอร์ประเภทอะซิงโครนัสจะต้องขับเคลื่อนกลไกสำหรับการขนส่งผลิตภัณฑ์ต่างๆ สายพานลำเลียงเหล่านี้ติดตั้งสายพานโลหะที่ทำงานภายในสเตเตอร์ของระบบมอเตอร์เชิงเส้น ซึ่งทำหน้าที่เป็นส่วนประกอบรอง การใช้ระบบมอเตอร์แนวราบช่วยลดการดึงสายพาน ขจัดการเลื่อนหลุดของสายพาน และปรับปรุงความเร็วและความน่าเชื่อถือของสายพานลำเลียง
มอเตอร์แนวราบใช้สำหรับเครื่องกระแทก เช่น ค้อนตอกเสาเข็ม ซึ่งจำเป็นสำหรับงานถนนและการก่อสร้าง สเตเตอร์ของระบบมอเตอร์เชิงเส้นวางอยู่บนบูมค้อน และการเคลื่อนที่ไปตามองค์ประกอบไกด์ของบูมในแนวตั้งนั้นมาจากเครื่องกว้าน ส่วนกระแทกของค้อนทำหน้าที่ขององค์ประกอบรองของระบบขับเคลื่อน ในการยกส่วนกระแทกของค้อน เครื่องยนต์จะเปิดขึ้นเพื่อให้สนามวิ่งพุ่งขึ้นไปข้างบน เมื่อองค์ประกอบกระแทกไปถึงตำแหน่งบนสุด เครื่องยนต์จะปิดใช้งานและองค์ประกอบกระแทกจะเคลื่อนลงไปที่พื้นผิวของกองภายใต้อิทธิพลของแรงโน้มถ่วง บางครั้งการดับเครื่องยนต์จะไม่เกิดขึ้น - ระบบขับเคลื่อนทำงานในโหมดถอยหลัง ส่งผลให้แรงกระแทกเพิ่มขึ้น ตามระดับความลึกของเสาเข็ม สเตเตอร์ของระบบขับเคลื่อนจะเลื่อนลงเนื่องจากกว้าน การออกแบบค้อนไฟฟ้านั้นค่อนข้างง่าย มันค่อนข้างง่ายที่จะทำ ไม่จำเป็นต้องมีความแม่นยำเพิ่มขึ้นในระหว่างการผลิตองค์ประกอบ และการออกแบบไม่ไวต่อการเปลี่ยนแปลงของตัวบ่งชี้อุณหภูมิ ดังนั้นอุปกรณ์จึงสามารถเริ่มทำงานได้ทันที
ปั๊มแมกนีโตไฮโดรไดนามิกถือเป็นระบบขับเคลื่อนเชิงเส้นประเภทหนึ่ง อุปกรณ์เหล่านี้ใช้สำหรับสูบของเหลวที่เป็นสื่อกระแสไฟฟ้า ปั๊มดังกล่าวใช้กันอย่างแพร่หลาย: ในโลหะวิทยาสำหรับการขนส่ง การตวง และการเคลื่อนย้ายโลหะในรูปของเหลวและที่โรงไฟฟ้านิวเคลียร์เพื่อสูบน้ำหล่อเย็นโลหะเหลว
ปั๊มแมกนีโตไฮโดรไดนามิกมีสองประเภท: กระแสตรงและกระแสสลับ ในกรณีแรกแม่เหล็กไฟฟ้ารูปตัว C ทำหน้าที่เป็นองค์ประกอบหลัก (สเตเตอร์) ท่อที่มีโลหะเหลวติดตั้งอยู่ในช่องว่างอากาศของแม่เหล็กไฟฟ้า ต้องขอบคุณอิเล็กโทรดที่เชื่อมกับผนังท่อส่งกระแสตรงจากแหล่งภายนอก ในกรณีส่วนใหญ่ ขดลวดกระตุ้นจะรวมอยู่ในวงจรอนุกรมของอิเล็กโทรด เมื่อแม่เหล็กถูกกระตุ้น โลหะที่อยู่ในบริเวณที่กระแสตรงไหลผ่านจะได้รับผลกระทบจากแรงแม่เหล็กไฟฟ้า เช่นเดียวกับแรงที่กระทำต่อตัวนำที่มีกระแสไฟฟ้าซึ่งอยู่ในโซนของสนามแม่เหล็ก ผลของแรงนี้ทำให้โลหะเคลื่อนที่ผ่านไปป์ไลน์ ความแตกต่างที่สำคัญระหว่างปั๊ม MHD คือ การไม่มีองค์ประกอบทางกลที่เคลื่อนที่ เช่นเดียวกับความเป็นไปได้ในการปิดผนึกช่องทางการขนส่งโลหะ
ข้อดีของระบบขับเคลื่อนเชิงเส้นคือการไม่มีองค์ประกอบที่หมุนได้ ข้อเสียรวมถึงประสิทธิภาพพลังงานต่ำเมื่อเทียบกับรุ่นมาตรฐาน ไดรฟ์ไฟฟ้าซึ่งอธิบายโดยวงจรแม่เหล็กไฟฟ้าแบบเปิดและช่องว่างการทำงานที่สำคัญ นอกจากนี้ ข้อเสียคือ ความซับซ้อนและต้นทุนการผลิตสูง เชิงเส้น ระบบขับเคลื่อนใช้สำหรับรถไฟความเร็วสูง ขนส่งทางบกที่อยู่ในกลุ่มยานพาหนะที่ลอยได้ ประสิทธิภาพโดยรวมของหน่วยมาตรฐานและมอเตอร์ไฟฟ้าเชิงเส้น ในกรณีของการปรับให้เหมาะสมนั้นเกือบจะเท่ากัน ในกรณีที่ไม่รวมการเชื่อมโยงกลางของการส่งแรงฉุด เมื่อเวลาผ่านไป มอเตอร์เชิงเส้นจะเข้ามาแทนที่ไดรฟ์เกียร์แบบเดิม
บรรณานุกรม:
- Grinchenko V. A. เหตุผลของการออกแบบพื้นฐานของมอเตอร์ไฟฟ้าเชิงเส้น // ทฤษฎีและวิทยาศาสตร์ประยุกต์ - 2556. - เล่ม 1 - ฉบับที่ 11 (7). - ส. 58-60.
- Grinchenko V. A. , Mishukov S. V. การคำนวณแรงขับแบบสถิตของมอเตอร์ไฟฟ้าเชิงเส้น การออกแบบใหม่// งานใหม่ของวิทยาศาสตร์เทคนิคและวิธีการแก้ปัญหา - อูฟา: Aeterna, 2014. - S. 18-20.
- Nikitenko G. V. , Grinchenko V. A. มอเตอร์เคลื่อนที่แบบลูกสูบเชิงเส้นพร้อมการควบคุมแอมพลิจูดการสั่นของกระดอง // วิธีการและ วิธีการทางเทคนิคปรับปรุงประสิทธิภาพการใช้อุปกรณ์ไฟฟ้าในอุตสาหกรรมและการเกษตร - Stavropol: Agrus, 2009. - S. 407-410.
- Nikitenko G. V. , Grinchenko V. A. ผลการศึกษามอเตอร์เชิงเส้นสำหรับเครื่องดูดสูญญากาศของเครื่องรีดนม // วิธีการและวิธีการทางเทคนิคในการปรับปรุงประสิทธิภาพของการใช้อุปกรณ์ไฟฟ้าในอุตสาหกรรมและการเกษตร - Stavropol: Agrus, 2010. - S. 268-272.
- แพท. 2357143 สหพันธรัฐรัสเซีย, MPK8 F 16 K 31/06. โซลินอยด์วาล์ว/ Nikitenko G. V. , Grinchenko V. A.; ผู้ยื่นคำขอและผู้ถือสิทธิบัตร Stavrop สถานะ เกษตรกรรม ยกเลิก - เลขที่ 2007141983/06; ธ.ค. 12.11.07; สาธารณะ 05/27/09.
- แพท. 2320874 สหพันธรัฐรัสเซีย, MPK8 H 02 K 33/12 มอเตอร์เชิงเส้น / Nikitenko G. V. , Grinchenko V. A.; ผู้ยื่นคำขอและผู้ถือสิทธิบัตร Stavrop สถานะ เกษตรกรรม ยกเลิก - เลขที่ 2008112342/09; ธ.ค. 03/31/08; สาธารณะ 20.10.09.
- แพท. 82990 สหพันธรัฐรัสเซีย MPK8 A 01 J 7/00 เครื่องควบคุมสูญญากาศ / Nikitenko G. V. , Grinchenko V. A.; ผู้ยื่นคำขอและผู้ถือสิทธิบัตร Stavrop สถานะ เกษตรกรรม ยกเลิก - เลขที่ 2008150545/22; ธ.ค. 19.12.08; สาธารณะ 05/20/09.
การเปลี่ยนแปลงหลักที่เกิดขึ้นในส่วนของการขับเคลื่อนของเครื่องจักรในช่วงศตวรรษที่ผ่านมานั้นสัมพันธ์กับการค่อยๆ เคลื่อนตัวของเครื่องยนต์ไปสู่ร่างกายที่ทำงาน ด้วยวิธีนี้จะมีกล่องป้อนอาหารขนาดใหญ่ที่มีองค์ประกอบกลางจำนวนมากของโซ่จลนศาสตร์ กระปุกเกียร์สองหรือสามขั้นตอน สายพานขับ ขับตรงผ่านคลัตช์ การเปลี่ยนไปสู่ขั้นต่อไปมักเกี่ยวข้องกับการใช้การพัฒนาทางวิทยาศาสตร์ล่าสุด ซึ่งไม่ทางใดก็ทางหนึ่งได้รับการประยุกต์ใช้ในการสร้างเครื่องมือกล การเกิดขึ้นของเทคโนโลยีใหม่ หรือการลดต้นทุนของเทคโนโลยีที่มีอยู่ ในขั้นต้น ไดรฟ์ที่ใช้มอเตอร์ไฟฟ้าแบบปรับได้และแบบบอลสกรู (บอลสกรู) มีราคาแพงมาก จึงมีผู้ผลิตเพียงไม่กี่รายเท่านั้นที่พบว่ามันคุ้มค่าที่จะใช้ ทุกวันนี้ เป็นเรื่องยากที่จะจินตนาการถึงเครื่องจักรสมัยใหม่ที่จะไม่ใช้บอลสกรู หรือควบคุมอัตราป้อนเป็นขั้นๆ โดยการเคลื่อนบล็อกของเฟือง
ในแต่ละขั้นตอน การออกแบบที่เหมาะสมที่สุดในทุกๆ ด้านไม่เคยปรากฏขึ้นในทันที การปรับปรุงเกิดขึ้นเสมอผ่านการลองผิดลองถูก การปรับปรุงอย่างต่อเนื่องและการกำจัดข้อบกพร่อง ในท้ายที่สุด การกำหนดค่าโหนดที่ผ่านการทดสอบของเวลา การทำงานระยะยาว และพิสูจน์ประสิทธิภาพทางเศรษฐกิจได้แพร่หลายขึ้น

ข้าว. 1. บอลสกรู
การออกแบบที่ได้รับการพิสูจน์มาเป็นอย่างดีและเป็นที่ยอมรับมาอย่างยาวนานดังกล่าว ในปัจจุบันนี้ใช้การขับเคลื่อนโดยใช้บอลสกรูที่เชื่อมต่อกับเครื่องยนต์โดยตรงโดยใช้ข้อต่อ ซึ่งมักใช้สายพานหรือสายพานน้อยกว่า เกียร์รถไฟ. การผลิตองค์ประกอบไดรฟ์ทั้งหมดนั้นใช้เวลานาน เทคโนโลยีได้รับการปรับให้เหมาะสม และราคาจึงค่อนข้างแข่งขันได้
อย่างไรก็ตาม ความปรารถนาของนักออกแบบที่จะลดห่วงโซ่จลนศาสตร์ไม่ได้หายไป ขั้นตอนสุดท้ายในการก้าวข้ามคือบอลสกรู และลิเนียร์มอเตอร์อนุญาตให้ทำเช่นนี้ได้
การใช้มอเตอร์แนวราบในไดรฟ์ป้อนของเครื่องมือเครื่องจักรที่ทันสมัยเป็นผลที่สมเหตุสมผลซึ่งวิวัฒนาการได้นำไปสู่ทศวรรษที่ผ่านมา อย่างไรก็ตาม การใช้ตัวกระตุ้นเชิงเส้นขณะนี้อยู่ในระยะเริ่มต้นเท่านั้น เทคโนโลยีการผลิตของพวกเขายังไม่เป็นระบบอัตโนมัติทั้งหมด ราคาสูงและแอปพลิเคชันยังห่างไกลจากความเหมาะสมเสมอไป มอเตอร์แนวราบยังไม่ได้รับรูปลักษณ์ "อ้างอิง" (หรือรูปลักษณ์ดังกล่าวจำนวนหนึ่ง ทดสอบตามเวลา ซึ่งตัวเลือกนั้นขึ้นอยู่กับลักษณะเฉพาะของการใช้งาน) และมีการออกแบบต่างๆ ที่แม้จะมีข้อดีทั่วไปที่ไม่มีเงื่อนไขหลายประการก็ตาม แตกต่างอย่างมีนัยส าคัญ มีจุดแข็งต่างๆ และ ด้านที่อ่อนแอ. นี่คือขั้นตอนที่นวัตกรรมต้องผ่าน และผู้ผลิตจำนวนมากขึ้นเรื่อยๆ กำลังมุ่งเน้นไปที่มอเตอร์แนวราบสำหรับตัวขับฟีด ทั้งสำหรับอุปกรณ์เฉพาะ เช่น เครื่องจักร EDM และสำหรับเครื่องกัดและกลึง
การใช้มอเตอร์แนวราบนั้นเหมาะสมสำหรับอุปกรณ์ที่มีความแม่นยำและเมื่อ การตอบสนองแบบไดนามิกไดรฟ์: อัตราเร่งสูงสุดที่อนุญาต, ค่าความเร็วสูงสุดและต่ำสุดที่อนุญาต อย่างไรก็ตามแม้สำหรับอุปกรณ์ของคลาสนี้ ไดรฟ์เชิงเส้นมักติดตั้งเพื่อวัตถุประสงค์ทางการตลาดเท่านั้น เนื่องจากอุปกรณ์ที่มีความแม่นยำสูงโดยค่าเริ่มต้นควร "ยัด" ด้วยนวัตกรรมที่ช่วยให้บรรลุความแม่นยำสูงสุดซึ่งคู่แข่งไม่สามารถเข้าถึงได้ ในขณะเดียวกันก็ลืมไปว่า ประสิทธิภาพทางเศรษฐกิจการใช้ไดรฟ์ดังกล่าวซึ่งนำไปสู่การเพิ่มขึ้นอย่างไม่ยุติธรรมในต้นทุนการประมวลผลและความจำเป็นทางเทคโนโลยีของโซลูชันดังกล่าวโดยรวม
จากที่กล่าวมาข้างต้น กลยุทธ์ที่บริษัทเลือกนั้นน่าสังเกต Mitsubishi Electric. กว่า 40 ปีที่ผ่านมา บริษัทได้เปิดตัวเครื่องตัดลวด EDM เครื่องแรก และในปี 1978 ซึ่งเป็นเครื่องตัดลวด EDM แบบ 4 แกนความเร็วสูงและความแม่นยำสูงแบบอนุกรม

ข้าว. 2.มิตซูบิชิ NA1200
ทุกวันนี้ ความรู้ที่สั่งสมมาเป็นเวลาหลายทศวรรษ ประกอบกับงานวิจัยที่เข้มข้น ยังคงเป็นเกณฑ์ชี้ขาดในการพัฒนาระบบ EDM ใหม่ ในฐานะหนึ่งในผู้ผลิตอุปกรณ์ EDM ชั้นนำและในขณะเดียวกันก็เป็นหนึ่งใน ผู้ผลิตรายใหญ่ที่สุดมอเตอร์เชิงเส้น, บริษัทญี่ปุ่นจนกระทั่งเมื่อเร็วๆ นี้ ฉันไม่ได้ติดตั้งมันในเครื่องของฉัน เฉพาะในปี 2009 เท่านั้น ลิเนียร์มอเตอร์ (ทรงกระบอก) ถูกใช้เป็นครั้งแรกบนเครื่องจักรของซีรีส์ NA (รูปที่ 2) คำถามเกิดขึ้นว่าทำไมบริษัทยักษ์ใหญ่ปฏิเสธที่จะใช้ส่วนประกอบของตัวเองในอุปกรณ์ แม้ว่าส่วนประกอบเหล่านี้ (มอเตอร์เชิงเส้น) จะขายได้ทั่วโลกอย่างประสบความสำเร็จ?
ควรพิจารณาการออกแบบเฉพาะอย่างใกล้ชิดเพื่อให้ได้คำตอบสำหรับคำถามนี้
จนถึงปัจจุบัน เครื่องมือเครื่องจักรงานโลหะที่พบมากที่สุดคือมอเตอร์เชิงเส้นตรงแบบเรียบ แผนผังของเครื่องยนต์ดังกล่าวแสดงในรูปที่ 3.
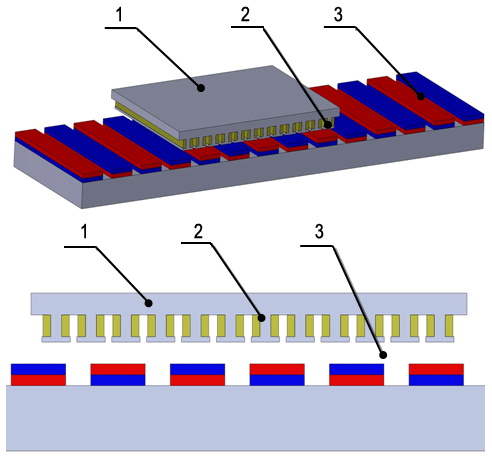
ข้าว. 3. มอเตอร์เชิงเส้นแบน: แผนภาพวงจร
เครื่องยนต์ประกอบด้วยสองส่วนหลัก: สไลเดอร์ซึ่งเป็นแกนหลัก 1 พร้อมขดลวด 2 และชิ้นส่วนคงที่พร้อมแม่เหล็กถาวร 3
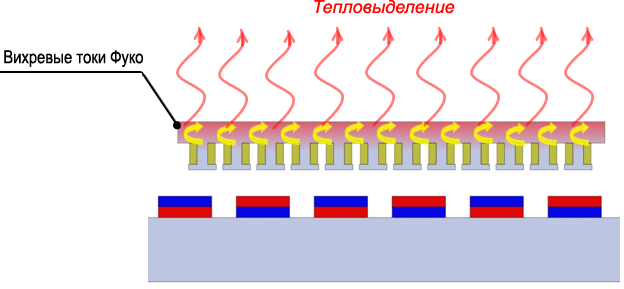
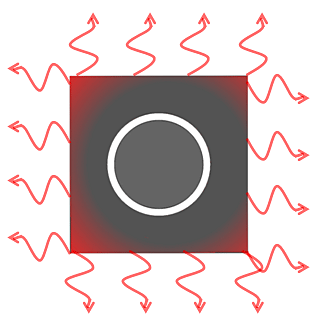
เป็นการมีอยู่ของแก่นซึ่งเป็นที่มาของลักษณะเฉพาะ ประเภทนี้ข้อเสียของเครื่องยนต์:
พิจารณาตอนนี้ลิเนียร์มอเตอร์ที่บริษัทใช้ Mitsubishi Electric. ในเครื่อง Mitsubishi NA 1200 ที่มีความแม่นยำสูงจะใช้แกน X, Y, U, V เป็นไดรฟ์ มอเตอร์เชิงเส้นทรงกระบอก
แผนผังของมอเตอร์เชิงเส้นทรงกระบอกแสดงในรูปที่ 12. ลักษณะเฉพาะของการออกแบบคือขดลวด 2 ตั้งอยู่รอบรูปทรงกระบอก แม่เหล็กถาวร 1 แต่ไม่มีหลักในหลักการ!
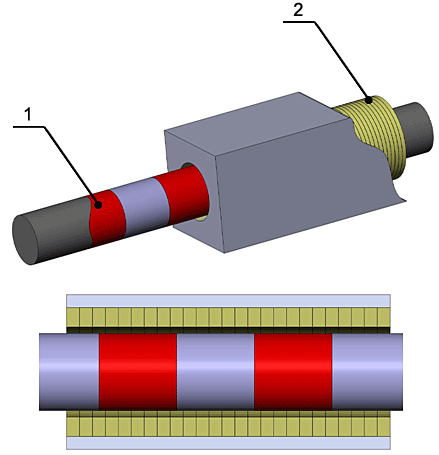
ข้าว. 12. มอเตอร์เชิงเส้นทรงกระบอก: แผนภาพวงจร
มอเตอร์เชิงเส้นตรงทรงกระบอกเนื่องจากการออกแบบไม่มีข้อเสียทั้งหมดของมอเตอร์เชิงเส้นตรงแบบเรียบที่กล่าวถึงข้างต้น ลองมาดูที่แต่ละของพวกเขา
กลับมาที่คำถามในตอนต้นกัน: ทำไมลิเนียร์มอเตอร์ถึงปรากฎในรถมิตซูบิชิเมื่อไม่นานนี้เอง? ตอนนี้คำตอบนั้นง่ายกว่ามาก

ข้าว. 18.Mitsubishi MV1200R
เห็นได้ชัดว่าผู้เชี่ยวชาญของ บริษัท เพื่อประโยชน์ของความปรารถนาที่จะอยู่บนยอดคลื่นแห่งความก้าวหน้าทางเทคนิคไม่ได้ให้ความสำคัญกับมอเตอร์แนวราบเรียบซึ่งไม่เหมาะกับพวกเขาเป็นหลักในแง่ของตัวชี้วัดทางเศรษฐกิจ: ต้นทุนของตัวเองสูง , ราคาสูงการดำเนินงานและการซ่อมแซมซึ่งจะถูกโอนไปยังต้นทุนของชิ้นส่วนที่ได้รับบนเครื่องอย่างหลีกเลี่ยงไม่ได้ จนกว่าการใช้บอลสกรูไดรฟ์แบบคลาสสิกจะมีความสมเหตุสมผลในเชิงเศรษฐกิจ และในขณะเดียวกันก็อนุญาตให้มีความแม่นยำในการตัดเฉือนสูงสุด วิศวกรของบริษัทมองว่ามอเตอร์แนวราบจะทำงานอย่างไรเมื่อเทียบกับเครื่องจักร EDM จึงพบวิธีแก้ไข มอเตอร์แนวราบชนิดที่ค่อนข้างใหม่ได้ปรากฏตัวในตลาด - มอเตอร์เชิงเส้นทรงกระบอก (CLM) ซึ่งมีข้อดีหลายประการเมื่อเทียบกับแอนะล็อกและมีประสิทธิภาพมากจากมุมมองทางเศรษฐกิจ: ใช้พลังงานต่ำ ความสะดวกในการผลิตและการประกอบ . ข้อบกพร่องทั้งหมดของมอเตอร์เชิงเส้นตรงที่กล่าวถึงข้างต้น ไม่ใช่ลักษณะของทรงกระบอก.
ในปี 2552 มีการเปิดตัวเครื่องจักร NA ที่มีความแม่นยำสูงเป็นพิเศษพร้อม CLD ในการผลิต เครื่องจักรเหล่านี้ได้รับการพิสูจน์แล้วว่ายอดเยี่ยมและทำให้ผู้เชี่ยวชาญชาวญี่ปุ่นนึกถึงความทันสมัยของเครื่องจักรอื่นๆ ที่ผลิตโดยบริษัท ในเดือนมีนาคม 2555 Mitsubishi Electric ประกาศเริ่มการผลิต ซีรีส์ใหม่ MV ร่วมกับ CLD และสาธิตเครื่องจักรเหล่านี้ที่นิทรรศการ INTERMOLD 2012 ที่โอซาก้า (ประเทศญี่ปุ่น) MV ซีรีส์ออกแบบมาเพื่อแทนที่ซีรีส์ FA และ BA ที่พิสูจน์แล้ว ในขณะที่เครื่องจักรใหม่มีความสามารถในการประมวลผลที่ยอดเยี่ยมและความแม่นยำที่ยอดเยี่ยม ข้อได้เปรียบหลักคือประสิทธิภาพทางเศรษฐกิจและต้นทุนการดำเนินการที่ต่ำมาก ต้องขอบคุณการใช้ CLD เป็นหลัก ทำให้เครื่องจักรซีรีส์ MV ใช้พลังงานน้อยกว่ารุ่นก่อนถึง 69% และลดต้นทุนการตัดเฉือนลง 42% โดยใช้เวลาน้อยลง 30%! นี่เป็นผลลัพธ์ที่น่าทึ่งอย่างแท้จริง ซึ่งทำให้เราสามารถยืนยันได้ว่า CLD จะยังคงถูกใช้อย่างประสบความสำเร็จในเครื่องมือกลของ Mitsubishi Electric ต่อไป
การใช้ CLD จำเป็นต้องมีการพัฒนาและประยุกต์ใช้มากที่สุด เทคโนโลยีขั้นสูงควบคุมโดยใช้การสื่อสารใยแก้วนำแสงความเร็วสูงพิเศษและการสื่อสารระบบแบบเรียลไทม์ รอเราอยู่แน่นอน ปรับปรุงต่อไปการออกแบบและควบคุมระบบ แต่ถึงแม้ตอนนี้เราสามารถพูดได้อย่างมั่นใจว่าการใช้ CLD ในเครื่องอิเล็กโตรโรซีฟเป็นโซลูชั่นที่เป็นนวัตกรรมใหม่ที่ทำเครื่องหมาย เวทีใหม่วิวัฒนาการในอุตสาหกรรมเครื่องมือกล
1. บทนำ.
2. มอเตอร์แบบอะซิงโครนัสเชิงเส้น
2.1 การออกแบบและหลักการทำงาน
2.2 พันธุ์.
2.2.2 เครื่องยนต์อาร์ค
2.2.3 เครื่องยนต์ท่อ
2.3 การสมัคร
3. มอเตอร์เชิงเส้นตรง
3.1 การออกแบบและหลักการทำงาน
3.2 การสมัคร
4. มอเตอร์ซิงโครนัสเชิงเส้น
4.1 การสมัคร
5. สรุป.
1. บทนำ.
โอกาสที่น่าสนใจและกว้างสำหรับการพัฒนาไดรฟ์ไฟฟ้านั้นเกี่ยวข้องกับการใช้มอเตอร์เชิงเส้นที่เรียกว่า
กลไกการผลิตและอุปกรณ์จำนวนมากมีการเคลื่อนที่แบบแปลนหรือแบบลูกสูบ (เครื่องจักรสำหรับยกและขนย้าย กลไกการป้อนของเครื่องมือกลต่างๆ เครื่องอัด ค้อน ฯลฯ) กลไกและอุปกรณ์เหล่านี้ถูกใช้เป็นตัวขับเคลื่อน มอเตอร์ไฟฟ้าทั่วไปร่วมกับการส่งสัญญาณทางกลชนิดพิเศษ (กลไกข้อเหวี่ยง, การส่งกำลังด้วยน็อตสกรู) ซึ่งเปลี่ยนการเคลื่อนที่แบบหมุนของตัวเครื่อง
มอเตอร์เชิงเส้นอาจเป็นแบบอะซิงโครนัส ซิงโครนัส และกระแสตรง โดยทำซ้ำมอเตอร์เคลื่อนที่แบบหมุนที่สอดคล้องกันตามหลักการของการกระทำ
2. มอเตอร์แบบอะซิงโครนัสเชิงเส้น
2.1 การออกแบบและหลักการทำงาน
มอเตอร์เชิงเส้นแบบอะซิงโครนัสที่แพร่หลายมากที่สุด สามารถรับแนวคิดของอุปกรณ์ของมอเตอร์เหนี่ยวนำเชิงเส้นได้หากคุณตัดทางจิตใจ (รูปที่ 1) สเตเตอร์ 1 และโรเตอร์ 4 พร้อมขดลวด 2 และ 3 ของมอเตอร์เหนี่ยวนำธรรมดาตามแกนตามแนวกำเนิดแล้วหมุน ขึ้นเครื่องบินตามภาพ การออกแบบ "แบน" ที่ได้คือ แผนภูมิวงจรรวมมอเตอร์เชิงเส้น หากตอนนี้ขดลวดสเตเตอร์ 2 ของเครื่องยนต์ดังกล่าวเชื่อมต่อกับเครือข่ายกระแสสลับจะเกิดสนามแม่เหล็กขึ้นซึ่งแกนจะเคลื่อนที่ไปตามช่องว่างอากาศด้วยความเร็วเป็นสัดส่วนกับความถี่ของแรงดันไฟฟ้าและความยาวของ การแบ่งขั้ว สนามแม่เหล็กนี้เคลื่อนที่ไปตามช่องว่างข้ามตัวนำของขดลวด 3 ของโรเตอร์และเหนี่ยวนำให้เกิด EMF ในนั้นภายใต้อิทธิพลของกระแสที่กระแสจะเริ่มไหลผ่านขดลวด ปฏิกิริยาของกระแสกับสนามแม่เหล็กจะนำไปสู่ การปรากฏตัวของอำนาจทำหน้าที่ตามกฎของ Lenz ที่รู้จักกันดีในทิศทางของการเคลื่อนที่ของสนามแม่เหล็ก โรเตอร์ - ต่อไปนี้เราจะเรียกมันว่าองค์ประกอบรอง - ภายใต้อิทธิพลของแรงนี้จะเริ่มเคลื่อนที่ด้วยความล่าช้า (เลื่อน) จากสนามแม่เหล็กเช่นเดียวกับในมอเตอร์แบบอะซิงโครนัสทั่วไป
2.2 พันธุ์.
2.2.1 พารามิเตอร์การออกแบบ
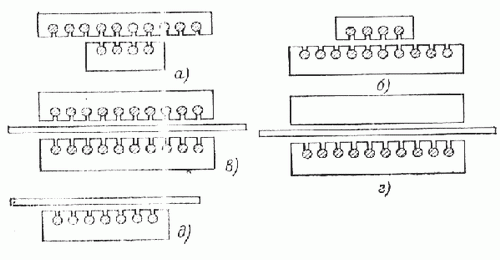
แสดงในรูป 2 การออกแบบเป็นมอเตอร์เชิงเส้นที่มีขนาดเท่ากันของสเตเตอร์และองค์ประกอบรอง นอกเหนือจากการออกแบบนี้แล้ว องค์ประกอบรองอาจยาวกว่าสเตเตอร์ (รูปที่ 2a) หรือสั้นกว่านั้น (รูปที่ 2b) ทั้งนี้ขึ้นอยู่กับวัตถุประสงค์ของมอเตอร์เชิงเส้น มอเตอร์ดังกล่าวเรียกว่ามอเตอร์ที่มีสเตเตอร์สั้นและองค์ประกอบรองสั้น องค์ประกอบรองของมอเตอร์เชิงเส้นไม่ได้มาพร้อมกับขดลวดเสมอไป บ่อยครั้ง - และนี่คือข้อดีอย่างหนึ่งของมอเตอร์เหนี่ยวนำเชิงเส้น - แผ่นโลหะ (แถบ) ถูกใช้เป็นองค์ประกอบรองดังแสดงในรูปที่ 2d. ในกรณีนี้ องค์ประกอบรองยังสามารถอยู่ระหว่างสองสเตเตอร์ (รูปที่ 2c) หรือระหว่างสเตเตอร์กับแกนเฟอร์โรแมกเนติก (รูปที่ 2d) เครื่องยนต์ที่มีไดอะแกรมโครงสร้างแสดงในรูปที่ 2d เรียกว่ามอเตอร์ที่มีสเตเตอร์ด้านเดียวพร้อมไดอะแกรมตามรูปที่ 2c - มีสเตเตอร์สองด้านและวงจรตามรูปที่ 2d - มีสเตเตอร์และแกนด้านเดียว องค์ประกอบทุติยภูมิทำจากทองแดง อะลูมิเนียม หรือเหล็กกล้า และการใช้องค์ประกอบทุติยภูมิที่ไม่ใช่แม่เหล็กเกี่ยวข้องกับการใช้รูปแบบการออกแบบที่มีฟลักซ์แม่เหล็กปิดผ่านองค์ประกอบที่เป็นเฟอร์โรแมกเนติก เช่น ในรูปที่ 2c และ 2d องค์ประกอบทุติยภูมิคอมโพสิตที่ซับซ้อนซึ่งมีแถบวัสดุที่ไม่ใช่แม่เหล็กและวัสดุที่เป็นเฟอร์โรแมกเนติกอยู่ติดกันในขณะที่แถบเฟอร์โรแมกเนติกทำหน้าที่เป็นส่วนหนึ่งของวงจรแม่เหล็กค่อนข้างแพร่หลาย หลักการทำงานของมอเตอร์เชิงเส้นตรงที่มีองค์ประกอบทุติยภูมิในรูปแบบของแถบนั้นทำซ้ำการทำงานของมอเตอร์แบบอะซิงโครนัสแบบธรรมดาที่มีโรเตอร์แบบแม่เหล็กขนาดใหญ่หรือแบบกลวงที่ไม่ใช่แบบแม่เหล็ก ขดลวดสเตเตอร์ของมอเตอร์เชิงเส้นมีรูปแบบการเชื่อมต่อเหมือนกับมอเตอร์แบบอะซิงโครนัสทั่วไป และมักจะเชื่อมต่อกับเครือข่ายกระแสสลับสามเฟส โปรดทราบว่ามอเตอร์แนวราบมักทำงานในโหมดการเคลื่อนที่แบบกลับหัว เมื่อองค์ประกอบรองอยู่กับที่ และสเตเตอร์เคลื่อนที่ มอเตอร์แนวราบที่เรียกว่ามอเตอร์สเตเตอร์เคลื่อนที่พบการใช้งานที่หลากหลายในยานพาหนะไฟฟ้าโดยเฉพาะ
2.2.2 เครื่องยนต์อาร์ค
มอเตอร์อาร์คมีลักษณะเฉพาะตามตำแหน่งของขดลวดในส่วนของวงกลมดังแสดงในรูปที่ 3. คุณลักษณะของเครื่องยนต์นี้คือการพึ่งพาความเร็วในการหมุนของสเตเตอร์ 1 กับความยาวของส่วนโค้งที่ขดลวด 2 ของสเตเตอร์ 3 ตั้งอยู่
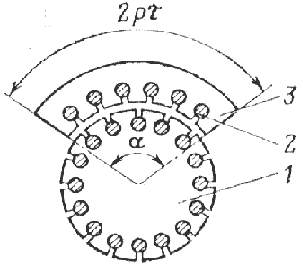
ให้ขดลวดสเตเตอร์ตั้งอยู่บนส่วนโค้งซึ่งมีความยาวสอดคล้องกับมุมศูนย์กลาง α = 2τr โดยที่ τ คือความยาวของการแบ่งขั้วและ p คือจำนวนคู่ของเสา จากนั้น ในช่วงเวลาปัจจุบัน สนามสเตเตอร์ที่หมุนอยู่จะเลี้ยวผ่านมุม 2 τр/р = α/р และภายในหนึ่งนาที สนามจะหมุนรอบ n = α/p*60f/2π รอบ นั่นคือ มันจะมี ความถี่ในการหมุน n, ประมาณ /นาที
ด้วยการเลือก α ที่แตกต่างกัน ทำให้สามารถสร้างมอเตอร์อาร์คที่มีความเร็วโรเตอร์ต่างกันได้
2.2.3 เครื่องยนต์ท่อ
การออกแบบมอเตอร์เชิงเส้นแบบท่อแสดงในรูปที่ สี่.
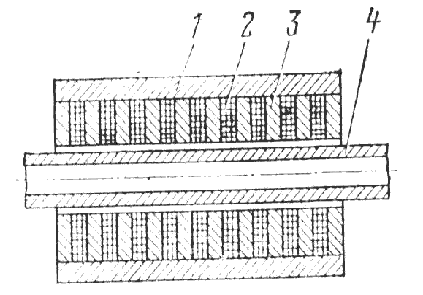
สเตเตอร์ของมอเตอร์ 1 มีรูปแบบของท่อภายในซึ่งมีขดลวดแบน 2 (ขดลวดสเตเตอร์) เป็นระยะ ๆ และแหวนโลหะ 3 ซึ่งเป็นส่วนหนึ่งของวงจรแม่เหล็ก ขดลวดมอเตอร์เชื่อมต่อเป็นกลุ่มและสร้างขดลวดของมอเตอร์แต่ละเฟส ภายในสเตเตอร์วางองค์ประกอบรอง 4 ยังเป็นท่อซึ่งทำจากวัสดุที่เป็นเหล็ก
เมื่อขดลวดสเตเตอร์เชื่อมต่อกับเครือข่าย สนามแม่เหล็กเคลื่อนที่จะก่อตัวขึ้นตามพื้นผิวด้านใน ซึ่งจะเหนี่ยวนำกระแสในร่างกายขององค์ประกอบทุติยภูมิโดยมุ่งไปตามเส้นรอบวง ปฏิกิริยาของกระแสเหล่านี้กับสนามแม่เหล็กของมอเตอร์จะสร้างแรงที่กระทำตามท่อบนองค์ประกอบรอง ซึ่งทำให้ (โดยที่สเตเตอร์คงที่) การเคลื่อนที่ขององค์ประกอบทุติยภูมิในทิศทางนี้ การออกแบบมอเตอร์เชิงเส้นแบบท่อมีลักษณะเป็นแนวแกนของฟลักซ์แม่เหล็ก ตรงกันข้ามกับมอเตอร์เชิงเส้นตรงแบบแบน ซึ่งฟลักซ์แม่เหล็กมีทิศทางในแนวรัศมี
2.3 การสมัคร
มอเตอร์แนวราบพบว่ามีการใช้งานอย่างกว้างขวางในการขนส่งทางไฟฟ้า ซึ่งอำนวยความสะดวกโดย ทั้งสายข้อดีของเครื่องยนต์เหล่านี้ หนึ่งในนั้นที่กล่าวไว้ข้างต้นถูกกำหนดโดยความตรงของการเคลื่อนที่ขององค์ประกอบรอง (หรือสเตเตอร์) ซึ่งรวมเข้ากับธรรมชาติของการเคลื่อนที่ของยานพาหนะอย่างเป็นธรรมชาติ
อีกกรณีหนึ่งที่สำคัญไม่น้อยที่เกี่ยวข้องกับความเป็นอิสระของแรงฉุดลากจากแรงยึดเกาะของล้อไปยังรางรถไฟ ซึ่งไม่สามารถบรรลุได้สำหรับระบบลากจูงไฟฟ้าทั่วไป ดังนั้นการเร่งความเร็วและความเร็วของยานพาหนะเมื่อใช้มอเตอร์แนวราบสามารถสูงได้ตามอำเภอใจและถูก จำกัด ด้วยความสะดวกสบายในการเคลื่อนไหวเท่านั้นความเร็วล้อที่อนุญาตของล้อบนรางรถไฟและถนน เสถียรภาพแบบไดนามิกวิ่งเกียร์ของการขนส่งและวิธี ไม่รวมเมื่อใช้มอเตอร์เชิงเส้นและการลื่นไถลของล้อรถยนต์ไฟฟ้า
หนึ่งในแผนการออกแบบที่เป็นไปได้สำหรับการประกบมอเตอร์เชิงเส้นกับมอเตอร์ราง ยานพาหนะแสดงในรูป 5.
มอเตอร์แนวราบที่ติดตั้งอยู่บนโบกี้ 3 ของสต็อกกลิ้งมีการออกแบบที่มีสเตเตอร์แบบสองด้าน 1 องค์ประกอบรองคือแถบ 2 ที่ยึดระหว่างราง แรงดันไฟฟ้าถูกนำไปใช้กับสเตเตอร์ของมอเตอร์โดยใช้หน้าสัมผัสแบบเลื่อน การออกแบบมอเตอร์เชิงเส้นยังเป็นที่รู้จักกันในนาม โดยองค์ประกอบรองคือรางและองค์ประกอบของโครงสร้างรองรับ แผนดังกล่าวเป็นเรื่องปกติโดยเฉพาะอย่างยิ่งสำหรับผู้โดยสารโมโนเรลและ ถนนขนส่งสินค้าและกลไกการเคลื่อนย้ายเครน ในรูป 6 แสดงเป็นตัวอย่างมอเตอร์เชิงเส้นภายในประเทศที่ออกแบบมาสำหรับโมโนเรล มอเตอร์นี้มีสเตเตอร์สองด้าน 1 ที่มีขดลวด 2 ซึ่งภายในมีองค์ประกอบรองในรูปแบบของแถบ 3 สเตเตอร์ของมอเตอร์เคลื่อนที่ไปตามแถบโดยใช้ลูกกลิ้งแบริ่ง 5. ลูกกลิ้ง 4 ทำหน้าที่ร่วมกัน แก้ไขสเตเตอร์และองค์ประกอบรองในแนวนอน
ข้าว. 6

ข้าว. 7
ในรูป 7 แสดงตัวอย่างการใช้มอเตอร์แบบอะซิงโครนัสเชิงเส้นสำหรับกลไกการขนส่งสินค้าของผลิตภัณฑ์ต่างๆ
สายพานลำเลียงที่ออกแบบมาเพื่อเคลื่อนย้ายวัสดุจำนวนมาก 1 จากฮ็อปเปอร์ 2 มีสายพานโลหะ 3 ติดอยู่ที่ดรัม 4 สายพานโลหะจะผ่านเข้าไปในสเตเตอร์ 5 ของมอเตอร์เชิงเส้นซึ่งเป็นองค์ประกอบรอง การใช้มอเตอร์แนวราบในกรณีนี้ช่วยลดความตึงเบื้องต้นของสายพานและขจัดการเลื่อนหลุด เพิ่มความเร็วและความน่าเชื่อถือของสายพานลำเลียง
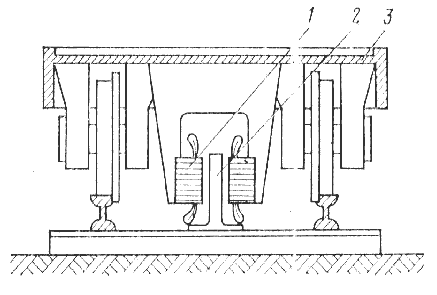
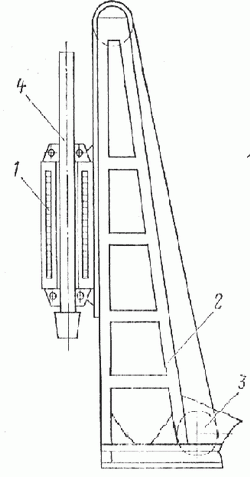
สิ่งที่น่าสนใจอย่างยิ่งคือการใช้มอเตอร์แนวราบสำหรับเครื่องเพอร์คัชชัน เช่น ค้อนตอกเสาเข็มที่ใช้ใน งานถนนและการก่อสร้าง แผนภาพโครงสร้างของค้อนดังกล่าวแสดงในรูปที่ 8. สเตเตอร์ของมอเตอร์เชิงเส้น 1 ตั้งอยู่บนบูมค้อน 2 และสามารถเคลื่อนที่ไปตามไกด์บูมในแนวตั้งโดยใช้เครื่องกว้าน 3 ส่วนกระแทกของค้อน 4 ยังเป็นองค์ประกอบรองของเครื่องยนต์ .
ในการยกส่วนกระแทกของค้อน เครื่องยนต์จะเปิดขึ้นเพื่อให้สนามวิ่งพุ่งขึ้นไปข้างบน เมื่อส่วนช็อตเข้าใกล้สุดขีด ตำแหน่งสูงสุดเครื่องยนต์ดับลงและชิ้นส่วนโช้คตกลงสู่กองภายใต้การกระทำของแรงโน้มถ่วง ในบางกรณี เครื่องยนต์จะไม่ดับ แต่กลับด้าน ซึ่งทำให้คุณสามารถเพิ่มพลังงานกระแทกได้ ในขณะที่เสาเข็มลึกขึ้น มอเตอร์สเตเตอร์จะเลื่อนลงโดยใช้เครื่องกว้าน
ข้าว. แปด
ค้อนไฟฟ้าผลิตได้ง่าย ไม่ต้องการความแม่นยำที่เพิ่มขึ้นในการผลิตเครื่องยนต์ ไม่ไวต่อการเปลี่ยนแปลงของอุณหภูมิ และสามารถเริ่มทำงานได้ทันที
3. มอเตอร์เชิงเส้นตรง
มอเตอร์เชิงเส้นตรงแบบอะซิงโครนัสยังใช้ควบคู่กับมอเตอร์เชิงเส้นตรงแบบอะซิงโครนัส ส่วนใหญ่มักใช้เพื่อให้ได้การเคลื่อนไหวเล็ก ๆ ขององค์ประกอบการทำงานและในขณะเดียวกันก็ให้ความแม่นยำสูงและแรงเริ่มต้นที่สำคัญ
3.1 การออกแบบและหลักการทำงาน
มอเตอร์ DC เชิงเส้นประกอบด้วยเกราะที่มีขดลวดซึ่งทำหน้าที่เป็นตัวสะสม (องค์ประกอบนำทาง) พร้อมกันและวงจรแม่เหล็กเปิดที่มีขดลวดกระตุ้น (ส่วนที่เคลื่อนที่) อยู่เพื่อให้เวกเตอร์ของแรงที่เกิดขึ้นภายใต้เสาของ วงจรแม่เหล็กมีทิศทางเดียวกัน นอกจากนี้ มอเตอร์กระแสตรงเชิงเส้นตรง (เช่นเดียวกับมอเตอร์เคลื่อนที่แบบหมุน) ยังช่วยให้ปรับความเร็วของการเคลื่อนที่ของชิ้นงานได้หากจำเป็น
3.2 การสมัคร
ในรูป 9 แสดงไดอะแกรมของมอเตอร์กระแสตรงเชิงเส้น ซึ่งใช้ในการเคลื่อนย้ายผลิตภัณฑ์อุตสาหกรรม โดยพื้นฐานแล้วมอเตอร์นี้เป็นมอเตอร์กระแสตรงที่มีกระดองทรงกระบอกกลวง ตัดตาม generatrix และนำไปใช้ในระนาบ
ข้าว. 9
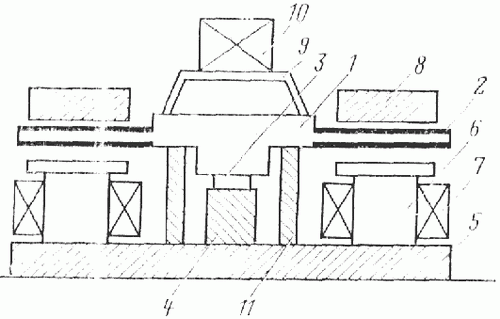
ส่วนที่เคลื่อนที่ได้ของเครื่องยนต์ - กระดอง - ประกอบด้วยแกนที่ไม่ใช่แม่เหล็ก 1 และขดลวดกระดอง 2 ติดอยู่กับมัน ซึ่งสามารถทำจากลวดขดลวดหุ้มฉนวนหรือทำจากฟอยล์ทองแดงโดยการแกะสลัก ความกว้างของขดลวดหมุนไปในทิศทางของการเคลื่อนที่ เช่นเดียวกับในมอเตอร์กระแสตรงทั่วไป ซึ่งอยู่ใกล้กับการแบ่งขั้ว (กล่าวคือ ระยะห่างเส้นรอบวงระหว่างขั้วของระบบแม่เหล็กของมอเตอร์) ตัวนำไปยังขดลวดจะดำเนินการโดยใช้ตัวสะสม 3 และแปรง 4 ชุดของเสา 6 ที่มีขดลวดกระตุ้น 7 วางเรียงเป็นแถวในทิศทางของการเคลื่อนที่ของกระดอง ติดตั้งบนโครงมอเตอร์ 5 ส่วนอื่น ๆ ของวงจรแม่เหล็กของมอเตอร์คือแกนเหล็ก 8 และตัวเฟรมเองซึ่งทำจากวัสดุที่เป็นเฟอร์โรแมกเนติกด้วย เกราะของมอเตอร์พร้อมกับตารางที่ 9 สำหรับยึดผลิตภัณฑ์ที่เคลื่อนไหว 10 เคลื่อนที่ไปตามส่วนรองรับคงที่ 11 เพื่อให้ระนาบที่มีขดลวดอยู่ในช่องว่างระหว่างแกน 8 และเสา 6 เสมอ การทำงานของมอเตอร์เชิงเส้น ขึ้นอยู่กับการทำงานของปั๊มพิเศษสำหรับสูบของเหลวที่นำไฟฟ้าและรวมถึงโลหะเหลว ปั๊มดังกล่าว ซึ่งมักเรียกกันว่าปั๊มแมกนีโตไฮโดรไดนามิก มีการใช้กันอย่างแพร่หลายในด้านโลหะวิทยาสำหรับการขนส่ง การตวงและการผสมของโลหะเหลว ตลอดจนในโรงไฟฟ้านิวเคลียร์เพื่อสูบน้ำหล่อเย็นโลหะเหลว
ปั๊มแมกนีโตไฮโดรไดนามิก (MHD - ปั๊ม) สามารถเป็นกระแสตรงหรือกระแสสลับได้ พิจารณาวงจรปั๊มกระแสตรง
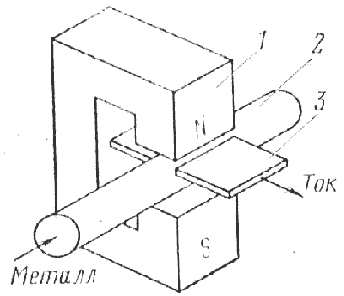
องค์ประกอบหลัก - สเตเตอร์ของมอเตอร์คือแม่เหล็กไฟฟ้ารูปตัว C 1 ท่อ 2 ที่มีโลหะเหลววางอยู่ในช่องว่างอากาศของแม่เหล็กไฟฟ้า ด้วยความช่วยเหลือของอิเล็กโทรด 3 เชื่อมกับผนังของท่อส่งผ่าน โลหะเหลวกระแสตรงถูกส่งผ่านจากอุปกรณ์ภายนอก บ่อยครั้งที่ขดลวดกระตุ้นเชื่อมต่อแบบอนุกรมกับวงจรของอิเล็กโทรด 3 เมื่อแม่เหล็กไฟฟ้าถูกกระตุ้น แรงแม่เหล็กไฟฟ้าจะเริ่มทำปฏิกิริยากับโลหะในโซนของทางเดินกระแสตรง ภายใต้อิทธิพลของแรงนี้ โลหะจะเริ่มเคลื่อนที่ไปตามท่อ และทิศทางของการเคลื่อนที่สามารถกำหนดได้อย่างง่ายดายโดยกฎมือซ้ายที่รู้จักกันดี ข้อดีของปั๊ม MHD คือไม่มีการเคลื่อนย้าย ชิ้นส่วนเครื่องจักรกลและความเป็นไปได้ของการปิดผนึกช่องทางการขนส่งโลหะ
4. มอเตอร์ซิงโครนัสเชิงเส้น
ที่ ปีที่แล้วมอเตอร์เชิงเส้นตรงแบบซิงโครนัสถูกใช้งานมากขึ้นเรื่อยๆ พื้นที่หลักของการใช้งานของเครื่องยนต์เหล่านี้ซึ่งข้อดีของพวกเขาเด่นชัดที่สุดคือความเร็วสูง การขนส่งทางไฟฟ้า. ความจริงก็คือภายใต้สภาวะการทำงานปกติของการขนส่งดังกล่าว จำเป็นต้องมีช่องว่างอากาศที่ค่อนข้างใหญ่ระหว่างส่วนที่เคลื่อนไหวและองค์ประกอบรอง ในกรณีนี้ มอเตอร์เชิงเส้นแบบอะซิงโครนัสมีตัวประกอบกำลังที่ต่ำมาก และการใช้งานนั้นไม่สามารถทำได้ในเชิงเศรษฐกิจ ในทางกลับกัน มอเตอร์เชิงเส้นตรงแบบซิงโครนัส ทำให้เกิดช่องว่างอากาศที่ค่อนข้างใหญ่ระหว่างสเตเตอร์และองค์ประกอบรอง และด้วยเหตุนี้จึงทำงานด้วยตัวประกอบกำลังที่ใกล้เคียงกับความสามัคคี
ควรสังเกตว่าการใช้มอเตอร์เชิงเส้นแบบซิงโครนัสในการขนส่งด้วยความเร็วสูงนั้นถูกรวมเข้ากับระบบกันสะเทือนแบบแม่เหล็กที่เรียกว่ารถยนต์และการใช้แม่เหล็กตัวนำยิ่งยวดและขดลวดกระตุ้นซึ่งทำให้เพิ่มความสะดวกสบาย ของการเคลื่อนไหวและประสิทธิภาพทางเศรษฐกิจของหุ้นรีด
4.1 การสมัคร
ในรูป หมายเลข 11 แสดงแผนภาพสะพานลอยและรถยนต์ไฟฟ้าที่มีความเร็ว 400–500 กม./ชม. ออกแบบมาเพื่อรองรับผู้โดยสารได้ 100 คน

ข้าว. สิบเอ็ด
มอเตอร์แนวราบซิงโครนัสการยึดเกาะถูกกระตุ้นด้วยแม่เหล็กไฟฟ้าโดยใช้แม่เหล็กตัวนำยิ่งยวด ขดลวดกระตุ้น 1 ประกอบด้วยแถวของขดลวดที่ยึดติดอยู่ใต้ท้องรถอย่างสม่ำเสมอ 5. ฮีเลียมเหลวใช้ในระบบทำความเย็นด้วยความเย็นของขดลวด ขดลวดสามเฟสแบบแบนของอินเวอร์เตอร์แปรผันที่แปลงแรงดันไฟฟ้ากระแสตรงเป็นแรงดันไฟฟ้ากระแสสลับสามเฟส
อินเวอร์เตอร์ใช้สำหรับสตาร์ท เปลี่ยนความเร็ว และเบรกรถไฟ
สะพาน 6 เป็นผืนผ้าใบคอนกรีตซึ่งเลือกพื้นผิวเรียบเพื่อลดการสะสมของน้ำแข็งและหิมะ รถถูกระงับเหนือพื้นถนนที่ความสูง 15 ซม. โดยใช้ระบบกันสะเทือนแบบแม่เหล็กพิเศษ ระบบนี้ประกอบด้วยแม่เหล็กไฟฟ้าตัวนำยิ่งยวดแบบยาว 3 ซึ่งติดตั้งอยู่ที่ขอบด้านล่างของรถ โดยใช้แถบอะลูมิเนียมแบน 4 ยึดอยู่กับพื้นถนน หลักการทำงานของระบบกันสะเทือนแบบแม่เหล็กขึ้นอยู่กับการกระทำของแรงอิเล็กโทรไดนามิกที่เกิดจากปฏิกิริยาของกระแสแม่เหล็กไฟฟ้าตัวนำยิ่งยวด 3 บนรถและกระแสน้ำวนที่เกิดจากแถบอะลูมิเนียม 4. การคำนวณพบว่าเมื่อใช้ระบบกันสะเทือนแบบแม่เหล็ก น้ำหนัก ของรถน้อยกว่าระบบเบาะลมถึง 20 ตัน
เพื่อให้ ความเสถียรของม้วนรถไฟระหว่างการเคลื่อนไหวจะใช้ระบบรักษาเสถียรภาพพิเศษ จัดให้มีการไขลานเพิ่มเติมตามแกนของถนนและขึ้นอยู่กับปฏิสัมพันธ์ของกระแสในขดลวดนี้กับสนามแม่เหล็กไฟฟ้าฉุด ระบบฉุดลากไฟฟ้าที่พัฒนาขึ้นโดยใช้มอเตอร์เชิงเส้นตรงแบบซิงโครนัสที่อธิบายข้างต้นมีประสิทธิภาพที่ดี แต่สำหรับการทำงาน จำเป็นต้องวางขดลวดในพื้นถนน ซึ่งจะทำให้ต้นทุนในการผลิตระบบเพิ่มขึ้นและทำให้การบำรุงรักษายุ่งยาก โดยเฉพาะอย่างยิ่งเมื่อมีความยาวมาก ถนน. ในเรื่องนี้ ได้มีการพัฒนาการออกแบบมอเตอร์ซิงโครนัสเชิงเส้นตรงที่ไม่ต้องมีการวางขดลวดในรางรถไฟ ซึ่งรวมถึงมอเตอร์ซิงโครนัสเชิงเส้นที่เรียกว่า unipolar excitation และเสารูปกรงเล็บ เครื่องยนต์ของทั้งสองรุ่นใช้ขับรถไฟขนาด 50 ตันด้วยความเร็ว 480 กม./ชม.

ในรูป 12 แสดงไดอะแกรมของมอเตอร์เชิงเส้นตรงแบบซิงโครนัสพร้อมการกระตุ้นแบบขั้วเดียว เครื่องยนต์มีสองสเตเตอร์ 1 ติดตั้งอยู่บนส่วนที่เคลื่อนไหวขององค์ประกอบ สนามแม่เหล็กเคลื่อนที่ถูกสร้างขึ้นโดยใช้ขดลวด 2 ที่เชื่อมต่อกับเครือข่ายกระแสสลับ สเตเตอร์เชื่อมต่อด้วยวงจรแม่เหล็ก 3 ซึ่งมีขดลวดกระตุ้น unipolar 4 อยู่ ขดลวดนี้สร้างฟลักซ์แม่เหล็กที่มีทิศทางคงที่ซึ่งจะแทรกซึมองค์ประกอบรองของเฟอร์โรแมกเนติก 5 ซึ่งวางอยู่ในวงจรแม่เหล็ก ปฏิสัมพันธ์ของสนามแม่เหล็กเคลื่อนที่กับองค์ประกอบทุติยภูมิที่สร้างด้วยแม่เหล็กจะสร้างแรงฉุดลากของสต็อกกลิ้ง
การเปรียบเทียบมอเตอร์ซิงโครนัสเชิงเส้นที่มีการกระตุ้น unipolar และเสารูปกรงเล็บกับมอเตอร์เชิงเส้นตรงแบบอะซิงโครนัสสำหรับความพยายามในการลากแบบเดียวกันพบว่าตัวหลังมีตัวประกอบกำลังที่แย่กว่า (ประมาณ 0.6) ประสิทธิภาพต่ำกว่า (ประมาณ 80%) และมวลมากต่อ หน่วยกำลังของเครื่องยนต์
5. สรุป.
การใช้มอเตอร์ไฟฟ้าเชิงเส้นทำให้ลดความซับซ้อนหรือขจัดออกโดยสิ้นเชิง เกียร์กลเพิ่มประสิทธิภาพและความน่าเชื่อถือของไดรฟ์และกลไกการผลิตโดยรวม
6. รายการอ้างอิง
1. วี.วี. มาคาเลนโก มอเตอร์ไฟฟ้าวัตถุประสงค์พิเศษ Energoizdat 1981.
2. Kavalev Yu.M. , รถยนต์ไฟฟ้า, - ม.: พลังงาน, 1989.




