Mitsubishi Outlander เกียร์ ขับเคลื่อนสี่ล้อ มิตซูบิชิ Outlander เกียร์ มิตซูบิชิ ขับเคลื่อนสี่ล้อ ระบบขับเคลื่อนสี่ล้อ Mitsubishi Outlander S-AWC ทำงานอย่างไร
ข้อมูลจำเพาะ Mitsubishi Outlander ถูกกำหนดโดยสามตัวเลือกที่ใช้ โรงไฟฟ้า. น้ำมันเบนซินสอง "สี่" ที่มีปริมาตร 2.0 และ 2.4 ลิตรให้ 146 และ 167 แรงม้า ตามลำดับ ด้านบน สายมอเตอร์มีเครื่องยนต์ V6 3.0 ลิตรสำหรับรุ่น Mitsubishi Outlanderกีฬา. เขาพัฒนา พลังสูงสุด 230 แรงม้า และสร้างแรงบิด 292 นิวตันเมตร (ที่ 3750 รอบต่อนาที)
การปรับเปลี่ยนด้านบนของ Outlander เกี่ยวข้องกับการติดตั้งร่วมกับ หน่วยพลังงาน 6 สปีด กล่องอัตโนมัติเกียร์ ครอสโอเวอร์รุ่นอื่นติดตั้ง Jatco CVT รุ่นที่แปดพร้อมทอร์คคอนเวอร์เตอร์ ควบคู่ V6 230 แรงม้า และ 6AKPP จัดให้ รุ่นกีฬา Outlander ไดนามิกที่ดี - สูงถึง 100 กม. / ชม. รถเร่งใน 8.9 วินาที ตัวเลือกครอสโอเวอร์ซึ่งซ่อนหน่วย 4 สูบคู่ใด ๆ ไว้ใต้ประทุนไม่สามารถอวดความคล่องตัวดังกล่าวได้ ใช้เวลามากกว่า 10 วินาทีในการพุ่งไปที่ "หลายร้อย"
ปริมาณการใช้เชื้อเพลิงเฉลี่ยของ Mitsubishi Outlander แตกต่างกันไปจาก 7.3 ถึง 8.9 ลิตร "ไม่รู้จักพอ" ที่สุดคือ "หก" ขนาด 3.0 ลิตรตามข้อมูลหนังสือเดินทางซึ่งใช้เชื้อเพลิงประมาณ 12.2 ลิตรในวัฏจักรเมือง
พารามิเตอร์ทางเรขาคณิตของตัวรถนั้นน่าสนใจโดยหลักแล้วสำหรับความเท่าเทียมกันของมุมเข้าและออก ซึ่งแต่ละมุมไม่เกิน 21 องศา มุมลาดมีความสำคัญเท่ากัน กวาดล้าง(ระยะเว้น) Mitsubishi Outlander 215 mm.
ครอสโอเวอร์ญี่ปุ่นอยู่ด้านหน้าและ การปรับเปลี่ยนระบบขับเคลื่อนสี่ล้อ. ขับเคลื่อนล้อหน้ามีให้สำหรับรุ่นที่มีเครื่องยนต์ 2.0 ลิตร "จูเนียร์" เท่านั้น ระบบขับเคลื่อนสี่ล้อมีสองรูปแบบที่เป็นไปได้: All Wheel Control (AWC) และ Super All Wheel Control (S-AWC) ตัวเลือกที่สอง ซึ่งเพิ่มความเสถียรในมุมที่มีความเร็วสูงและบนพื้นผิวที่ลื่น ได้รับการพัฒนาขึ้นสำหรับ Outlander Sport 3.0 โดยเฉพาะ
เทคนิค ลักษณะเฉพาะ มิตซูบิชิ Outlander - ตารางเดือย:
| พารามิเตอร์ | Outlander 2.0 CVT 146 HP | Outlander 2.4 CVT 167 HP | Outlander Sport 3.0 AT 230 HP | |
|---|---|---|---|---|
| เครื่องยนต์ | ||||
| ประเภทของเครื่องยนต์ | น้ำมันเบนซิน | |||
| ชนิดฉีด | แจกจ่าย | |||
| ซุปเปอร์ชาร์จ | ไม่ | |||
| จำนวนกระบอกสูบ | 4 | 6 | ||
| การจัดเรียงกระบอกสูบ | แถว | รูปตัววี | ||
| จำนวนวาล์วต่อสูบ | 4 | |||
| ปริมาณ, ลูกบาศ์ก. ซม. | 1998 | 2360 | 2998 | |
| กำลังแรงม้า (ที่รอบต่อนาที) | 146 (6000) | 167 (6000) | 230 (6250) | |
| 196 (4200) | 222 (4100) | 292 (3750) | ||
| การแพร่เชื้อ | ||||
| หน่วยไดรฟ์ | ด้านหน้า | เต็ม (AWC) | เต็ม (AWC) | เต็ม (S-AWC) |
| การแพร่เชื้อ | ไดรฟ์ความเร็วตัวแปร | 6เกียร์ออโต้ | ||
| ช่วงล่าง | ||||
| ชนิดกันสะเทือนหน้า | MacPherson ประเภทอิสระ | |||
| แบบกันสะเทือนหลัง | อิสระหลายลิงค์ | |||
| ระบบเบรก | ||||
| เบรคหน้า | แผ่นระบายอากาศ | |||
| เบรคหลัง | แผ่นระบายอากาศ | |||
| พวงมาลัย | ||||
| ประเภทเครื่องขยายเสียง | ไฟฟ้า | |||
| ยางและล้อ | ||||
| ขนาดยาง | 215/70 R16 | 225/55R18 | ||
| ขนาดดิสก์ | 6.5Jx16 | 7.0Jx18 | ||
| เชื้อเพลิง | ||||
| ประเภทเชื้อเพลิง | AI-92 | AI-95 | ||
| ปริมาณถัง l | 63 | 60 | 60 | |
| การบริโภคน้ำมันเชื้อเพลิง | ||||
| รอบเมือง l/100 km | 9.5 | 9.6 | 9.8 | 12.2 |
| รอบประเทศ l/100 km | 6.1 | 6.4 | 6.5 | 7.0 |
| รอบรวม l/100 km | 7.3 | 7.6 | 7.7 | 8.9 |
| ขนาด | ||||
| เลขที่นั่ง | 5 | |||
| ความยาว mm | 4695 | |||
| ความกว้าง mm | 1800 | |||
| ความสูง (พร้อมราวหลังคา) mm | 1680 | |||
| ฐานล้อ mm | 2670 | |||
| รางล้อหน้า mm | 1540 | |||
| รางล้อหลัง mm | 1540 | |||
| ปริมาณลำตัว (ต่ำสุด/สูงสุด), l | 591/1754 | 477/1640 | ||
| ระยะห่างจากพื้นดิน (ระยะห่าง), mm | 215 | |||
| น้ำหนัก | ||||
| พร้อมกก. | 1425 | 1490 | 1505 | 1580 |
| เต็มกก | 1985 | 2210 | 2270 | |
| น้ำหนักรถพ่วงสูงสุด (พร้อมเบรก), kg | 1600 | |||
| ลักษณะไดนามิก | ||||
| ความเร็วสูงสุดกม./ชม | 193 | 188 | 198 | 205 |
| เวลาเร่งความเร็วถึง 100 กม./ชม., s | 11.1 | 11.7 | 10.2 | 8.7 |
เครื่องยนต์ Mitsubishi Outlander - ข้อมูลจำเพาะ
มอเตอร์ทั้งสามตัวที่มีให้สำหรับครอสโอเวอร์ได้รับการติดตั้งระบบควบคุมการยกวาล์ว MIVEC ซึ่งช่วยให้สามารถเปลี่ยนโหมดการทำงานของวาล์ว (เวลาเปิด เฟสทับซ้อนกัน) โดยขึ้นอยู่กับความเร็ว ซึ่งช่วยเพิ่มกำลังเครื่องยนต์ ประหยัดเชื้อเพลิง และลดการปล่อยมลพิษที่เป็นอันตราย
ลักษณะเฉพาะ เครื่องยนต์มิตซูบิชิคนต่างชาติ:
| พารามิเตอร์ | Outlander 2.0 146 แรงม้า | Outlander 2.4 167 แรงม้า | Outlander 3.0 230 แรงม้า |
|---|---|---|---|
| รหัสเครื่องยนต์ | 4B11 | 4B12 | 6B31 |
| ประเภทของเครื่องยนต์ | น้ำมันเบนซินที่ไม่มีเทอร์โบชาร์จ | ||
| ระบบอุปทาน | การฉีดแบบกระจาย ระบบอิเล็กทรอนิกส์ชุดควบคุมวาล์ว MIVEC, เพลาลูกเบี้ยวสองตัว (DOHC), ตัวขับโซ่ไทม์มิ่ง | การฉีดแบบกระจาย, ระบบควบคุมวาล์วอิเล็กทรอนิกส์ MIVEC, หนึ่งเพลาลูกเบี้ยวต่อถังสูบ (SOHC), สายพานไทม์มิ่งไดรฟ์ | |
| จำนวนกระบอกสูบ | 4 | 6 | |
| การจัดเรียงกระบอกสูบ | แถว | รูปตัววี | |
| จำนวนวาล์ว | 16 | 24 | |
| เส้นผ่านศูนย์กลางกระบอกสูบ mm | 86 | 88 | 87.6 |
| จังหวะลูกสูบ mm | 86 | 97 | 82.9 |
| อัตราการบีบอัด | 10:1 | 10.5:1 | |
| ปริมาณการทำงาน ลูกบาศ์ก ซม. | 1998 | 2360 | 2998 |
| กำลังแรงม้า (ที่รอบต่อนาที) | 146 (6000) | 167 (6000) | 230 (6250) |
| แรงบิด N*m (ที่รอบต่อนาที) | 196 (4200) | 222 (4100) | 292 (3750) |
ระบบขับเคลื่อนสี่ล้อ Mitsubishi Outlander
All Wheel Control (AWC) เป็นระบบขับเคลื่อนล้อหน้าซึ่ง เพลาหลังเชื่อมต่อด้วยคลัตช์แม่เหล็กไฟฟ้าที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ สามารถย้อนกลับได้ถึง 50% ของแรงขับ มีสามโหมดการทำงานของไดรฟ์ AWC - ECO อัตโนมัติและล็อค ในโหมดประหยัด แรงบิดทั้งหมดจะถูกถ่ายโอนไปยังเพลาหน้าโดยค่าเริ่มต้น และด้านหลังจะทำงานเมื่อลื่นไถลเท่านั้น โหมดอัตโนมัติกระจายแรงอย่างเหมาะสมตามค่าที่ได้รับ หน่วยอิเล็กทรอนิกส์ข้อมูล (ความเร็วล้อ ตำแหน่งแป้นคันเร่ง) โหมดการบล็อกเพิ่มปริมาณการส่งสัญญาณโดย ล้อหลังแรงบิดซึ่งรับประกันอัตราเร่งที่มั่นใจและพฤติกรรมที่เสถียรยิ่งขึ้นบนพื้นผิวที่ไม่เสถียร ความแตกต่างที่สำคัญระหว่าง Lock และ Auto คือล้อหลังในตอนแรกมีแรงฉุดมากขึ้นโดยไม่คำนึงว่าจะมีการตรวจพบการลื่นหรือไม่ 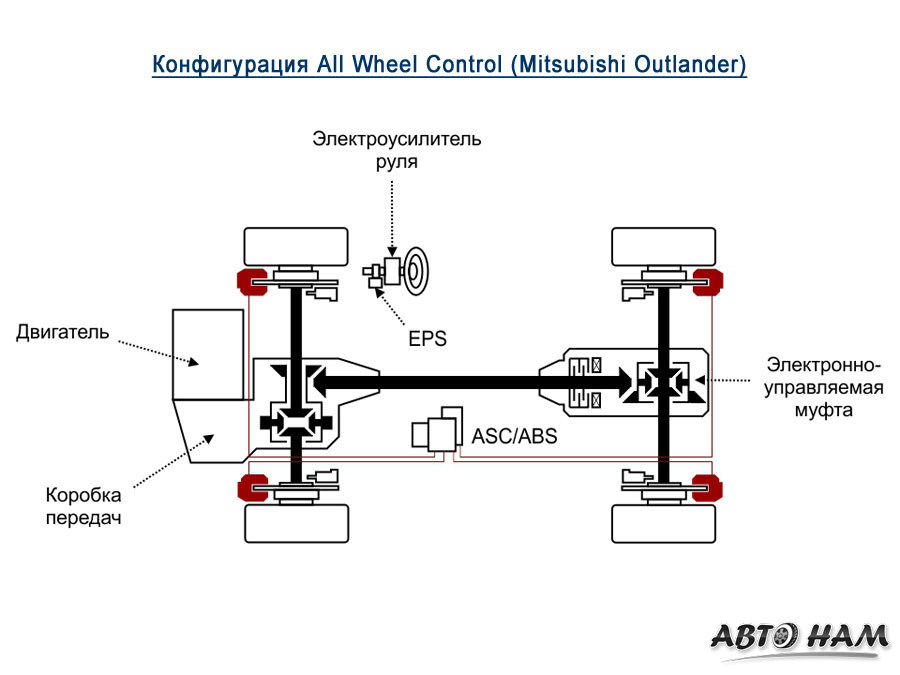
ระบบ Super All Wheel Control (S-AWC) เป็นรูปแบบขั้นสูงของ AWC แบบเดิม โดยติดตั้ง Active Differential (AFD) ที่เพลาหน้า เพื่อกระจายกำลังระหว่างล้อ ดังนั้นกลไกเพิ่มเติมในการควบคุมพฤติกรรมของรถจึงปรากฏขึ้น S-AWC มีระบบป้องกันภาพสั่นไหว, ABS, พวงมาลัยเพาเวอร์ไฟฟ้าและระบบเบรก ดังนั้น ชุดควบคุมของระบบควบคุม Super All Wheel Control ภายใต้เงื่อนไขบางประการ สามารถเริ่มการเบรกของล้อได้ ตัวอย่างเช่น ในกรณีที่มีการดริฟท์ระหว่างทางโค้ง
ตัวเลือกโหมดการทำงานเต็มรูปแบบ ไดรฟ์ S-AWCมีสี่ตำแหน่ง: Eco, Normal, Snow และ Lock โหมดหิมะปรับการตั้งค่าระบบให้เหมาะสมสำหรับการขับขี่บนพื้นผิวที่ลื่น 
บางทีทุกครั้งที่เราเห็นคำว่า "ใหม่" "ปฏิวัติ" "ไม่มีใครเทียบ" เราต้องการที่จะอุทานบางอย่างที่มีไหวพริบ บางอย่างเกี่ยวกับจักรยานและเกี่ยวกับนักประดิษฐ์ เกี่ยวกับสุนัขและจำนวนแขนขา หรือบางอย่างที่เหน็บแนมไม่น้อย อย่างไรก็ตาม สามัญสำนึกบอกเราว่าสิ่งต่างๆ ไม่ใช่เรื่องง่าย รถยนต์ไม่ได้ติดตั้งระบบเสมอไป เสถียรภาพทางอิเล็กทรอนิกส์ครั้งหนึ่งและตอนนี้ก็มีการนำระบบ ABS ที่คุ้นเคยเข้ามาในรถเป็นครั้งแรก แล้ววันนี้ล่ะ? การไม่มี ABS มักจะทำให้งง และ ESP ได้กลายเป็นอุปกรณ์บังคับสำหรับการติดตั้งทุกอย่างแล้ว รถยนต์นั่งส่วนบุคคลในแคนาดา สหรัฐอเมริกา และล่าสุดในยุโรป มีอะไรใหม่ให้เราเป็นวิศวกร MMC? ลองคิดดูสิ
พูดอย่างเคร่งครัดคำย่อ S-AWC นั้นคุ้นเคยกับเราแล้ว ระบบนี้ใช้ครั้งแรกกับ มิตซูบิชิในตำนาน แลนเซอร์ อีโว X. และตัวแทนของ Mitsubishi ยืนยันว่าแม้ว่า "ตัวอักษรจะเหมือนกัน" แต่ใน ใหม่ Outlanderทุกอย่างถูกจัดเรียงแตกต่างกันเล็กน้อย โดยทั่วไป S-AWC นั้นไม่ใช่วิธีแก้ปัญหาที่เฉพาะเจาะจงมากนัก ชุดของหน่วยตามแนวคิดเชิงอุดมคติซึ่งหากเราเพิกเฉยต่อสิ่งเล็กน้อยคือการให้รถมีพวงมาลัยที่เป็นกลางในสภาวะเหล่านั้นเมื่อ โอเวอร์สเตียร์หรือโอเวอร์สเตียร์ พร้อมให้การยึดเกาะที่ดีของล้อขับเคลื่อนกับถนน
สิ่งนี้บรรลุผลได้อย่างไร? ที่ Evolution ระบบประกอบด้วยหน่วยต่อไปนี้:
Active Center Differential (ACD) ซึ่งเป็นระบบไฮดรอลิกที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ คลัตช์หลายแผ่นภารกิจหลักคือการกระจายแรงบิดระหว่างเพลาบวกกับ "บล็อคที่นุ่มนวล" ดิฟเฟอเรนเชียลเพื่อเพิ่มประสิทธิภาพการส่งแรงบิดไปยังเพลาหน้า/หลังและให้การยึดเกาะถนนที่สมดุลพร้อมทั้งรักษาความสามารถในการควบคุม
Active Yaw Control (AYC) ควบคุมการกระจายแรงบิดระหว่าง ล้อหลังเพื่อให้มีเสถียรภาพเมื่อขับเข้าโค้ง และยังสามารถล็อกเฟืองท้ายบางส่วนเพื่อส่งแรงบิดไปยังล้อที่ "จับคู่" กับถนนมากขึ้น
การจัดการที่ใช้งานอยู่ความมั่นคง (ASC) ให้ ด้ามจับที่ดีที่สุดล้อรถ "สำลัก" มอเตอร์ถ้าจำเป็นและปรับ แรงเบรกในทุกล้อ ควรสังเกตว่าความผิดปกติของระบบนี้คือ MMS ได้เปิดตัวเซ็นเซอร์แรงใน .เป็นครั้งแรก ระบบเบรค(นอกเหนือจากเซ็นเซอร์มาตรฐานสำหรับระบบดังกล่าว - มาตรความเร่งและเซ็นเซอร์ตำแหน่งหางเสือ) ซึ่งทำให้ระบบมีข้อมูลที่แม่นยำยิ่งขึ้น ดังนั้นจึงมีการตอบสนองที่เพียงพอมากขึ้น
และในที่สุดก็, ระบบควบคุมการฉุดลาก(ABS) พร้อมการตั้งค่าแบบสปอร์ต ระบบจะรับความเร็วของการหมุนของแต่ละล้อบวกกับมุมของล้อหน้า และใช้ระบบเบรกเพื่อปลดหรือในทางกลับกัน เบรกแต่ละล้อแต่ละล้อ
แล้ว Outlander ล่ะ? ใช่ ไม่ใช่เรื่องบังเอิญที่เราได้พิจารณาส่วนประกอบของระบบ S-AWC ของ Lancer Evo X อย่างละเอียดก่อนที่จะเปลี่ยนไปใช้รถครอสโอเวอร์รุ่นใหม่ ที่นี่วิศวกรของ บริษัท ไม่ได้ตีความระบบใน "แลนเซอร์" และบนรถของเราแตกต่างกันมากในการออกแบบอย่างที่เราจะเห็น แล้วหน่วยไหนคือ ระบบใหม่ ขับเคลื่อนสี่ล้อใน Outlander?

ดิฟเฟอเรนเชียลด้านหน้าแบบแอ็คทีฟ (AFD) ควบคุมการกระจายแรงบิดระหว่างล้อของเพลาหน้า
พวงมาลัยเพาเวอร์ไฟฟ้า (EPS) ไม่ใช่เรื่องบังเอิญที่ถูกกำหนดให้กับระบบขับเคลื่อนสี่ล้อ S-AWC หน้าที่ของมันคือการปรับชดเชยแรงปฏิกิริยาบนพวงมาลัยที่เกิดขึ้นเมื่อมีการกระจายโมเมนต์บนล้อหน้า ให้การบังคับเลี้ยวที่สะดวกสบายในสภาวะ งานประจำ AFD
คลัตช์แม่เหล็กไฟฟ้า. เชื่อมต่อเพลาล้อหลัง ควบคุมแรงบิดที่ส่งไปยังเพลาล้อหลัง
ชุดควบคุม S-AWC ต่างจากระบบทั่วไป คือใช้ชุดเซ็นเซอร์ความเร่งที่ขยายออกเพื่อกำหนดทิศทางของรถเช่นเดียวกับ ความเร็วเชิงมุมและโหลดตามขวาง
อะไรคือความแตกต่าง? โดยส่วนตัวแล้ว สองคนสบตาฉัน และค่อนข้างจริงจัง สำหรับเพลาหน้า แทนที่จะเป็นเฟืองท้ายแบบลิมิเต็ดสลิป ตอนนี้เรามีดิฟเฟอเรนเชียลด้านหน้าแบบควบคุมด้วยความเป็นไปได้ของการล็อกบางส่วนและความสามารถในการกระจายแรงบิดระหว่างล้อ แน่นอนว่าการรวมระบบดังกล่าวในขณะเดินทางอาจไม่ส่งผลต่อการขับขี่อย่างดีที่สุด เราจะรู้สึกถึงการทำงานทั้งหมดบนพวงมาลัยในรูปแบบของแรงปฏิกิริยาในทางปฏิบัติ - กระตุกและไม่ใช่ในเวลาที่สะดวกที่สุดเนื่องจากเป็นที่ชัดเจนว่าระบบจะทำงานเมื่อสภาพการขับขี่นั้นเบาบางไม่เอื้ออำนวย .
แต่ระบบย่อยอื่นเข้ามามีบทบาทคือพวงมาลัยเพาเวอร์ไฟฟ้า โดยจะปรับอัตราขยายได้ทันที โดยชดเชยการเปลี่ยนแปลงของแรงปฏิกิริยาบนพวงมาลัยเมื่อคลัตช์ส่วนหน้าแบบแอ็คทีฟทำงานอยู่ และทั้งหมดนี้แทบจะมองไม่เห็นสำหรับคนขับและไม่สูญเสียการควบคุม
ดังนั้นเราจึงมีชุดเครื่องมือเพียงพอที่จะมีอิทธิพลต่อพฤติกรรมของรถ และทุกอย่างอยู่ในมือของวิศวกรผู้ตั้งโปรแกรมและกำหนดค่าระบบควบคุมสำหรับเครื่องมือเหล่านี้ทั้งหมดสำหรับเรา พวกเขาให้อะไรเราบ้าง?
และมอบโหมดการทำงานของระบบให้คนขับสี่โหมด
Mitsubishi Outlander 2.4 AT ใน Bortzhurnal สูงสุด ความจริงทั้งหมดเกี่ยวกับระบบขับเคลื่อนสี่ล้อ "ถาวร"
ไม่นานมานี้ ฉันเขียนที่นี่ว่าฉันติดอยู่กับรถเอทีวีได้อย่างไร
คดีนี้ทำให้ฉันรำคาญเล็กน้อยและฉันก็เริ่มสนใจมากขึ้นว่าจะเป็นแบบไหน ขับเต็มที่ที่ฉันไม่สามารถออกจากกองหิมะได้
และฉันก็ไปที่ Google และอ่านฟอรัม และนี่คือวิธีที่ฉันจินตนาการ
ขับเคลื่อนสี่ล้อแบ่งออกเป็นสอง กลุ่มใหญ่, คงที่สมบูรณ์และ เสียบเข้าไป.
คงที่. นี่คือเมื่อโมเมนต์ถูกส่งไปยังทั้ง 4
ล้อ ตัวอย่างเช่น รถจี๊ปของฉัน 🙂 หนึ่งในนั้น
เสียบเข้าไป. นี่คือเวลาที่รถส่วนใหญ่ขับเคลื่อนไปที่เพลาเดียว เช่น เพลาหน้า และเมื่อเพลาขับเลื่อน มันจะทำงานโดยอัตโนมัติก่อนที่จะไม่ทำงาน (คุณสามารถเปิดเครื่องด้วยปุ่มต่างๆ ได้ แต่โดยปกติแล้วจะอยู่ที่ความเร็วต่ำเท่านั้น หรือในอึสักครู่) ระบบที่คล้ายกันบน Out XL และ SUV สมัยใหม่ส่วนใหญ่
อย่างที่คุณเข้าใจ ฉันสนใจระบบขับเคลื่อนสี่ล้อประเภทแรกแบบถาวร
ปรากฎว่าแบ่งเป็นพวงของพันธุ์
อ่านยัง
แต่ก่อนอื่น ทฤษฎีเล็กน้อย 🙂
ดิฟเฟอเรนเชียล นี่คือ อุปกรณ์เครื่องกลซึ่งทำให้ล้อหมุนได้ด้วย ความเร็วต่างกัน.
และสิ่งนี้จำเป็นต้องทำหลงทางเพราะล้อจะหมุนด้วยความเร็วต่างกันและเพื่อให้เลี้ยวสบายขึ้นและไม่มีการสึกหรอบนยาง เฟืองท้ายช่วยให้คุณกระจายแรงบิดระหว่างล้อเหล่านี้ในสัดส่วนที่ต่างกัน .
ในรถขับเคลื่อนสี่ล้อ ตัวอย่างเช่น ในเฟืองท้าย ต่างด้าวก่อนรุ่น หนึ่งอันสำหรับแต่ละแกน เพลาหน้าและเพลาหลัง ซึ่งทำหน้าที่กระจายแรงบิดระหว่างล้อบนเพลาที่เกี่ยวข้อง รวมทั้งเพลากลางซึ่งกระจายแรงบิดระหว่างเพลา
ระบบขับเคลื่อนสี่ล้อ Mitsubishi Outlander S-AWC ทำงานอย่างไร
งานเต็ม ขับ Mitsubishi Outlander (ในรถไม่มี ESP)
Mitsubishi Outlander AWD บนลูกกลิ้งทำงานอย่างไร
[ป้องกันอีเมล] www.diffblock.com vk.com/diffblock Mitsubishi Outlander 2013 (2.4l 200hp). การทดสอบ ขับเคลื่อนสี่ล้อ .
ดังนั้นใน My Out เมื่อมันยืนอยู่บนพื้นผิวที่เรียบ ช่วงเวลาจะถูกกระจายในส่วนเท่าๆ กันไปยังล้อทุกล้อ นั่นคือ 25% (อย่างไรก็ตาม นี่ไม่ใช่กรณีทุกที่ใน Subaru ตัวอย่างเช่น ตาม เพื่อการกระจายของเพลาซึ่งคิดเป็น 90% ตามแบบเพลาหน้า 10% ที่ด้านหลัง)
อ่านยัง
แต่การซุ่มโจมตีก็คือ เฟืองท้ายจะเคลื่อนเวลาส่วนใหญ่ไปยังล้อที่บรรทุกน้อยกว่า ดังนั้นเมื่อล้อข้างหนึ่งลื่นหรือหลุด ช่วงเวลาทั้งหมดก็จะไปถึงล้อนั้น และล้อที่เหลือก็หยุดนิ่ง!
เพื่อป้องกันไม่ให้สิ่งนี้เกิดขึ้น มีล็อกเฟืองท้าย ซึ่งสามารถถ่ายโอนเวลาเท่ากันไปยังเพลาและล้อได้เสมอ
และปราสาทก็สามารถเป็นหนึ่งเดียวได้ เพลากลางจากนั้นโมเมนต์จะถูกส่งเท่ากับเพลาทั้งสอง แต่กระจายระหว่างล้อตามเพลาบนพื้นฐานของความต้านทานน้อยที่สุดดังนั้นด้วยล็อคเดียวก็เพียงพอแล้วที่จะมีสองล้อด้านหลังและแผงด้านหน้าหนึ่งอัน เพื่อให้รถสามารถยืนขึ้นได้
และอีกไม่กี่ บนแกนบวกบนเพลาแต่ละล้อแต่ละล้อ แล้วรถจะหมุนจนล้อติดหมด :)
และที่นี่ แข็งการล็อคคือโดยการกดปุ่มคุณบังคับล็อคดิฟและล้อทั้งหมดจะให้เวลาเท่ากันเสมอ มันช่วยอึและอย่างน้อย หนึ่งล้อบนพื้นผิวที่แข็ง ในทางกลับกัน มันจะหมุนอย่างรุนแรงเพื่อทำลายการควบคุม
นอกจากนี้ยังมี รถยนต์ตัวอย่างเช่น ใน Out ของฉันโดยใช้ viskomufty ซึ่งเป็นขยะชนิดหนึ่งที่มีของเหลวเหมือนเยลลี่อยู่ข้างใน เมื่อพลาด บางสิ่งก็เริ่มโกรธเคืองที่นั่น ของเหลวภายในหนาขึ้นและระหว่างส่วนต่างของเพลาถูกบล็อก
แต่ viskomufta ไม่ใช่วิธีที่สะดวกที่สุดสำหรับการหลงทางแบบออฟโรด มันวิ่งมาเป็นเวลานานและฉันเข้าใจว่ามันไม่ผ่านเพลาฟรี 50% ที่ซื่อสัตย์
และตอนนี้กรณีของฉันด้านหน้าขวาซึ่งฉันอยู่ในอากาศและหันอย่างรุนแรงตามลำดับในช่วงเวลาหน้าซ้ายมันไม่ได้พลิกเลย แต่บนเพลาหลังของคัปปลิ้งหนืดมันถูกแทนที่โดยส่วนหนึ่งของ วินาทีนั้น แต่เห็นได้ชัดว่ามันไม่เพียงพอที่เพลาล้อหลังจะดึงส่วนหน้าออกจากกองหิมะ ดังนั้นจนกระทั่งฉันระเบิด ฉันก็ขยับตัวไม่ได้
ในระบบขับเคลื่อนสี่ล้อด้วย ระบบควบคุมอิเล็กทรอนิกส์มีโหมดการทำงานสามโหมดที่สามารถเลือกได้โดยการหมุนสวิตช์ขึ้นอยู่กับสภาพถนน
โหมดการขับขี่มีดังนี้
ควบคุม รถขับเคลื่อนสี่ล้อต้องใช้ทักษะการขับรถเป็นพิเศษ
โปรดอ่านส่วน "การใช้ 4WD" อย่างระมัดระวังและรักษารูปแบบการขับขี่ที่ปลอดภัย
การเลือกโหมดทำได้โดยการหมุนสวิตช์ที่สวิตช์กุญแจที่รวมอยู่
- 4WD AUTO
- 4WD ล็อค
ในขณะที่เปลี่ยนโหมดการขับขี่ โหมดใหม่จะแสดงในหน้าต่างข้อมูลของจอแสดงผลมัลติฟังก์ชัน ซึ่งจะขัดจังหวะการอ่านค่าปัจจุบันชั่วขณะหนึ่ง
หลังจากนั้นไม่กี่วินาที หน้าต่างก่อนหน้าจะปรากฏขึ้นอีกครั้งบนจอแสดงผล
คำเตือน
- ห้ามมิให้เปลี่ยนโหมดการขับขี่ในขณะที่ล้อหน้าลื่นไถล (เช่น ในหิมะ) ซึ่งอาจทำให้รถกระตุกในทิศทางที่คาดเดาไม่ได้
- การขับรถบนถนนลาดยางแห้งในโหมด 4WD LOCK ส่งผลให้ การบริโภคที่เพิ่มขึ้นเชื้อเพลิงและระดับเสียงที่เพิ่มขึ้น
- ไม่แนะนำให้ขับในโหมด 2WD หากล้อหมุน
สิ่งนี้สามารถนำไปสู่ความร้อนสูงเกินไปของชุดเกียร์และชุดประกอบ
บันทึก
สามารถเปลี่ยนโหมดการขับขี่ได้ทั้งในที่จอดรถและขณะขับรถ
หน้าต่างแสดงผลจะปรากฏขึ้นเมื่อเปิดสวิตช์กุญแจ จากนั้นระบบจะแสดงขึ้นสองสามวินาทีหลังจากสตาร์ทเครื่องยนต์ 
หน้าจอแสดงหน้าต่างแสดงผลโหมดการขับขี่ต่อไปนี้
| โหมดการขับขี่ | ||
|---|---|---|
| 4WD ตัวบ่งชี้ | ล็อคตัวบ่งชี้ | |
| 2WD | ปิด | ปิด |
| 4WD AUTO | รวมอยู่ด้วย | ปิด |
| 4WD ล็อค | รวมอยู่ด้วย | รวมอยู่ด้วย |
คำเตือน





