คู่มือการใช้ระบบขับเคลื่อนทุกล้อแบบอิเล็กทรอนิกส์ Outlander XL ครอสโอเวอร์ที่ล้ำสมัยที่สุด? เราศึกษาระบบขับเคลื่อนสี่ล้อของ Mitsubishi Outlander Sport Outlander ใหม่ ระบบขับเคลื่อนสี่ล้อแบบถาวรหรือแบบปลั๊กอิน
ในระบบขับเคลื่อนสี่ล้อด้วย ระบบควบคุมอิเล็กทรอนิกส์มีโหมดการทำงานสามโหมดที่สามารถเลือกได้โดยการหมุนสวิตช์ขึ้นอยู่กับสภาพถนน
โหมดการขับขี่มีดังนี้
ควบคุม รถขับเคลื่อนสี่ล้อต้องใช้ทักษะการขับรถเป็นพิเศษ
โปรดอ่านส่วน "การใช้ 4WD" อย่างระมัดระวังและรักษารูปแบบการขับขี่ที่ปลอดภัย
การเลือกโหมดทำได้โดยการหมุนสวิตช์ที่สวิตช์กุญแจที่รวมอยู่
- 4WD AUTO
- 4WD ล็อค
ในขณะที่เปลี่ยนโหมดการขับขี่ โหมดใหม่จะแสดงในหน้าต่างข้อมูลของจอแสดงผลมัลติฟังก์ชัน ซึ่งจะขัดจังหวะการอ่านค่าปัจจุบันชั่วขณะหนึ่ง
หลังจากนั้นไม่กี่วินาที หน้าต่างก่อนหน้าจะปรากฏขึ้นอีกครั้งบนจอแสดงผล
คำเตือน
- ห้ามมิให้เปลี่ยนโหมดการขับขี่ในขณะที่ล้อหน้าลื่นไถล (เช่น ในหิมะ) ซึ่งอาจทำให้รถกระตุกในทิศทางที่คาดเดาไม่ได้
- การขับรถบนถนนลาดยางแห้งในโหมด 4WD LOCK ส่งผลให้ การบริโภคที่เพิ่มขึ้นเชื้อเพลิงและระดับเสียงที่เพิ่มขึ้น
- ไม่แนะนำให้ขับในโหมด 2WD หากล้อหมุน
สิ่งนี้สามารถนำไปสู่ความร้อนสูงเกินไปของชุดเกียร์และชุดประกอบ
บันทึก
สามารถเปลี่ยนโหมดการขับขี่ได้ทั้งในที่จอดรถและขณะขับรถ
หน้าต่างแสดงผลจะปรากฏขึ้นเมื่อเปิดสวิตช์กุญแจ จากนั้นระบบจะแสดงขึ้นสองสามวินาทีหลังจากสตาร์ทเครื่องยนต์ 
หน้าจอแสดงหน้าต่างแสดงผลโหมดการขับขี่ต่อไปนี้
| โหมดการขับขี่ | ||
|---|---|---|
| 4WD ตัวบ่งชี้ | ล็อคตัวบ่งชี้ | |
| 2WD | ปิด | ปิด |
| 4WD AUTO | รวมอยู่ด้วย | ปิด |
| 4WD ล็อค | รวมอยู่ด้วย | รวมอยู่ด้วย |
คำเตือน


ในทางปฏิบัติ Mitsubishi ได้ศึกษาการใช้ระบบขับเคลื่อนสี่ล้อเพื่อพิจารณาว่าโซลูชันทางเทคโนโลยีใดเหมาะสมที่สุดสำหรับ ประเภทนี้รถยนต์และสะดวกที่สุดสำหรับเจ้าของรถครอสโอเวอร์ขนาดกะทัดรัดคันนี้ในอนาคต
วิศวกรหันหลังให้โซลูชันแบบเดิม - การใช้ เกียร์อัตโนมัติด้วยระบบขับเคลื่อนสี่ล้อ "ตามต้องการ" ระบบดังกล่าวมีพื้นฐานมาจากข้อเท็จจริงที่ว่าเมื่อล้อหน้าลื่นไถล แรงบิดส่วนหนึ่งจะกระจายไปยัง ล้อหลัง. ผู้เชี่ยวชาญของ Mitsubishi เข้าใจดีว่าผู้บริโภคสนใจระบบที่ลดโอกาสที่ล้อจะลื่นมากขึ้น
Outlander รุ่นก่อนมีระบบขับเคลื่อนสี่ล้อแบบถาวรด้วย ดิฟเฟอเรนเชียล, ถูกบล็อกโดยคัปปลิ้งหนืด, การกระจายตัวของไดรฟ์ตามแกน 50:50 ระบบนี้ให้ประสิทธิภาพที่ดีเยี่ยมในการทำงานหนัก สภาพอากาศ, แต่สำหรับ การทำงานประจำวันการบริโภคน้ำมันเชื้อเพลิงสูง มิตซูบิชิพยายามที่จะให้ ใหม่ Outlanderเหมือนกันหรือ คุณสมบัติที่ดีที่สุดเมื่อนำมาใช้ใน เงื่อนไขที่ยากลำบากโดยมีการเปลี่ยนแปลงการสิ้นเปลืองเชื้อเพลิงเพียงเล็กน้อย
นี่คือวิธีที่ระบบเกิดขึ้น เกียร์ขับเคลื่อนสี่ล้อ MITSUBISHI AWC (ระบบควบคุมล้อทั้งหมด) จาก ของภาษาอังกฤษ All Wheel Control แปลตามตัวอักษรว่าเป็นการควบคุมล้อทั้งหมด ระบบนี้ช่วยให้ผู้ขับขี่สามารถเลือกประเภทของไดรฟ์ได้ ระบบนี้เป็นการผสมผสานระหว่างระบบส่งกำลังขับเคลื่อนสี่ล้อแบบพิเศษ Multi-Select 4WD และ การกระจายทางอิเล็กทรอนิกส์แรงบิดและนอกเหนือจากการควบคุมการฉุดลาก ระบบที่ทันสมัยและระบบ เสถียรภาพของอัตราแลกเปลี่ยน. ต้องขอบคุณระบบ AWC ทำให้ล้อรถมีแรงฉุดลากที่ยอดเยี่ยมกับถนน และการควบคุมที่ยอดเยี่ยมบนส่วนที่ลื่นของลู่วิ่ง เพื่อให้แน่ใจว่ามีการทำงานที่เหมาะสมที่สุดของการส่งสัญญาณ การเลือกโหมดใดโหมดหนึ่งจากสามโหมดที่แสดงบน . ก็เพียงพอแล้ว คอนโซลกลาง"2WD", "4WD" หรือ "ล็อค"
| โหมดการขับขี่ | คำอธิบาย | ข้อดี |
| 2WD | ส่งแรงบิดไปที่ล้อหน้า | ประหยัดน้ำมันมากขึ้น เสียงรบกวนของรถลดลง การควบคุมที่ดีขึ้น สิ่งนี้ยังรักษาความเป็นไปได้ที่ชุดควบคุมจะส่งแรงบิดไปยังเพลาล้อหลังเพื่อลดเสียงรบกวน |
| 4WD อัตโนมัติ | มันกำหนดทิศทางของแรงบิดไปที่ล้อหลังขึ้นอยู่กับตำแหน่งของคันเร่งและความแตกต่างของความเร็วของด้านหน้าและ ล้อหลัง | การกระจายแรงบิดที่เหมาะสมที่สุดสำหรับสภาวะการขับขี่ที่กำหนด การกระจายแรงบิดระหว่างเพลาหน้าและเพลาหลังเป็นแบบอัตโนมัติ หน่วยอิเล็กทรอนิกส์ขึ้นอยู่กับพารามิเตอร์การขับขี่ของรถ (ความเร็วล้อหน้าและล้อหลัง ตำแหน่งแป้นคันเร่ง และความเร็วของรถ) แนะนำให้ใช้โหมดขับเคลื่อน 2 ล้อ |
| ล็อค 4WD | ส่งแรงบิดไปที่ล้อหลังมากกว่าโหมด 4WD ถึง 1.5 เท่า | เพิ่มการยึดเกาะ ให้การทรงตัวที่ความเร็วสูงและ ข้ามดีกว่าบนพื้นผิวที่ไม่เรียบหรือลื่น โหมด LOCK คล้ายกับโหมด 4WD แต่มีการปรับเปลี่ยนกฎการกระจายแรงบิดระหว่างเพลา บน ความเร็วต่ำบน เพลาหลังให้แรงบิดเพิ่มขึ้น 1.5 เท่า และที่ความเร็วสูง แรงบิดจะกระจายอย่างเท่าเทียมกันระหว่างเพลา |
โหมดขับเคลื่อนสองโหมด
4WD อัตโนมัติ
เมื่อเลือก "4WD Auto" ระบบ 4WD รถต่างประเทศ 4WD กระจายแรงบิดบางส่วนไปยังล้อหลังอย่างต่อเนื่อง เพิ่มอัตราส่วนนี้โดยอัตโนมัติเมื่อคุณเหยียบคันเร่ง คลัตช์ส่งแรงฉุดลากไปยังล้อหลังถึง 40% เมื่อเค้นเต็มที่ และลดสิ่งนี้ได้มากถึง 25% ที่ความเร็วมากกว่า 40 ไมล์ต่อชั่วโมง ที่ การเคลื่อนไหวสม่ำเสมอที่ความเร็วการล่องเรือ แรงบิดสูงสุด 15% ที่มีอยู่จะถูกส่งไปยังล้อหลัง ที่ความเร็วต่ำในการเลี้ยวแคบแรงจะลดลงโดยให้ ทางเรียบเปลี่ยน.
ล็อค 4WD
สำหรับการขับขี่แบบพิเศษ เงื่อนไขที่ยากลำบากเช่น บนหิมะ คนขับสามารถเลือกโหมด "4WD Lock" ได้ เมื่อล็อกเปิดอยู่ ระบบจะยังกระจายแรงบิดระหว่างล้อหน้าและล้อหลังโดยอัตโนมัติ แต่แรงบิดส่วนใหญ่จะถูกส่งต่อไปยังล้อหลัง ตัวอย่างเช่น เมื่อเร่งความเร็วบนเนินเขา คลัตช์จะส่งแรงบิดส่วนใหญ่ไปยังล้อหลังทันทีเพื่อให้การยึดเกาะทั้งสี่ล้อ ในทางกลับกัน ระบบขับเคลื่อนสี่ล้ออัตโนมัติ "ตามต้องการ" จะ "รอ" ก่อนเพื่อให้ล้อหน้าลื่นไถล จากนั้นจึงส่งแรงบิดไปยังล้อหลังเท่านั้น ซึ่งอาจรบกวนการเร่งความเร็วได้
บนถนนแห้ง โหมด 4WD Lock จะเร่งความเร็วได้อย่างมีประสิทธิภาพ ส่งแรงบิดไปยังล้อหลังมากขึ้น ซึ่งให้กำลังมากกว่า บังคับรถได้ดีกว่าเมื่อเร่งความเร็วบนถนนที่มีหิมะหรือถนนที่หลวม และช่วยเพิ่มเสถียรภาพในการขับ ความเร็วสูง. สัดส่วนของแรงบิดล้อหลังเพิ่มขึ้น 50% เมื่อเทียบกับโหมดขับเคลื่อน 4 ล้อ ซึ่งหมายความว่าแรงบิดสูงสุด 60% ที่มีจะส่งไปยังล้อหลังเมื่อเหยียบคันเร่งจนสุดบนถนนแห้ง ในโหมดล็อค 4WD ในมุมแคบ แรงบิดของล้อหลังจะไม่ลดลงเท่ากับเมื่อขับในโหมด 4WD Auto
อัตราส่วนของแรงบิดต่อล้อหน้า / หลังในโหมด 4WD มีค่าดังต่อไปนี้:
| โหมดการขับขี่ | ถนนแห้ง | ถนนที่ปกคลุมไปด้วยหิมะ | ||
| ล้อ | ด้านหน้า | หลัง | ด้านหน้า | หลัง |
| อัตราเร่ง | 69% | 31% | 50% | 50% |
| ที่ 30 กม./ชม | ที่ 30 กม./ชม | ที่ 15 กม./ชม | ที่ 15 กม./ชม | |
| 85% | 15% | 64% | 36% | |
| ที่ 80 กม./ชม | ที่ 80 กม./ชม | ที่ 40 กม./ชม | ที่ 40 กม./ชม | |
| ความเร็วคงที่ | 84% | 16% | 74% | 26% |
| ที่ 80 กม./ชม | ที่ 80 กม./ชม | ที่ 40 กม./ชม | ที่ 40 กม./ชม | |
แบบแผนโครงสร้าง

ส่วนประกอบและฟังก์ชันของระบบ
|
ชื่อส่วนประกอบ |
การทำงาน |
|
|
|
ส่งสัญญาณต่อไปนี้ไปยัง 4WD-ECU ที่ต้องการผ่าน CAN
|
|
|
สวิตช์โหมดขับเคลื่อน 2WD/4WD/LOCK |
ส่งสัญญาณตำแหน่งสวิตช์โหมดขับเคลื่อนสำหรับ 4WD-ECU |
|
|
|
ระบบจะประเมิน สภาพถนนและตามสัญญาณจาก ECU แต่ละตัว สวิตช์โหมดขับเคลื่อนจะกำหนดแรงบิดที่ต้องการไปยังล้อหลัง การคำนวณค่าแรงจำกัดส่วนต่างที่เหมาะสมที่สุดโดยพิจารณาจากสภาพของรถและโหมดการขับขี่ปัจจุบันโดยอิงจากสัญญาณจาก ECU แต่ละตัว สวิตช์โหมดขับเคลื่อนจะควบคุมค่าปัจจุบันที่ส่งไปยังลิงก์ควบคุมอิเล็กทรอนิกส์ |
|
|
การจัดการประสิทธิภาพ (ตัวบ่งชี้การทำงาน 4WD และตัวบ่งชี้การล็อค) ในแผงหน้าปัด |
|
|
ควบคุมฟังก์ชันการวินิจฉัยตนเองและฟังก์ชันเฟลโอเวอร์ |
|
|
การควบคุมฟังก์ชันการวินิจฉัย (เข้ากันได้กับ MUT-III) |
|
|
ระบบควบคุมคลัตช์ไฟฟ้า |
4WD-ECU ส่งแรงบิดที่สอดคล้องกับค่าปัจจุบันไปยังล้อหลัง |
|
ตัวแสดงโหมดขับเคลื่อน
|
ที่ฝังอยู่ในแผงหน้าปัดระบุถึงโหมดสวิตช์โหมดการขับขี่ที่เลือก (ไม่แสดงในโหมด 2WD)
|
|
ขั้วต่อการวินิจฉัย |
แสดงรหัสการวินิจฉัยและสร้างการสื่อสารกับ MUT-III |
การกำหนดค่าระบบ

รูปแบบการควบคุม

แผนภาพการเดินสายควบคุมอิเล็กทรอนิกส์4 WD

ออกแบบ


ระบบควบคุมคลัตช์อิเล็กทรอนิกส์ประกอบด้วยตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) คลัตช์หลัก (คลัตช์หลัก) กลไกลูกเบี้ยวหลัก (ลูกเบี้ยวหลัก) ลูกบอล (บอล) กลไกลูกเบี้ยวควบคุม (ลูกเบี้ยวนักบิน) กระดอง (กระดอง) คลัตช์ควบคุม (นักบิน) คลัช ), เคสหลัง(ตัวเรือนด้านหลัง) ขดลวดแม่เหล็ก (ขดลวดแม่เหล็ก) และเพลา (เพลา)
- ตัวเรือนด้านหน้าเชื่อมต่อกับ เพลาคาร์ดานและหมุนด้วยเพลา
- ที่ด้านหน้าของตัวเรือน คลัตช์หลัก (คลัตช์หลัก) และคลัตช์ควบคุม (คลัตช์นักบิน) ถูกติดตั้งบนเพลา (เพลา) (คลัตช์ควบคุม (คลัตช์นักบิน) ติดตั้งผ่านตัวหยุดลูกเบี้ยว (ลูกเบี้ยวนำร่อง))
- เพลาถูกตาข่ายผ่านฟันด้วยเฟืองขับของเฟืองท้าย
การทำงาน
ปลดคลัตช์ (2WD: Magnetic coil de-energized)

แรงผลักดันจาก กล่องโอนผ่าน เพลาคาร์ดาน(เพลาใบพัด) ถูกย้ายไปยังด้านหน้าของตัวเรือน (ตัวเรือนด้านหน้า) เนื่องจากขดลวดแม่เหล็ก (ขดลวดแม่เหล็ก) ถูกปลดพลังงาน คลัตช์ควบคุม (คลัตช์นักบิน) และคลัตช์หลัก (คลัตช์หลัก) จะไม่ทำงานและแรงขับเคลื่อนจะไม่ถูกส่งไปยังเพลา (เพลา) และตัวขับเกียร์ (ตัวขับ) เฟืองท้าย) ของเฟืองท้าย
คลัตช์ทำงาน (4WD: ขดลวดแม่เหล็กแรงดันไฟฟ้า.)

แรงขับเคลื่อนจากเคสถ่ายโอนผ่านเพลาใบพัดจะถูกส่งไปยังตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) เมื่อขดลวดแม่เหล็กได้รับพลังงาน สนามแม่เหล็กจะถูกสร้างขึ้นระหว่างตัวเรือนด้านหลัง ซึ่งควบคุมโดยคลัตช์นักบินและอาร์เมเจอร์ สนามแม่เหล็กทำหน้าที่ควบคุมคลัตช์ (คลัตช์นักบิน) และอาร์เมเจอร์ (อาร์มาเจอร์) รวมถึงคลัตช์ (คลัตช์นักบิน) เมื่อคลัตช์ควบคุม (คลัตช์นักบิน) ทำงาน แรงขับเคลื่อนจะถูกส่งไปยังกลไกลูกเบี้ยวควบคุม (pilot cam) เพื่อตอบสนองต่อแรงนี้ ลูกบอล (ลูกบอล) ในกลไกลูกเบี้ยว (ลูกเบี้ยวหลัก) (ลูกเบี้ยวนำร่อง) จะถูกหดกลับและสร้างแรงกระตุ้นในการแปล แรงกระตุ้นนี้กระทำกับคลัตช์หลัก (คลัตช์หลัก) และแรงบิดจะถูกส่งไปยังล้อหลังผ่านเพลาและเฟืองขับเฟืองท้าย
โดยการปรับกระแสที่จ่ายให้กับขดลวดแม่เหล็ก ปริมาณแรงขับเคลื่อนที่ส่งไปยังล้อหลังสามารถปรับได้ตั้งแต่ 0 ถึง 100%
ลักษณะทางเทคนิคของ Mitsubishi Outlander ถูกกำหนดโดยสามตัวเลือกที่ใช้ โรงไฟฟ้า. น้ำมันเบนซินสอง "สี่" ที่มีปริมาตร 2.0 และ 2.4 ลิตรให้ 146 และ 167 แรงม้า ตามลำดับ ด้านบน สายมอเตอร์เป็นเครื่องยนต์ V6 ขนาด 3.0 ลิตร สำหรับรุ่น Mitsubishi Outlander Sport เขาพัฒนา พลังสูงสุด 230 แรงม้า และสร้างแรงบิด 292 นิวตันเมตร (ที่ 3750 รอบต่อนาที)
การปรับเปลี่ยนด้านบนของ Outlander เกี่ยวข้องกับการติดตั้งร่วมกับ หน่วยพลังงาน 6 สปีด กล่องอัตโนมัติเกียร์ ครอสโอเวอร์รุ่นอื่นติดตั้ง Jatco CVT รุ่นที่แปดพร้อมทอร์คคอนเวอร์เตอร์ ควบคู่ V6 230 แรงม้า และ 6AKPP จัดให้ รุ่นกีฬา Outlander ไดนามิกที่ดี - สูงถึง 100 กม. / ชม. รถเร่งใน 8.9 วินาที ตัวเลือกครอสโอเวอร์ซึ่งซ่อนหน่วย 4 สูบคู่ใด ๆ ไว้ใต้ประทุนไม่สามารถอวดความคล่องตัวดังกล่าวได้ ใช้เวลามากกว่า 10 วินาทีในการพุ่งไปที่ "หลายร้อย"
ปริมาณการใช้เชื้อเพลิงเฉลี่ยของ Mitsubishi Outlander แตกต่างกันไปจาก 7.3 ถึง 8.9 ลิตร "ไม่รู้จักพอ" ที่สุดคือ "หก" ขนาด 3.0 ลิตรตามข้อมูลหนังสือเดินทางซึ่งใช้เชื้อเพลิงประมาณ 12.2 ลิตรในวัฏจักรเมือง
พารามิเตอร์ทางเรขาคณิตของตัวรถนั้นน่าสนใจโดยหลักแล้วสำหรับความเท่าเทียมกันของมุมเข้าและออก ซึ่งแต่ละมุมไม่เกิน 21 องศา มุมลาดมีความสำคัญเท่ากัน กวาดล้าง(ระยะเว้น) Mitsubishi Outlander 215 mm.
ครอสโอเวอร์ญี่ปุ่นอยู่ด้านหน้าและ การปรับเปลี่ยนระบบขับเคลื่อนสี่ล้อ. ขับเคลื่อนล้อหน้ามีให้สำหรับรุ่นที่มีเครื่องยนต์ 2.0 ลิตร "จูเนียร์" เท่านั้น ขับเคลื่อนสี่ล้อมีสองรูปแบบที่เป็นไปได้: All Wheel Control (AWC) และ Super All Wheel Control (S-AWC) ตัวเลือกที่สอง ซึ่งเพิ่มความเสถียรในมุมที่มีความเร็วสูงและบนพื้นผิวที่ลื่น ได้รับการพัฒนาขึ้นสำหรับ Outlander Sport 3.0 โดยเฉพาะ
เทคนิค ลักษณะเฉพาะ มิตซูบิชิ Outlander - ตารางเดือย:
| พารามิเตอร์ | Outlander 2.0 CVT 146 HP | Outlander 2.4 CVT 167 HP | Outlander Sport 3.0 AT 230 HP | |
|---|---|---|---|---|
| เครื่องยนต์ | ||||
| ประเภทของเครื่องยนต์ | น้ำมันเบนซิน | |||
| ชนิดฉีด | แจกจ่าย | |||
| ซุปเปอร์ชาร์จ | ไม่ | |||
| จำนวนกระบอกสูบ | 4 | 6 | ||
| การจัดเรียงกระบอกสูบ | แถว | รูปตัววี | ||
| จำนวนวาล์วต่อสูบ | 4 | |||
| ปริมาณ, ลูกบาศ์ก. ซม. | 1998 | 2360 | 2998 | |
| กำลังแรงม้า (ที่รอบต่อนาที) | 146 (6000) | 167 (6000) | 230 (6250) | |
| 196 (4200) | 222 (4100) | 292 (3750) | ||
| การแพร่เชื้อ | ||||
| หน่วยไดรฟ์ | ด้านหน้า | เต็ม (AWC) | เต็ม (AWC) | เต็ม (S-AWC) |
| การแพร่เชื้อ | ไดรฟ์ความเร็วตัวแปร | 6เกียร์ออโต้ | ||
| ช่วงล่าง | ||||
| ชนิดกันสะเทือนหน้า | MacPherson ประเภทอิสระ | |||
| แบบกันสะเทือนหลัง | อิสระหลายลิงค์ | |||
| ระบบเบรก | ||||
| เบรคหน้า | แผ่นระบายอากาศ | |||
| เบรคหลัง | แผ่นระบายอากาศ | |||
| พวงมาลัย | ||||
| ประเภทเครื่องขยายเสียง | ไฟฟ้า | |||
| ยางและล้อ | ||||
| ขนาดยาง | 215/70 R16 | 225/55R18 | ||
| ขนาดดิสก์ | 6.5Jx16 | 7.0Jx18 | ||
| เชื้อเพลิง | ||||
| ประเภทเชื้อเพลิง | AI-92 | AI-95 | ||
| ปริมาณถัง l | 63 | 60 | 60 | |
| การบริโภคน้ำมันเชื้อเพลิง | ||||
| รอบเมือง l/100 km | 9.5 | 9.6 | 9.8 | 12.2 |
| รอบประเทศ l/100 km | 6.1 | 6.4 | 6.5 | 7.0 |
| รอบรวม l/100 km | 7.3 | 7.6 | 7.7 | 8.9 |
| ขนาด | ||||
| เลขที่นั่ง | 5 | |||
| ความยาว mm | 4695 | |||
| ความกว้าง mm | 1800 | |||
| ความสูง (พร้อมราวหลังคา) mm | 1680 | |||
| ฐานล้อ mm | 2670 | |||
| รางล้อหน้า mm | 1540 | |||
| รางล้อหลัง mm | 1540 | |||
| ปริมาณลำตัว (ต่ำสุด/สูงสุด), l | 591/1754 | 477/1640 | ||
| ระยะห่างจากพื้นดิน (ระยะห่าง), mm | 215 | |||
| น้ำหนัก | ||||
| พร้อมกก. | 1425 | 1490 | 1505 | 1580 |
| เต็มกก | 1985 | 2210 | 2270 | |
| น้ำหนักรถพ่วงสูงสุด (พร้อมเบรก), kg | 1600 | |||
| ลักษณะไดนามิก | ||||
| ความเร็วสูงสุดกม./ชม | 193 | 188 | 198 | 205 |
| เวลาเร่งความเร็วถึง 100 กม./ชม., s | 11.1 | 11.7 | 10.2 | 8.7 |
เครื่องยนต์ Mitsubishi Outlander - ข้อมูลจำเพาะ
มอเตอร์ทั้งสามตัวที่มีให้สำหรับครอสโอเวอร์ได้รับการติดตั้งระบบควบคุมการยกวาล์ว MIVEC ซึ่งช่วยให้สามารถเปลี่ยนโหมดการทำงานของวาล์ว (เวลาเปิด, เฟสทับซ้อนกัน) โดยขึ้นอยู่กับความเร็ว ซึ่งช่วยเพิ่มกำลังเครื่องยนต์ ประหยัดเชื้อเพลิง และลดการปล่อยมลพิษที่เป็นอันตราย
ลักษณะเฉพาะ เครื่องยนต์มิตซูบิชิคนต่างชาติ:
| พารามิเตอร์ | Outlander 2.0 146 แรงม้า | Outlander 2.4 167 แรงม้า | Outlander 3.0 230 แรงม้า |
|---|---|---|---|
| รหัสเครื่องยนต์ | 4B11 | 4B12 | 6B31 |
| ประเภทของเครื่องยนต์ | น้ำมันเบนซินที่ไม่มีเทอร์โบชาร์จ | ||
| ระบบอุปทาน | การฉีดแบบกระจาย ระบบอิเล็กทรอนิกส์ชุดควบคุมวาล์ว MIVEC, เพลาลูกเบี้ยวสองตัว (DOHC), ตัวขับโซ่ไทม์มิ่ง | การฉีดแบบกระจาย, ระบบควบคุมวาล์วอิเล็กทรอนิกส์ MIVEC, หนึ่งเพลาลูกเบี้ยวต่อถังสูบ (SOHC), สายพานไทม์มิ่งไดรฟ์ | |
| จำนวนกระบอกสูบ | 4 | 6 | |
| การจัดเรียงกระบอกสูบ | แถว | รูปตัววี | |
| จำนวนวาล์ว | 16 | 24 | |
| เส้นผ่านศูนย์กลางกระบอกสูบ mm | 86 | 88 | 87.6 |
| จังหวะลูกสูบ mm | 86 | 97 | 82.9 |
| อัตราการบีบอัด | 10:1 | 10.5:1 | |
| ปริมาณการทำงาน ลูกบาศ์ก ซม. | 1998 | 2360 | 2998 |
| กำลังแรงม้า (ที่รอบต่อนาที) | 146 (6000) | 167 (6000) | 230 (6250) |
| แรงบิด N*m (ที่รอบต่อนาที) | 196 (4200) | 222 (4100) | 292 (3750) |
ระบบขับเคลื่อนสี่ล้อ Mitsubishi Outlander
ระบบ All Wheel Control (AWC) เป็นโครงแบบขับเคลื่อนล้อหน้าโดยเชื่อมต่อเพลาล้อหลังโดยใช้ระบบควบคุมแบบอิเล็กทรอนิกส์ คลัตช์แม่เหล็กไฟฟ้า. สามารถย้อนกลับได้ถึง 50% ของแรงขับ มีสามโหมดการทำงาน ไดรฟ์ AWC- ECO อัตโนมัติและล็อค ในโหมดประหยัด แรงบิดทั้งหมดจะถูกถ่ายโอนไปยังเพลาหน้าโดยค่าเริ่มต้น และด้านหลังจะทำงานเมื่อลื่นไถลเท่านั้น โหมดอัตโนมัติจะกระจายความพยายามอย่างเหมาะสมที่สุด โดยพิจารณาจากข้อมูลที่ได้รับจากหน่วยอิเล็กทรอนิกส์ (ความเร็วล้อ ตำแหน่งแป้นคันเร่ง) โหมดล็อคจะเพิ่มปริมาณแรงบิดที่ส่งไปยังล้อหลัง ซึ่งรับประกันอัตราเร่งที่มั่นใจและพฤติกรรมที่เสถียรยิ่งขึ้นบนพื้นผิวที่ไม่เสถียร ความแตกต่างที่สำคัญระหว่าง Lock และ Auto คือล้อหลังในตอนแรกมีแรงฉุดมากขึ้นโดยไม่คำนึงว่าจะมีการตรวจพบการลื่นหรือไม่ 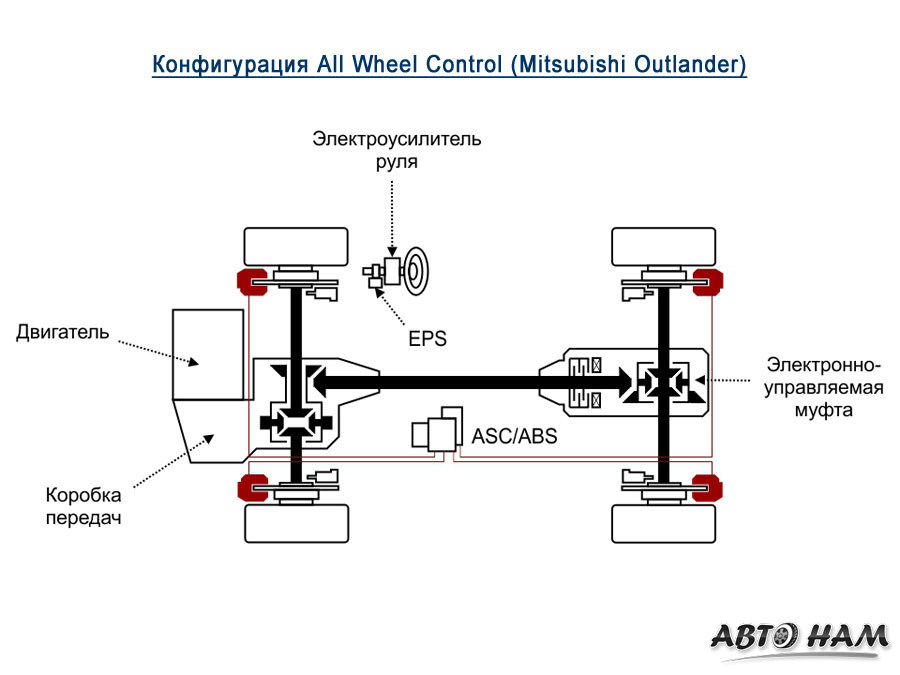
ระบบ Super All Wheel Control (S-AWC) เป็นรูปแบบขั้นสูงของ AWC แบบเดิม โดยติดตั้ง Active Differential (AFD) ไว้ที่เพลาหน้า เพื่อกระจายกำลังระหว่างล้อ ดังนั้นกลไกเพิ่มเติมในการควบคุมพฤติกรรมของรถจึงปรากฏขึ้น S-AWC ประกอบด้วยระบบกันสั่น, ABS, พวงมาลัยเพาเวอร์ไฟฟ้าและ ระบบเบรค. ดังนั้น ชุดควบคุมของระบบควบคุม Super All Wheel Control ภายใต้เงื่อนไขบางประการ สามารถเริ่มการเบรกของล้อได้ ตัวอย่างเช่น ในกรณีที่มีการดริฟท์ระหว่างทางโค้ง
ตัวเลือกโหมดการทำงานเต็มรูปแบบ ไดรฟ์ S-AWCมีสี่ตำแหน่ง: Eco, Normal, Snow และ Lock โหมดหิมะปรับการตั้งค่าระบบให้เหมาะสมสำหรับการขับขี่บนพื้นผิวที่ลื่น 
บรรพบุรุษของคลาสใหม่ที่เรียกว่า crossovers เป็นวิศวกรโซเวียตที่แปลกพอซึ่งในปี 1973 ได้ออกแบบรถยนต์นั่งเต็มรูปแบบตามหน่วยของ Zhiguli คลาสสิก ออฟโรดด้วยตัวรับน้ำหนัก VAZ-2121 "Niva" งานดังกล่าวถูกกำหนดโดยประธานคณะรัฐมนตรีของสหภาพโซเวียต Alexei Kosygin เป็นการส่วนตัวในฤดูร้อนปี 1970 เมื่อ VAZ ไม่ถึงขีดความสามารถในการออกแบบ!
การมองการณ์ไกลของทางการกลายเป็นที่ชัดเจนว่าในอีกสองทศวรรษข้างหน้าไม่มีใครในโลกนำเสนอคู่แข่งที่เพียงพอและสหภาพโซเวียตการพัฒนานี้ซึ่งเข้าสู่สายการผลิตในปี 2520 นำรายได้เงินตราต่างประเทศจำนวนมากและ ชื่อเสียงระดับโลก และเฉพาะในปี 1994 โตโยต้าญี่ปุ่นนำ RAV4 ออกสู่ตลาด เมื่อตรวจสอบอย่างละเอียดถี่ถ้วนแล้ว ปรากฏว่าไม่มีอะไรใหม่เข้ามาในแนวคิดนี้ แต่ชาวญี่ปุ่นทำสำเร็จในระดับที่สูงขึ้น ระดับเทคนิค. ตั้งแต่นั้นมาทั้งสองสัญญาณ "ทั่วไป" หลัก - ความสะดวกสบาย รถโดยสารและปรับปรุงตัวเลือก ความชัดเจนทางเรขาคณิต- ยังคงไม่เปลี่ยนแปลง แต่ด้วยการใช้ระบบขับเคลื่อนสี่ล้อ สถานการณ์จึงซับซ้อนกว่ามาก
จากพระนิพพานจนถึงปัจจุบัน
พิจารณาประเด็นหลักของวิวัฒนาการของระบบขับเคลื่อนสี่ล้อในรถยนต์ "ในเมือง"
Niva และ RAV4 สองรุ่นแรก (จนถึงปี 2548) มีระบบขับเคลื่อนสี่ล้อแบบกลไกถาวรพร้อมเฟืองกลางและเฟืองท้ายฟรี และไม่มีอุปกรณ์อิเล็กทรอนิกส์ควบคุม แม้จะมีความสามารถข้ามประเทศที่ดี แต่โครงการดังกล่าวไม่เหมาะกับรถยนต์นั่งส่วนบุคคลมากนัก - หน่วยส่งกำลังที่ซับซ้อนจำนวนมากและการสูญเสียทางกลในพวกเขาทำให้การดำเนินการมีค่าใช้จ่ายค่อนข้างสูงโดยเฉพาะอย่างยิ่งกับฉากหลังของราคาน้ำมันที่เพิ่มสูงขึ้นเรื่อย ๆ ใช่และรูปแบบดังกล่าวช่วยเพียงเล็กน้อยจากการแขวนในแนวทแยง ความพยายามครั้งแรกในการลด ด้านที่อ่อนแอโดยไม่บั่นทอนความสามารถในการข้ามประเทศ ฮอนด้ารับหน้าที่ CR-V ซึ่งเปิดตัวช้ากว่า RAV4 และสามารถคำนึงถึงความผิดพลาดของคู่แข่งได้
การพัฒนาอย่างรวดเร็ว อิเล็กทรอนิกส์ยานยนต์และเทคโนโลยีทำให้สามารถแก้ปัญหาการควบคุมเพลาที่เชื่อมต่อได้ในระดับใหม่: แทนที่จะเป็นคลัตช์หนืดแบบดั้งเดิมที่ทำงานบนหลักการเปิด / ปิด Toyota ในปี 2548 ได้ติดตั้งคลัตช์หลายแผ่น "เปียก" ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ในส่วนที่สาม รุ่น RAV4 โปรเซสเซอร์ 32 บิตอันทรงพลังในระบบนี้เปลี่ยนแรงบิดที่ส่งไปยังล้อหลังอย่างราบรื่นในช่วงกว้างตั้งแต่ 5% ไปจนถึงการบล็อกอย่างสมบูรณ์ในแบบเรียลไทม์ซึ่งควบคู่ไปกับ ระบบ ABSระบบควบคุมเสถียรภาพการทรงตัวและการควบคุมการยึดเกาะถนนทำให้พฤติกรรมของรถคาดเดาได้มากแม้กับผู้ขับขี่ที่ไม่มีประสบการณ์ในขณะที่ยังคงรักษาระดับ off-road ไว้สูง (ตามมาตรฐาน รถยนต์ด้วยระยะห่างจากพื้นดินที่เพิ่มขึ้น) ที่มีคุณภาพ
จริงอยู่มีแมลงวันตัวเล็ก ๆ ในครีมที่นี่: ที่โหลดสูงในโหมดการบล็อกแบบเต็มโหนดค่อนข้างร้อนมากเกินไปอันเป็นผลมาจากการป้องกันซอฟต์แวร์ถูกกระตุ้นและรถกลายเป็นระบบขับเคลื่อนล้อหน้าชั่วคราว ความเร็วของช่วงเวลาที่ไม่พึงประสงค์นี้ส่วนใหญ่ขึ้นอยู่กับพื้นที่ทำความเย็นและปริมาตรของน้ำมันที่เติม แต่ไม่สามารถยกเลิกได้อย่างสมบูรณ์ - นี่เป็นข้อบกพร่องโดยธรรมชาติในเกียร์เสียดสีใด ๆ ดังนั้นคุณไม่ควรเร่งครอสโอเวอร์อย่างเมามันในโคลนลึกหรือ หิมะสำหรับ SUV ที่เต็มเปี่ยม แบบแผนดังกล่าวที่มีการเปลี่ยนแปลงน้อยที่สุดได้กลายเป็นมาตรฐานโดยพฤตินัยในกลุ่มนี้ และ "การพุ่งพรวด" ได้ตกลงไปอยู่ด้านล่างสุดของเรตติ้งการขายหรือออกจากตลาดโดยสิ้นเชิง เช่น ซูซูกิ แกรนด์วิทารา.
เลือดน้อย
เป็นไปได้ไหมที่จะปรับปรุงความสามารถของการส่งสัญญาณดังกล่าวโดยไม่ทำให้ยุ่งยากเหมือนในตำนาน เมอร์เซเดส-เบนซ์ จี-คลาสหรือปฏิเสธที่จะติดตั้งบนล้อแต่ละล้อด้วยมอเตอร์ไฟฟ้าของตัวเอง? ค่อนข้าง! คำตอบของคำถามอยู่ที่การใช้เฟืองท้ายแบบไขว้ แต่ตอนนี้มีระดับการบล็อกที่ควบคุมตามเวลาจริงแล้ว หลักการของการใช้การส่งสัญญาณดังกล่าวไม่ใช่เรื่องใหม่อีกต่อไป ผู้บริโภคสามารถลองใช้กับรถเก๋งธุรกิจได้ ตำนานฮอนด้าและต่อไป มิตซูบิชิ แลนเซอร์วิวัฒนาการ. อย่างไรก็ตาม โซลูชั่นที่ใช้ในพวกเขา แม้ว่าจะแตกต่างกัน ระดับสูงความสง่างามทางเทคนิค มีประโยชน์น้อยสำหรับ ผู้บริโภคจำนวนมากเพราะความซับซ้อนและ ค่าใช้จ่ายสูงและมักไม่ค่อยมีทรัพยากร
แต่แม้กระทั่งที่นี่ คลัตช์หลายแผ่นที่ควบคุมด้วยไฟฟ้า "เปียก" ที่รู้จักกันดีก็มาช่วยไว้ได้ ด้วยการใช้ประโยชน์จากประสบการณ์ที่สั่งสมมา Mitsubishi ได้เพิ่มการบิดใหม่ให้กับ Outlander Sport ที่ได้รับการปรับปรุง - เฟืองท้ายแบบแอคทีฟด้านหน้า (AFD) พร้อมการกระจายแรงบิดที่ปรับได้ระหว่างล้อของเพลาหน้า พูดในภาษาทางเทคนิคแบบแห้ง มีการเพิ่มเครื่องมืออื่นสำหรับการควบคุมแบบแอ็คทีฟและการควบคุมเวกเตอร์แรงขับ โดยผสานกับระบบพวงมาลัยพาวเวอร์ (EPS) ระบบที่ใช้งาน ABS, ESP และระบบควบคุมการขับเคลื่อนเพลาล้อหลังที่เอาท์พุต เราได้รับระบบเจเนอเรชันใหม่ที่เรียกว่า S-AWC (Super All Wheel Control) แบบบินสูงเล็กน้อย
แตกต่างจากระบบขับเคลื่อนสี่ล้อทั่วไป S-AWC ประเมิน ความเร็วเชิงมุมรถและช่วยให้คุณรักษารถให้อยู่ในเส้นทางที่คนขับเลือกได้แม่นยำยิ่งขึ้น สิ่งนี้เปรียบเทียบทิศทางการเดินทางจริงของรถ (ตามข้อมูลจากเซ็นเซอร์ความเร่งตามยาวและด้านข้าง) กับทิศทางที่วางแผนไว้โดยคนขับ (ตามเซ็นเซอร์มุมบังคับเลี้ยว) และแก้ไขสำหรับอันเดอร์สเตียร์หรือโอเวอร์สเตียร์ที่อาจเกิดขึ้นสลับกันระหว่างการซ้อมรบ .
สำหรับคนขับ ดูเหมือนว่าตัวรถเองจะช่วยในโค้ง เช่น เลี้ยวซ้ายที่คมกริบด้วยความเร็วสูง โมเมนต์จะกระจายอย่างแข็งขัน ไม่เพียงแต่ระหว่างด้านหน้ากับ เพลาหลังเช่นเคย แต่ยังอยู่ระหว่างล้อของเพลาหน้าและรถถูกดึงเข้าสู่ทางเลี้ยวที่ต้องการทั้งๆ ที่แรงต้านของแรงเหวี่ยงหนีศูนย์กลาง
ระบบนี้มีประโยชน์อะไรบ้าง คนขับธรรมดา? ไม่ต้องสงสัย! เครื่องวัดรัศมีวงเลี้ยวที่บันทึกไว้หรือมิเตอร์เดียวกับที่รถเป่าน้อยกว่าในการทดสอบพื้นผิวคอนกรีตเปียกระหว่างทางออกจาก "งู" ใน ชีวิตจริงจะไม่บินลงคูน้ำหรือพลิกคว่ำ มาสายโดยบังเอิญกับการซ้อมรบหรือไม่คำนวณความเร็ว ตอนนี้ การรักษารถให้อยู่ในเส้นทางได้ง่ายขึ้นเมื่อมีน้ำแข็งและแอสฟัลต์ปะปนกันภายใต้หิมะบริสุทธิ์ และในสภาพออฟโรดที่สัมผัสได้เพียงปุ่มเดียว บังคับปิดกั้นเฟืองท้ายจะช่วยให้คุณกลับบ้านได้ตรงเวลาอย่างอบอุ่นและสบาย และไม่ต้องจมโคลนหลังรถไถไปยังหมู่บ้านข้างเคียง ไม่มีเวลาไปตกปลาบนตลิ่งสูงเมื่อฝนเริ่มตก ...
ระบบนี้ไม่ควรถือเป็นยาครอบจักรวาล แต่เรายอมรับว่ามันขยายความสามารถของเครื่องจักรได้อย่างมากไม่เพียงเท่านั้น แต่ยังรวมถึง ความปลอดภัยในการใช้งานบนถนน. อันที่จริงเรามี Mitsubishi Outlander ที่ดูคล้ายกันแต่ข้างในเปลี่ยนไป Outlander ที่คุ้นเคยซึ่งตอนนี้ "ล้าสมัย" ไม่ได้แย่ในตัวเองและบ่อยครั้งที่ความสามารถของมันถูกกำหนดโดยคุณภาพของยางและระยะห่างจากพื้น แต่ระบบนี้ซึ่งพวกเขาถูกขอให้จ่ายเพิ่มอีก 20,000 rubles มีประโยชน์มาก . ควรจะสันนิษฐานว่าในอนาคตอันใกล้นี้ คู่แข่งส่วนใหญ่จะได้ระบบที่คล้ายคลึงกัน เนื่องจากในระดับเทคนิคในปัจจุบัน การแนะนำโหนดใหม่ไม่จำเป็นต้องมีการปฏิวัติทางเทคโนโลยีครั้งใหม่ ความผิดหวังเพียงอย่างเดียวคือจนถึงตอนนี้ S-AWC มีเฉพาะในเครื่องจักรใน การกำหนดค่าสูงสุดสุดยอดด้วยน้ำมันเบนซิน V6 3.0 ลิตร (1,479,000 รูเบิล) ซึ่งมีส่วนแบ่งการขายน้อยมากและผู้ซื้อส่วนใหญ่ที่ยินดีจ่ายเพิ่มสำหรับระบบดังกล่าวในระดับการตัดแต่งยอดนิยมที่ง่ายกว่าด้วยเครื่องยนต์ 2.4 ลิตรสามารถเสียเปรียบคู่แข่งได้ หากพวกเขาจะมีเวลายื่นข้อเสนอที่น่าสนใจ CR-V ตัวแรกพุ่งชน RAV4 ได้อย่างไร...




