การวินิจฉัยและการซ่อมแซมระบบอิเล็กทรอนิกส์มิตซูบิชิ มิตซูบิชิ Outlander เกียร์ ขับเคลื่อนสี่ล้อ Mitsubishi Outlander 3 ขับเคลื่อนสี่ล้อ
ลักษณะทางเทคนิคของ Mitsubishi Outlander ถูกกำหนดโดยสามตัวเลือกสำหรับโรงไฟฟ้าที่ใช้ น้ำมันเบนซินสอง "สี่" ที่มีปริมาตร 2.0 และ 2.4 ลิตรให้ 146 และ 167 แรงม้า ตามลำดับ ด้านบน สายมอเตอร์เป็นเครื่องยนต์ V6 3.0 ลิตรที่ออกแบบมาสำหรับ รุ่นมิตซูบิชิเอาท์แลนเดอร์ สปอร์ต. พัฒนากำลังสูงสุด 230 แรงม้า และสร้างแรงบิด 292 นิวตันเมตร (ที่ 3750 รอบต่อนาที)
การดัดแปลงอันดับต้น ๆ ของ Outlander นั้นเกี่ยวข้องกับการติดตั้งเกียร์อัตโนมัติ 6 สปีดควบคู่กับชุดจ่ายไฟ ครอสโอเวอร์รุ่นอื่นติดตั้ง Jatco CVT รุ่นที่แปดพร้อมทอร์คคอนเวอร์เตอร์ ควบคู่ V6 230 แรงม้า และ 6AKPP จัดให้ รุ่นกีฬา Outlander ไดนามิกที่ดี - สูงถึง 100 กม. / ชม. รถเร่งใน 8.9 วินาที ตัวเลือกครอสโอเวอร์ซึ่งซ่อนหน่วย 4 สูบคู่ใด ๆ ไว้ใต้ประทุนไม่สามารถอวดความคล่องตัวดังกล่าวได้ ใช้เวลามากกว่า 10 วินาทีในการพุ่งไปที่ "หลายร้อย"
ปริมาณการใช้เชื้อเพลิงเฉลี่ยของ Mitsubishi Outlander แตกต่างกันไปจาก 7.3 ถึง 8.9 ลิตร "ไม่รู้จักพอ" ที่สุดคือ "หก" ขนาด 3.0 ลิตรตามข้อมูลหนังสือเดินทางซึ่งใช้เชื้อเพลิงประมาณ 12.2 ลิตรในวัฏจักรเมือง
พารามิเตอร์ทางเรขาคณิตของตัวรถนั้นน่าสนใจโดยหลักแล้วสำหรับความเท่าเทียมกันของมุมเข้าและออก ซึ่งแต่ละมุมไม่เกิน 21 องศา มุมลาดมีความสำคัญเท่ากัน กวาดล้าง(ระยะเว้น) Mitsubishi Outlander 215 mm.
ครอสโอเวอร์ญี่ปุ่นมีให้เลือกทั้งรุ่นขับเคลื่อนล้อหน้าและขับเคลื่อนสี่ล้อ ระบบขับเคลื่อนล้อหน้ามีให้สำหรับรุ่นที่มีเครื่องยนต์ 2.0 ลิตร "จูเนียร์" เท่านั้น ระบบขับเคลื่อนสี่ล้อมีสองรูปแบบที่เป็นไปได้: All Wheel Control (AWC) และ Super All Wheel Control (S-AWC) ตัวเลือกที่สอง ซึ่งเพิ่มความเสถียรในมุมที่มีความเร็วสูงและบนพื้นผิวที่ลื่น ได้รับการพัฒนาขึ้นสำหรับ Outlander Sport 3.0 โดยเฉพาะ
เทคนิค ลักษณะเฉพาะ มิตซูบิชิ Outlander - ตารางเดือย:
| พารามิเตอร์ | Outlander 2.0 CVT 146 HP | Outlander 2.4 CVT 167 HP | Outlander Sport 3.0 AT 230 HP | |
|---|---|---|---|---|
| เครื่องยนต์ | ||||
| ประเภทของเครื่องยนต์ | น้ำมันเบนซิน | |||
| ชนิดฉีด | แจกจ่าย | |||
| ซุปเปอร์ชาร์จ | ไม่ | |||
| จำนวนกระบอกสูบ | 4 | 6 | ||
| การจัดเรียงกระบอกสูบ | แถว | รูปตัววี | ||
| จำนวนวาล์วต่อสูบ | 4 | |||
| ปริมาณ, ลูกบาศ์ก. ซม. | 1998 | 2360 | 2998 | |
| กำลังแรงม้า (ที่รอบต่อนาที) | 146 (6000) | 167 (6000) | 230 (6250) | |
| 196 (4200) | 222 (4100) | 292 (3750) | ||
| การแพร่เชื้อ | ||||
| หน่วยไดรฟ์ | ด้านหน้า | เต็ม (AWC) | เต็ม (AWC) | เต็ม (S-AWC) |
| การแพร่เชื้อ | ไดรฟ์ความเร็วตัวแปร | 6เกียร์ออโต้ | ||
| ช่วงล่าง | ||||
| ชนิดกันสะเทือนหน้า | MacPherson ประเภทอิสระ | |||
| แบบกันสะเทือนหลัง | อิสระหลายลิงค์ | |||
| ระบบเบรก | ||||
| เบรคหน้า | แผ่นระบายอากาศ | |||
| เบรคหลัง | แผ่นระบายอากาศ | |||
| พวงมาลัย | ||||
| ประเภทเครื่องขยายเสียง | ไฟฟ้า | |||
| ยางและล้อ | ||||
| ขนาดยาง | 215/70 R16 | 225/55 R18 | ||
| ขนาดดิสก์ | 6.5Jx16 | 7.0Jx18 | ||
| เชื้อเพลิง | ||||
| ประเภทเชื้อเพลิง | AI-92 | AI-95 | ||
| ปริมาณถัง l | 63 | 60 | 60 | |
| การบริโภคน้ำมันเชื้อเพลิง | ||||
| รอบเมือง l/100 km | 9.5 | 9.6 | 9.8 | 12.2 |
| รอบประเทศ l/100 km | 6.1 | 6.4 | 6.5 | 7.0 |
| รอบรวม l/100 km | 7.3 | 7.6 | 7.7 | 8.9 |
| ขนาด | ||||
| เลขที่นั่ง | 5 | |||
| ความยาว mm | 4695 | |||
| ความกว้าง mm | 1800 | |||
| ความสูง (พร้อมราวหลังคา) mm | 1680 | |||
| ฐานล้อ mm | 2670 | |||
| รางล้อหน้า mm | 1540 | |||
| รางล้อหลัง mm | 1540 | |||
| ปริมาณลำตัว (ต่ำสุด/สูงสุด), l | 591/1754 | 477/1640 | ||
| ระยะห่างจากพื้นดิน (ระยะห่าง), mm | 215 | |||
| น้ำหนัก | ||||
| พร้อมกก. | 1425 | 1490 | 1505 | 1580 |
| เต็มกก | 1985 | 2210 | 2270 | |
| น้ำหนักรถพ่วงสูงสุด (พร้อมเบรก), kg | 1600 | |||
| ลักษณะไดนามิก | ||||
| ความเร็วสูงสุดกม./ชม | 193 | 188 | 198 | 205 |
| เวลาเร่งความเร็วถึง 100 กม./ชม., s | 11.1 | 11.7 | 10.2 | 8.7 |
เครื่องยนต์ Mitsubishi Outlander - ข้อมูลจำเพาะ
มอเตอร์ทั้งสามตัวที่มีให้สำหรับครอสโอเวอร์ได้รับการติดตั้งระบบควบคุมการยกวาล์ว MIVEC ซึ่งช่วยให้สามารถเปลี่ยนโหมดการทำงานของวาล์ว (เวลาเปิด เฟสทับซ้อนกัน) โดยขึ้นอยู่กับความเร็ว ซึ่งช่วยเพิ่มกำลังเครื่องยนต์ ประหยัดเชื้อเพลิง และลดการปล่อยมลพิษที่เป็นอันตราย
ลักษณะเฉพาะ เครื่องยนต์มิตซูบิชิคนต่างชาติ:
| พารามิเตอร์ | Outlander 2.0 146 แรงม้า | Outlander 2.4 167 แรงม้า | Outlander 3.0 230 แรงม้า |
|---|---|---|---|
| รหัสเครื่องยนต์ | 4B11 | 4B12 | 6B31 |
| ประเภทของเครื่องยนต์ | น้ำมันเบนซินที่ไม่มีเทอร์โบชาร์จ | ||
| ระบบอุปทาน | การฉีดแบบกระจาย, ระบบควบคุมวาล์วอิเล็กทรอนิกส์ MIVEC, สองเพลาลูกเบี้ยว (DOHC), ไดรฟ์โซ่ไทม์มิ่ง | การฉีดแบบกระจาย, ระบบควบคุมวาล์วอิเล็กทรอนิกส์ MIVEC, หนึ่งเพลาลูกเบี้ยวต่อถังสูบ (SOHC), สายพานไทม์มิ่งไดรฟ์ | |
| จำนวนกระบอกสูบ | 4 | 6 | |
| การจัดเรียงกระบอกสูบ | แถว | รูปตัววี | |
| จำนวนวาล์ว | 16 | 24 | |
| เส้นผ่านศูนย์กลางกระบอกสูบ mm | 86 | 88 | 87.6 |
| จังหวะลูกสูบ mm | 86 | 97 | 82.9 |
| อัตราการบีบอัด | 10:1 | 10.5:1 | |
| ปริมาณการทำงาน ลูกบาศ์ก ซม. | 1998 | 2360 | 2998 |
| กำลังแรงม้า (ที่รอบต่อนาที) | 146 (6000) | 167 (6000) | 230 (6250) |
| แรงบิด N*m (ที่รอบต่อนาที) | 196 (4200) | 222 (4100) | 292 (3750) |
ระบบขับเคลื่อนสี่ล้อ Mitsubishi Outlander
ระบบควบคุมล้อทั้งหมด (AWC) เป็นโครงแบบขับเคลื่อนล้อหน้าโดยเชื่อมต่อเพลาล้อหลังโดยใช้คลัตช์แม่เหล็กไฟฟ้าที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ สามารถย้อนกลับได้ถึง 50% ของแรงขับ มีสามโหมดการทำงานของไดรฟ์ AWC - ECO อัตโนมัติและล็อค ในโหมดประหยัด แรงบิดทั้งหมดจะถูกถ่ายโอนไปยังเพลาหน้าโดยค่าเริ่มต้น และด้านหลังจะทำงานเมื่อลื่นไถลเท่านั้น โหมดอัตโนมัติกระจายแรงอย่างเหมาะสมตามค่าที่ได้รับ หน่วยอิเล็กทรอนิกส์ข้อมูล (ความเร็วล้อ ตำแหน่งแป้นคันเร่ง) โหมดล็อคจะเพิ่มปริมาณแรงบิดที่ส่งไปยังล้อหลัง ซึ่งรับประกันอัตราเร่งที่มั่นใจและพฤติกรรมที่เสถียรยิ่งขึ้นบนพื้นผิวที่ไม่เสถียร ความแตกต่างที่สำคัญระหว่าง Lock และ Auto คือล้อหลังในตอนแรกมีแรงฉุดมากขึ้นโดยไม่คำนึงว่าจะมีการตรวจพบการลื่นหรือไม่ 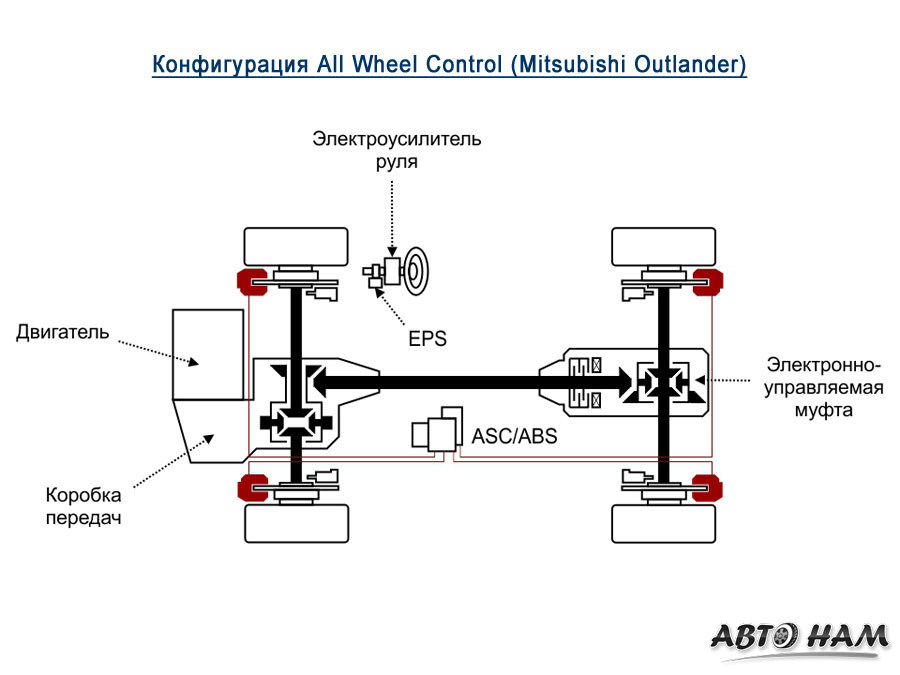
ระบบ Super All Wheel Control (S-AWC) เป็นรูปแบบขั้นสูงของ AWC แบบเดิม โดยติดตั้ง Active Differential (AFD) ที่เพลาหน้า เพื่อกระจายกำลังระหว่างล้อ ดังนั้นกลไกเพิ่มเติมในการควบคุมพฤติกรรมของรถจึงปรากฏขึ้น S-AWC มีระบบป้องกันภาพสั่นไหว, ABS, พวงมาลัยเพาเวอร์ไฟฟ้าและระบบเบรก ดังนั้น ชุดควบคุมของระบบควบคุม Super All Wheel Control ภายใต้เงื่อนไขบางประการ สามารถเริ่มการเบรกของล้อได้ ตัวอย่างเช่น ในกรณีที่มีการดริฟท์ระหว่างทางโค้ง
ตัวเลือกโหมดการทำงาน ขับเคลื่อนสี่ล้อ S-AWC มีสี่ตำแหน่ง: Eco, Normal, Snow และ Lock โหมดหิมะปรับการตั้งค่าระบบให้เหมาะสมสำหรับการขับขี่บนพื้นผิวที่ลื่น 
ระบบขับเคลื่อนสี่ล้อ "ของจริง" ที่ใช้กันทั่วไปส่วนใหญ่ใช้กับระบบขับเคลื่อนล้อหน้าดั้งเดิมเกือบทั้งหมด มีความแตกต่างสามประการที่นี่ ส่วนต่างศูนย์กลาง (ขึ้นอยู่กับรูปแบบเฉพาะในตัวเรือนกระปุกหรือตัวเรือนกล่องโอน) ถูกบล็อกและช่วงเวลามีการกระจายอย่างสม่ำเสมอระหว่างเพลา หลักการนี้คล้ายคลึงกัน
- ข้อดี - เสถียรภาพบนท้องถนน ความสามารถในการคาดการณ์เชิงสัมพันธ์ ความสามารถในการข้ามประเทศที่ดีและความน่าเชื่อถือ
- จุดด้อย - ค่าสัมประสิทธิ์การบล็อกไม่เพียงพอด้วยการมีเพศสัมพันธ์หนืดและความเร็วของ "การทำงาน"
| แบบอย่าง | การดัดแปลง |
| แลนเซอร์-มิราจ-ลิเบโร | (CCxA*) ฟัก พ.ศ. 2534-2539 (CDxA) 2534-2539, (CDxW) กระดิก 2535-2542 |
| แลนเซอร์ มิราจ | (CLxA) 1996-2001 (รถยนต์), (CMxA) 1996-2000 (ซีดาน) |
| แลนเซอร์ | Evolution IV (CN9A) 1996.09-1998.02, AYC - ตัวเลือกสำหรับ GSR |
| แลนเซอร์ | Evolution V (CP9A) 1998.02-1999.01, AYC - ตัวเลือกสำหรับ GSR99, ตอบกลับ - LSD (อาร์เอส/GSR99) |
| แลนเซอร์ | Evolution VI (CP9A) 1999.01-2000.03, AYC สำหรับ GSR2000 |
| Galant-Emeraude-Eterna | (E7xA, E8xA) 2535-2539 |
| Galant Legnum | (ECxA, ECxW) 2539-2546 |
| Galant Legnum | (EC5A/EC5W) VR-4 (AYC สำหรับทุกคน) 1996-2002 |
| RVR | (N1xW/N2xW) 1991 - 1997.08 |
| RVR | (N6xW/N7xW) 1997.09 - 2003.01 |
| รถม้า/แกรนดิส | (N3xW/N4xW) 1992.06 - 1997.07 |
| รถม้า/แกรนดิส | (N8xW/N9xW) 1997.08 - 2002 |
| Diamante Sigma | (F2xA) (เก๋ง) 1990.05-1994.11 |
| เพชร | (F4xA) (รถเก๋ง) 1994.12-2002.10 |
| GTO/3000GT | (Z1xA) 1990.10-2000.09 |
| Airtrek / Outlander | (CUxW) 2001.03-… |
[ซ่อน]
VCU
ที่จะเปิดเผย...
การค่อยๆ เคลื่อนออกจาก 4WD เต็มรูปแบบได้รับการสนับสนุนจากผู้ผลิตรถยนต์ญี่ปุ่นทุกราย และ MMC ก็ไม่มีข้อยกเว้น
โครงร่างที่มี VCU (Viscous Coupling Unit) นั้นคล้ายกับ Toyota V-Flex II - ไม่มีส่วนต่างของศูนย์กลางอยู่ในนั้นช่วงเวลานั้นถูกนำไปตามเพลาคาร์ดานด้านหลังซึ่งติดตั้งอยู่ด้านหน้ากระปุกเกียร์ เชื่อมต่อก้านคาร์ดานและเพลาอินพุตของกระปุกเกียร์ด้วยการลื่นไถลของล้อหน้าอย่างมีนัยสำคัญ เวลาที่เหลือรถยังคงขับเคลื่อนล้อหน้า ติดตั้งเฟืองท้าย LSD แบบเสียดทานเสริมแล้ว
- ข้อดี - ความเรียบง่ายและราคาถูก
- ข้อเสีย - พฤติกรรมไม่เพียงพอระหว่างการขับขี่แบบแอ็คทีฟ, ค่าสัมประสิทธิ์การบล็อกไม่เพียงพอ, ความเร็วในการตอบสนองต่ำ
| แบบอย่าง | การดัดแปลง |
| แลนเซอร์ ซีเดีย | (CSxA, CSxW) 2000.05-… |
| มิราจ ดิงโก้ | (CQxA) 1999.01-2002.12 |
| ดิออน | (CRxW) 2000.01-… |
| eK Sport-เกวียน-Classy | (H81W) 2001.09-… |
| eK Active | (xBA-H81W) 2004.05 -… |
| มินิกา | (H12V/H15A) 2527-2531 |
| มินิกา | (H26A/H27A/H27V) 1990.02-1993.08 |
| มินิกา | (H36A/H37A) 1993.08-1998 |
| มินิกา | (H46A/H47A) 1998.08-… |
| มินิกา ท็อปโป | (H27A/H27V) 1990.02-1993.08 |
| มินิกา ท็อปโป | (H36A/H37V) 1993.08-1997.10 |
| ToppoBJ | (H46A/H47A) 1998.08-2003.08 |
| ToppoBJ ไวด์ | (H48A) 1998.08-2001.06 |
| ค้นใหม่ | (Z2xA) 2002.11-… |
| Colt Plus ใหม่ | (Z2xW) 2004.10-… |
[ซ่อน]
เลือกหลายรายการ
ที่จะเปิดเผย...
แน่นอนว่ารูปแบบที่ทันสมัยในขณะนี้พร้อมเพลาล้อหลังที่เชื่อมต่อด้วยคลัตช์ไฟฟ้าซึ่งสอดคล้องไม่ได้ยืนเคียงข้างกัน
 ในโหมด "2WD" ไดรฟ์จะดำเนินการที่ล้อหน้าเท่านั้น ในโหมด "4WD" ภายใต้สภาวะปกติ ล้อหน้ามีส่วนเกี่ยวข้อง แต่ขึ้นอยู่กับสภาพการขับขี่ หน่วยควบคุมสามารถแจกจ่ายช่วงเวลาไปยังเพลาล้อหลังโดยอัตโนมัติ ในโหมด "ล็อก" (ที่ความเร็วต่ำ) คลัตช์จะถูกบล็อกโดยสมบูรณ์ ในขณะที่โมเมนต์ถูกแบ่งระหว่างเพลาเกือบเท่าๆ กัน
ในโหมด "2WD" ไดรฟ์จะดำเนินการที่ล้อหน้าเท่านั้น ในโหมด "4WD" ภายใต้สภาวะปกติ ล้อหน้ามีส่วนเกี่ยวข้อง แต่ขึ้นอยู่กับสภาพการขับขี่ หน่วยควบคุมสามารถแจกจ่ายช่วงเวลาไปยังเพลาล้อหลังโดยอัตโนมัติ ในโหมด "ล็อก" (ที่ความเร็วต่ำ) คลัตช์จะถูกบล็อกโดยสมบูรณ์ ในขณะที่โมเมนต์ถูกแบ่งระหว่างเพลาเกือบเท่าๆ กัน
- ข้อดี - การเชื่อมต่อล้อหลังทำได้ "สมเหตุสมผลกว่า" มากกว่าในรูปแบบ VCU เป็นไปได้ที่จะเปิดใช้งานระบบขับเคลื่อนสี่ล้อแบบแข็ง
- จุดด้อย - ความอยู่รอดไม่สูงมาก ความไม่เพียงพอของการทำงานในโหมด "4WD"
[ซ่อน]
ACD+AYC
ที่จะเปิดเผย...
ต้องยอมรับว่าระบบขับเคลื่อนสี่ล้อสำหรับผู้โดยสารที่ทันสมัยที่สุดในโลกได้รับการพัฒนาโดย MMC - สำหรับคนรุ่นต่างๆ แลนเซอร์ อีโววิธีการแก้.
มีส่วนต่างระหว่างเพลาซึ่งถูกบล็อกโดยอัตโนมัติโดยคลัตช์ไฮโดรแมคคานิคัลที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ (ACD) และผู้ขับขี่สามารถเลือก "ความแข็งแกร่ง" ของการบล็อกได้อย่างอิสระ
องค์ประกอบที่สำคัญที่สุดที่สองคือใช้งานอยู่ เฟืองท้าย(เอวายซี). ช่วยให้คุณปรับแรงบิดที่ส่งจากเครื่องยนต์ไปยังล้อหลังซ้ายและขวาได้ ขึ้นอยู่กับพื้นผิว ตำแหน่งของพวงมาลัยและแป้นคันเร่ง ความเร็วล้อ และความเร็วของรถ ในทางกลับกัน ช่วงเวลาที่ยิ่งใหญ่ที่สุดจะถูกส่งไปยังล้อด้านนอก ซึ่งจะสร้างโมเมนต์การหมุนเพิ่มเติม บนพื้นผิวที่ลื่นหรือไม่สม่ำเสมอ AYC จะแทนที่เฟืองท้ายแบบล็อคตัวเอง (แรงบิดส่วนใหญ่จะไปที่ล้อด้วยการยึดเกาะที่ดีที่สุด) เริ่มต้นด้วย วิวัฒนาการ VIIIใช้ส่วนต่าง Super-AYC ที่ปรับปรุงแล้ว ซึ่งแตกต่างแทนที่จะใช้รูปแบบการควบคุมรูปกรวยและผลป้อนกลับ
- ข้อดี - ความสามารถในการข้ามประเทศ, การควบคุม, "ปัญญา" สูงสุด
- ข้อเสีย - ความซับซ้อนและต้นทุนของการออกแบบ
[ซ่อน]
งานพาร์ทไทม์ (EasySelect)
ที่จะเปิดเผย...
 หนึ่งในประเภท 4WD ที่ง่ายที่สุด (ในบางรุ่นเรียกว่า EasySelect) - พร้อมเพลาหน้าแบบเสียบปลั๊กไม่มี ดิฟเฟอเรนเชียล- ใช้กับรุ่นขับเคลื่อนล้อหลังเดิม
หนึ่งในประเภท 4WD ที่ง่ายที่สุด (ในบางรุ่นเรียกว่า EasySelect) - พร้อมเพลาหน้าแบบเสียบปลั๊กไม่มี ดิฟเฟอเรนเชียล- ใช้กับรุ่นขับเคลื่อนล้อหลังเดิม
โครงการนี้จัดให้มีการควบคุมโดยตรงของกรณีการโอนโดยใช้คันโยก ในขั้นต้น เพลาขับด้านหน้าเชื่อมต่อกับล้อโดยใช้ล้ออิสระแบบกลไกแบบแมนนวลหรือแบบอัตโนมัติ ("ฮับ") ในรุ่นที่ใหม่กว่า เพื่ออำนวยความสะดวกในกระบวนการเชื่อมต่อเพลาหน้า จะใช้ระบบ ADD ซึ่งใช้ตัวกระตุ้นแบบนิวแมติกเพื่อตัดการเชื่อมต่อเพลาหน้าตัวใดตัวหนึ่ง
- ข้อดี - ความเรียบง่ายของการออกแบบ การมีอยู่ของ downshift
- ข้อเสีย - โหมด "4WD" สามารถใช้ได้เฉพาะบนพื้นผิวที่ลื่น (น้ำแข็ง หิมะ ถนนเปียก) และในระยะเวลาที่จำกัด - มิฉะนั้น เสียงรบกวน การสิ้นเปลืองน้ำมันเชื้อเพลิงเพิ่มขึ้น การเสื่อมสภาพในการควบคุม ยางและส่วนประกอบเกียร์เสื่อมสภาพ ฮับ "แบบแมนนวล" มีความน่าเชื่อถือ แต่ไม่สะดวกในการใช้งาน และฮับอัตโนมัติอยู่ไกลจากอุดมคติในแง่ของความอยู่รอด
| แบบอย่าง | การดัดแปลง |
| Pajero III | (V64W/V74W) 1999.06-… (ตัวเลือก - LSD ไฮบริดด้านหลัง / DiffLock) |
| ชาเลนเจอร์/ ปาเจโร สปอร์ต / มอนเตโร สปอร์ต | (K9xW) 1996.05-… (ตัวเลือก - LSD ไฮบริดด้านหลัง) |
| L200 / สตราดา | (K7xT) 1996.12-… (ตัวเลือก - LSD แรงเสียดทานด้านหลัง / DiffLock) |
| เดลิก้า สเปซเกียร์ | (PDxW/PExW/PFxW) 1994.03-… (ตัวเลือก - LSD แรงเสียดทานด้านหลัง / LSD ไฮบริด) |
| Pajero II | (V2xW/V4xW) 1990.10-1999.11 (อุปกรณ์เสริม - LSD แรงเสียดทานด้านหลัง / LSD ไฮบริด / DiffLock) |
| L200/สตราดา | (K3xT) 1991.03-1997.05 (อุปกรณ์เสริม - LSD แรงเสียดทานด้านหลัง) |
| เดลิก้า สตาร์ วากอน/L300 | 1987.09-1999.06 (P2xW/P3xW/P4xW) (อุปกรณ์เสริม - LSD แรงเสียดทานด้านหลัง) |
| ปาเจโร่ มินิ | (H56A/H58A) 1996.06-… |
| ปาเจโร่ จูเนียร์ | (H57A) 1995.10-1998.04 |
| กล่องเมือง | (U62W/U62V/U62T/U64W) 1998.11-… (ตัวเลือก - LSD แรงเสียดทานด้านหลัง) |
| Town Box Wide | (U66W) 1999.04-2001.06 (อุปกรณ์เสริม - LSD แรงเสียดทานด้านหลัง) |
ส่วนหนึ่งของ Pajero III ได้รับเป็นตัวเลือก MATC (Mitsubishi Active ระบบควบคุมการลื่นไถล) ระบบควบคุมการยึดเกาะถนนแบบไดนามิกที่ทำงานเป็นระบบกันลื่นบนถนนลาดยาง และบนทางวิบากจำลองการบล็อกเฟืองท้ายหน้าและหลัง ทำให้ล้อลื่นไถลช้าลง ในโหมด 4H ความสามารถในการขับขี่แบบออฟโรดจึงดีขึ้นอย่างเห็นได้ชัดโดยไม่ต้องใช้เซ็นทรัลล็อก ระบบนี้จะวิเคราะห์สภาพการขับขี่ผ่านเซ็นเซอร์ที่วัดความเร็ว แรงบิดของตัวรถและการเร่งความเร็วด้านข้าง ตลอดจนมุมบังคับเลี้ยวและความเร่งตามยาว ข้อเสีย - ประสิทธิภาพน้อยกว่าเมื่อเทียบกับ DiffLock การสึกหรอที่ไม่สม่ำเสมอของแผ่นรองอาจเป็นไปได้ เมื่อ ABS เข้าสู่โหมดฉุกเฉิน การปิดกั้นจะหายไป
พร้อมระบบส่งกำลัง ซุปเปอร์ซีเล็คถูกใช้ครั้งแรกโดยสิ่งที่เรียกว่า เอบีเอสมัลติโหมด เบรกหน้าและหลังควบคุมโดยช่องอิสระสามช่อง ซึ่งช่วยให้คุณใช้แรงเบรกที่เหมาะสมกับล้อแต่ละล้อได้อย่างแม่นยำ อย่างไรก็ตาม เมื่อล็อกเฟืองท้ายตรงกลาง การลากล้อที่แตกต่างกันและแรงเบรกที่ต่างกันอาจทำให้เกียร์ "บิด" และรถสั่นได้ มิตซูบิชิได้แก้ไขปัญหานี้เป็นครั้งแรกในโลกด้วยการสร้าง ABS แบบหลายโหมด ซึ่งทำงานในโหมดเฟืองท้ายที่ล็อคไว้ด้วยเช่นกัน
ระบบ AWC มีสามโหมดที่ควบคุมโดยหน่วยอิเล็กทรอนิกส์โดยใช้คำสั่งลูกบิดบนคอนโซลกลาง:
- 2WD(เรียกว่า 4WD ECO ในบางตลาด): ขับเคลื่อนล้อหน้าอย่างเป็นทางการ โหมดนี้เกี่ยวข้องกับการถ่ายโอนแรงบิดจำนวนเล็กน้อยไปยังล้อหลังเพื่อลดเสียงรบกวนจากเพลาล้อหลัง ตามรายงานบางฉบับ ในโหมดนี้ การถ่ายโอนแรงบิดไปยังเพลาล้อหลังสามารถเกิดขึ้นได้ด้วยการเลื่อนหลุดที่เห็นได้ชัดเจน
- 4WD อัตโนมัติ: จ่ายแรงบิดสูงสุด 40% ให้กับล้อหลัง ขึ้นอยู่กับตำแหน่งของแป้นคันเร่ง (ยิ่งกดมาก ปิดมากขึ้นคลัตช์) ความแตกต่างระหว่างความเร็วของล้อหน้าและล้อหลัง (จะปิดเมื่อมีการเลื่อนหลุดและเปิดขึ้นเมื่อไม่อยู่) และความเร็วของรถ เมื่อเหยียบคันเร่งเต็มที่ แรงขับจะถูกส่งกลับมากถึง 40% ที่ความเร็วมากกว่า 64 กม. / ชม. การถ่ายโอนแรงบิดจะลดลงเหลือ 25% ที่ความเร็วคงที่ แรงบิดสูงสุด 15% จะถูกส่งไปยังล้อหลัง และที่ความเร็วต่ำในมุมแคบ การปิดคัปปลิ้งจะลดลง ทำให้การเข้าโค้งเป็นไปอย่างราบรื่น
- 4WD ล็อค: คลัตช์ปิดโดยไม่ต้องรอการลื่นไถล และที่ความเร็วต่ำจะส่งถึง 60% ของโมเมนต์ไปที่ล้อหลัง (เมื่อเหยียบคันเร่งจนสุดบนถนนที่แห้ง) และที่ความเร็วสูง โมเมนต์จะกระจายเท่าๆ กันระหว่าง เพลา ในมุมแคบ แรงบิดที่เพลาล้อหลังในโหมดนี้ก็ไม่ลดลงมากเท่ากับใน 4WD Auto
ในทุกโหมด ระบบอิเล็กทรอนิกส์ยังคงเปลี่ยนระดับการปิดคลัตช์ อย่างไรก็ตาม โครงสร้างไม่สามารถปิดได้สนิท กล่าวคือ มีการลื่นไถลและเกิดความร้อนในคลัตช์อยู่เสมอ บทบาทของล็อคระหว่างล้อถูกกำหนดให้กับระบบรักษาเสถียรภาพซึ่งทำให้ล้อลื่นไถลช้าลง
| โหมดการขับขี่ | ถนนแห้ง | ถนนที่ปกคลุมไปด้วยหิมะ | ||
| ล้อ | ด้านหน้า | หลัง | ด้านหน้า | หลัง |
| อัตราเร่ง | 69% | 31% | 50% | 50% |
| ที่ 30 กม./ชม | ที่ 15 กม./ชม | |||
| 85% | 15% | 64% | 36% | |
| ที่ 80 กม./ชม | ที่ 40 กม./ชม | |||
| ความเร็วคงที่ | 84% | 16% | 74% | 26% |
| ที่ 80 กม./ชม | ที่ 40 กม./ชม | |||
เนื่องจากคลัตช์ร้อนเกินไปอย่างต่อเนื่องและไม่สามารถรับน้ำหนักที่สังเกตได้เป็นเวลานาน ไดรฟ์ประเภทนี้จึงถือว่าสมบูรณ์ด้วยการยืดที่กว้างมากและเหมาะสำหรับการปรับปรุงการควบคุมบนพื้นผิวที่แข็งเท่านั้น ใช้นอกเหนือจาก Outlander XL, ASX และ Lancer ล่าสุดด้วย
ที่จะเปิดเผย...

ส่วนประกอบและหน้าที่:
| ส่วนประกอบ | การทำงาน |
| ECU เครื่องยนต์ | |
| ABS/ASC-ECU | ส่งผ่านสัญญาณ CAN ที่กำหนดโดย 4WD-ECU:
|
| สวิตช์โหมดขับเคลื่อน 2WD/4WD/LOCK | แปลตำแหน่งของสวิตช์โหมดขับเคลื่อน (2WD/4WD/LOCK) สำหรับ 4WD-ECU |
| ETACS-ECU |
|
| 4WD-ECU | ระบบจะประเมินสภาพถนนและตามสัญญาณจาก ECU ทั้งหมดและสวิตช์โหมดขับเคลื่อน กำหนดปริมาณแรงบิดที่ต้องการไปยังล้อหลัง การคำนวณกำลังอัดคลัตช์ที่เหมาะสมที่สุดโดยพิจารณาจากสภาพการขับขี่และโหมดการขับเคลื่อนปัจจุบันตามสัญญาณจาก ECU ทั้งหมดและสวิตช์โหมดขับเคลื่อน |
| การจัดการไฟแสดงการทำงานของ 4WD และตัวแสดงการล็อคในแผงหน้าปัด | |
| การจัดการฟังก์ชันการวินิจฉัยตนเองและความทนทานต่อข้อผิดพลาด | |
| การควบคุมฟังก์ชันการวินิจฉัย (เข้ากันได้กับ MUT-III) | |
| ระบบควบคุมคลัตช์ไฟฟ้า | 4WD-ECU ส่งแรงบิดที่สอดคล้องกับสภาวะปัจจุบันไปยังล้อหลังผ่านคลัตช์ |
ตัวแสดงโหมดขับเคลื่อน
| ไฟแสดงสถานะในตัวในแผงหน้าปัดระบุถึงโหมดสวิตช์โหมดการขับขี่ที่เลือก (ไม่แสดงในโหมด 2WD)
|
| ขั้วต่อการวินิจฉัย | เอาต์พุตของรหัสการวินิจฉัยและการสื่อสารกับ MUT-III |
การกำหนดค่าระบบ:

รูปแบบการควบคุม:

แผนภาพการเดินสายควบคุมอิเล็กทรอนิกส์ AWC:

การออกแบบเครื่องกล:


ระบบควบคุมคลัตช์อิเล็กทรอนิกส์ประกอบด้วยตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) คลัตช์หลัก (คลัตช์หลัก) กลไกลูกเบี้ยวหลัก (ลูกเบี้ยวหลัก) ลูกบอล (บอล) กลไกลูกเบี้ยวควบคุม (ลูกเบี้ยวนักบิน) กระดอง (กระดอง) คลัตช์ควบคุม (นักบิน) คลัช ), เคสหลัง(ตัวเรือนด้านหลัง) ขดลวดแม่เหล็ก (ขดลวดแม่เหล็ก) และเพลา (เพลา)
- ตัวเรือนด้านหน้าเชื่อมต่อกับแกนคาร์ดานและหมุนด้วยเพลา
- ที่ด้านหน้าของตัวเรือน คลัตช์หลัก (คลัตช์หลัก) และคลัตช์ควบคุม (คลัตช์นักบิน) จะถูกติดตั้งบนเพลา (เพลา) ในขณะที่คลัตช์ควบคุม (คลัตช์นักบิน) ถูกติดตั้งผ่านตัวหยุดลูกเบี้ยว (pilot cam)
[ซ่อน]
การทำงานของระบบ
ที่จะเปิดเผย...
ปลดคลัตช์ (2WD) ช่วงเวลาจากกล่องถ่ายโอนผ่านเพลาคาร์ดาน (เพลาใบพัด) จะถูกส่งไปยังด้านหน้าของตัวเรือน (ตัวเรือนด้านหน้า) เพราะ ขดลวดแม่เหล็กไฟฟ้า (ขดลวดแม่เหล็ก) ถูกยกเลิกการจ่ายพลังงาน คลัตช์นำร่องและคลัตช์หลักไม่ทำงาน และแรงขับเคลื่อนจะไม่ถูกส่งไปยังเพลา (เพลา) และตัวขับเฟือง (เฟืองขับ) ของเฟืองท้าย

คลัตช์ทำงาน (4WD) ช่วงเวลาจากกล่องถ่ายโอนผ่านเพลาคาร์ดาน (เพลาใบพัด) จะถูกส่งไปยังด้านหน้าของตัวเรือน (ตัวเรือนด้านหน้า) เพราะ ขดลวดแม่เหล็กไฟฟ้า (ขดลวดแม่เหล็ก) ได้รับพลังงาน สนามแม่เหล็กถูกสร้างขึ้นระหว่างตัวเรือนด้านหลัง (ตัวเรือนด้านหลัง) แรงเสียดทานที่ควบคุม (คลัตช์นักบิน) และเกราะ (กระดอง) สนามแม่เหล็กทำหน้าที่ควบคุมคลัตช์และข้อต่อและเปิดคลัตช์ เมื่อคลัตช์ควบคุมทำงาน แรงบิดจะถูกส่งไปยังกลไกลูกเบี้ยวควบคุม (pilot cam) เพื่อตอบสนองต่อแรงนี้ ลูกบอล (ลูกบอล) ในกลไกลูกเบี้ยว (ลูกเบี้ยวหลัก) (ลูกเบี้ยวนำร่อง) จะถูกหดกลับและสร้างแรงกระตุ้นในการแปล แรงกระตุ้นนี้กระทำกับคลัตช์หลัก และแรงบิดจะถูกส่งไปยังล้อหลังผ่านเพลาและเฟืองขับเฟืองท้าย
![]()
โมเมนต์ที่ส่งไปยังล้อหลังจะถูกควบคุมโดยการเปลี่ยนกระแสไฟที่จ่ายให้กับไขลานคลัตช์
[ซ่อน]
[ซ่อน]
S-AWC และ Twin Motor 4WD
ที่จะเปิดเผย...
นอกเหนือจากการอัพเดท Outlander XL (ตอนนี้คือ Outlander Sport) และการสูญเสียการออกแบบที่ดุดันจาก Akinori Nakanishi ไดรฟ์ AWC ที่มีข้อบกพร่องในรุ่นท็อปของรุ่นก็ถูกแทนที่ด้วย Super-AWC หรือ S- เอดับบลิว. อันที่จริง นี่คือไดรฟ์ ACD + AYC ที่ได้รับการดัดแปลงตามที่กล่าวไว้ข้างต้น โดยที่ส่วนต่างของศูนย์ ACD จะถูกแทนที่ด้วยเฟืองท้ายแบบแอ็คทีฟ LSD แบบแม่เหล็กไฟฟ้าของ AFD และเสริมด้วยตัวช่วยแบบอิเล็กทรอนิกส์ (ระบบบังคับเลี้ยว EPS เพื่อทำให้กระตุกจากการทำงานของ AFD, ABS ที่ทำงานอยู่ และ ESP ราบรื่นขึ้น ระบบ) S-AWC ตั้งอยู่บนหลักการของการควบคุมเวกเตอร์แรงขับ เมื่อการควบคุมอัตโนมัติของส่วนหน้า คลัตช์เพลาล้อหลัง เบรก และพวงมาลัยเพาเวอร์จะกระจายช่วงเวลาที่ส่งไปยังล้อทุกล้อ ปัจจัยสำคัญคือระบบคำนึงถึงความเร็วเชิงมุมด้วย

ระบบ S-AWC มีการกำหนดค่าสามแบบ (หนึ่งในนั้น - ACD + AYC ดั้งเดิม - ถือเป็นข้อมูลอ้างอิง):

เฟืองท้าย AFD LSD ที่ใช้ในเกียร์ S-AWC โดยพื้นฐานแล้วจะเป็นคลัตช์แม่เหล็กไฟฟ้า และเช่นเดียวกับ AYC ที่สามารถควบคุมแรงบิดที่ส่งไปยังล้อหน้าได้ กลไกการล็อคผลิตโดย บริษัท GKN ของอังกฤษ - ยังจัดหาคลัตช์กลางด้วย ในการบีบคลัตช์ ชุดควบคุมระบบขับเคลื่อนสี่ล้อจะจ่ายกระแสไฟให้กับขดลวดแม่เหล็กไฟฟ้า และหากความเร็วของการหมุนของล้อหน้ามีความแตกต่างกัน แผ่นดิสก์ทั้งสองของกลไกแรงดันของลูกบอลจะหมุนสัมพันธ์กัน ทำให้เกิด แรงตามแนวแกนที่บีบอัดคลัตช์ (เช่นเดียวกับในชุดเกียร์ AWC) ระดับของล็อกเฟืองท้ายเปลี่ยนแปลงตลอดเวลาโดยระบบอิเล็กทรอนิกส์ แต่ไม่สามารถเชื่อมต่อแบบแข็งระหว่างเพลาเพลาได้ เหล่านั้น. ในสภาวะที่ยากลำบาก AYC บนเพลาล้อหลังจะไม่สร้างสภาพอากาศ เนื่องจากช่วงเวลาที่เหมาะสมจะไม่กระทบ และโดยทั่วไปเพลาหลังสามารถปิดได้เนื่องจากความร้อนสูงเกินไปเมื่อใดก็ได้

การส่งสัญญาณ S-AWC มีสี่โหมดการทำงาน:
- AWC ECOจ่ายแรงบิดให้กับเพลาหน้าเท่านั้น (“เพื่อประหยัดเชื้อเพลิง”) และเชื่อมต่อเพลาล้อหลังเมื่อลื่นไถลเท่านั้น
- ปกติกระจายแรงบิดอย่างเหมาะสมไปยังล้อทุกล้อตามสภาพถนน
- หิมะออกแบบมาสำหรับหิมะ น้ำแข็ง และพื้นผิวลื่นอื่นๆ
- ล็อคปิดดิฟเฟอเรนเชียลทั้งหมด ให้ศักยภาพออฟโรดสูงสุด
นอกจากนี้ กรณีแยกกันเป็นตัวเลือกที่เพลาหน้าและเพลาหลังไม่ได้เชื่อมต่อกันเลย และแต่ละอันขับเคลื่อนโดยมอเตอร์ไฟฟ้าของตัวเองอย่างอิสระ:

นอกจากนี้ยังมีการวางอุบายที่นี่เพราะ ตามข้อมูลต่างๆ จาก Mitsubishi เดียวกัน ทั้งเฟืองท้าย AYC และเฟืองท้ายแบบเปิดทั่วไปสามารถใช้กับเพลาได้ หรือตัวอย่างเช่นบนเพลาหน้า - เปิดและด้านหลัง - AYC
Twin Motors 4WD มีเพียงสองโหมด - "NORMAL" สำหรับสภาวะปกติและ "4WD LOCK" สำหรับโหมดที่ยากลำบาก ในเวลาเดียวกัน การทดสอบ Autoreview แสดงให้เห็นว่าเกียร์ Twin Motor 4WD ไม่สามารถเอาชนะสภาวะที่ยากลำบากได้ จากคำว่า "แน่นอน":
ก่อนอื่นเราไปที่ซึ่งเป็นเรื่องปกติที่จะใช้ระบบขับเคลื่อนสี่ล้อในฤดูหนาว - ท่ามกลางหิมะ เริ่มต้นด้วยไฮบริดและ... จบทันที: PHEV ติดทันที! ... อัลกอริทึมของโรงไฟฟ้าเป็นเรื่องลึกลับ เหยียบคันเร่งแล้วหมุนเฉพาะเพลาหน้า และครั้งต่อไปที่ล้อหลังเริ่มหมุน แต่ล้อหน้าเข้าที่ คุณปล่อยคันเร่งขวา - และการหมุนจะดำเนินต่อไปชั่วขณะหนึ่ง!

มิตซูบิชิได้ศึกษาการใช้ระบบขับเคลื่อนสี่ล้อในทางปฏิบัติเพื่อพิจารณาว่าโซลูชันทางเทคโนโลยีใดที่เหมาะสมที่สุดสำหรับรถยนต์ประเภทนี้ และสะดวกที่สุดสำหรับเจ้าของรถครอสโอเวอร์ขนาดกะทัดรัดนี้ในอนาคต
วิศวกรหันหลังให้กับโซลูชันแบบเดิม นั่นคือการใช้เกียร์อัตโนมัติที่มีการเชื่อมต่อแบบขับเคลื่อนสี่ล้อแบบออนดีมานด์ ระบบดังกล่าวมีพื้นฐานมาจากข้อเท็จจริงที่ว่าเมื่อล้อหน้าลื่นไถล แรงบิดส่วนหนึ่งจะถูกส่งไปยังล้อหลัง ผู้เชี่ยวชาญของ Mitsubishi เข้าใจดีว่าผู้บริโภคสนใจระบบที่ลดโอกาสที่ล้อจะลื่นมากขึ้น
Outlander รุ่นก่อนใช้ระบบขับเคลื่อนสี่ล้อเต็มเวลาพร้อมเฟืองท้ายแบบล็อกหนืด ไดรฟ์แบบแบ่งส่วน 50:50 ให้ประสิทธิภาพที่ยอดเยี่ยมในสภาพอากาศที่รุนแรง แต่การสิ้นเปลืองเชื้อเพลิงสูงสำหรับการใช้งานทุกวัน Mitsubishi ตั้งเป้าที่จะให้ Outlander ใหม่มีสมรรถนะเทียบเท่าหรือดีกว่าในการใช้งานหนัก โดยมีการเปลี่ยนแปลงการสิ้นเปลืองเชื้อเพลิงเพียงเล็กน้อย
นี่คือลักษณะที่ระบบเกียร์ขับเคลื่อนสี่ล้อของ MITSUBISHI AWC (All Wheel Control) ปรากฏขึ้น จากภาษาอังกฤษ All Wheel Control แปลตามตัวอักษรว่าเป็นการควบคุมล้อทั้งหมด ระบบนี้ช่วยให้ผู้ขับขี่สามารถเลือกประเภทของไดรฟ์ได้ ระบบนี้เป็นการผสมผสานระหว่างความพิเศษ เกียร์ขับเคลื่อนสี่ล้อ Multi-Select 4WD และ การกระจายทางอิเล็กทรอนิกส์แรงบิดและนอกจากนี้ระบบกันลื่นที่ทันสมัยและระบบ เสถียรภาพของอัตราแลกเปลี่ยน. ต้องขอบคุณระบบ AWC ทำให้ล้อรถมีแรงฉุดลากที่ยอดเยี่ยมกับถนน และการควบคุมที่ยอดเยี่ยมบนส่วนที่ลื่นของลู่วิ่ง เพื่อให้แน่ใจว่ามีการทำงานที่เหมาะสมที่สุดของการส่งสัญญาณ การเลือกโหมดใดโหมดหนึ่งจากสามโหมดที่แสดงบน . ก็เพียงพอแล้ว คอนโซลกลาง"2WD", "4WD" หรือ "ล็อค"
| โหมดการขับขี่ | คำอธิบาย | ข้อดี |
| 2WD | ส่งแรงบิดไปที่ล้อหน้า | ประหยัดน้ำมันมากขึ้น เสียงรบกวนของรถลดลง การควบคุมที่ดีขึ้น สิ่งนี้ยังรักษาความเป็นไปได้ที่ชุดควบคุมจะส่งแรงบิดไปยังเพลาล้อหลังเพื่อลดเสียงรบกวน |
| 4WD อัตโนมัติ | มันกำหนดทิศทางของแรงบิดไปที่ล้อหลังขึ้นอยู่กับตำแหน่งของคันเร่งและความแตกต่างของความเร็วของล้อหน้าและล้อหลัง | การกระจายแรงบิดที่เหมาะสมที่สุดสำหรับสภาวะการขับขี่ที่กำหนด การกระจายแรงบิดระหว่างเพลาหน้าและเพลาหลังจะดำเนินการโดยอัตโนมัติโดยหน่วยอิเล็กทรอนิกส์ ขึ้นอยู่กับพารามิเตอร์ในการขับขี่ของรถ (ความเร็วล้อหน้าและล้อหลัง ตำแหน่งแป้นคันเร่ง และความเร็วของรถ) แนะนำให้ใช้โหมดขับเคลื่อน 2 ล้อ |
| 4WD ล็อค | ส่งแรงบิดไปที่ล้อหลังมากกว่าโหมด 4WD ถึง 1.5 เท่า | เพิ่มการยึดเกาะ ให้การทรงตัวที่ความเร็วสูง และการลอยตัวที่ดีขึ้นบนพื้นผิวที่ไม่เรียบหรือลื่น โหมด LOCK คล้ายกับโหมด 4WD แต่มีการปรับเปลี่ยนกฎการกระจายแรงบิดระหว่างเพลา บน ความเร็วต่ำบน เพลาหลังให้แรงบิดเพิ่มขึ้น 1.5 เท่า และที่ความเร็วสูง แรงบิดจะกระจายอย่างเท่าเทียมกันระหว่างเพลา |
โหมดขับเคลื่อนสองโหมด
4WD อัตโนมัติ
เมื่อเลือก "4WD Auto" ระบบขับเคลื่อนสี่ล้อ 4WD ของ Outlander จะกระจายแรงบิดส่วนหนึ่งไปยังล้อหลังอย่างต่อเนื่อง ซึ่งจะเพิ่มอัตราส่วนนี้โดยอัตโนมัติเมื่อเหยียบคันเร่ง คลัตช์ส่งแรงฉุดลากไปยังล้อหลังถึง 40% เมื่อเค้นเต็มที่ และลดสิ่งนี้ได้มากถึง 25% ที่ความเร็วมากกว่า 40 ไมล์ต่อชั่วโมง ในการเคลื่อนที่อย่างมั่นคงที่ความเร็วการล่องเรือ แรงบิดสูงสุด 15% ที่มีอยู่จะถูกส่งไปยังล้อหลัง ที่ความเร็วต่ำในโค้งแคบ แรงจะลดลง ทำให้เข้าโค้งได้อย่างราบรื่น
4WD ล็อค
สำหรับการขับขี่ในสภาวะที่ยากลำบากโดยเฉพาะ เช่น หิมะ ผู้ขับขี่สามารถเลือกโหมด "4WD Lock" ได้ เมื่อเปิดล็อค ระบบจะยังกระจายแรงบิดระหว่างด้านหน้าและ .โดยอัตโนมัติ ล้อหลังแต่แรงบิดส่วนใหญ่จะถูกส่งไปยังล้อหลัง ตัวอย่างเช่น เมื่อเร่งความเร็วบนเนินเขา คลัตช์จะส่งแรงบิดส่วนใหญ่ไปยังล้อหลังทันทีเพื่อให้การยึดเกาะทั้งสี่ล้อ ในทางกลับกัน ระบบขับเคลื่อนสี่ล้ออัตโนมัติ "ตามต้องการ" จะ "รอ" ก่อนเพื่อให้ล้อหน้าลื่นไถล จากนั้นจึงส่งแรงบิดไปยังล้อหลังเท่านั้น ซึ่งอาจรบกวนการเร่งความเร็วได้
บนถนนแห้ง โหมด 4WD Lock จะเร่งความเร็วได้อย่างมีประสิทธิภาพ ส่งแรงบิดไปที่ล้อหลังมากขึ้นเพื่อให้มีกำลังมากขึ้น ควบคุมรถได้ดีขึ้นเมื่อเร่งความเร็วบนถนนที่มีหิมะหรือถนนที่หลวม และมีเสถียรภาพที่ดีขึ้นเมื่อขับด้วยความเร็วสูง สัดส่วนของแรงบิดล้อหลังเพิ่มขึ้น 50% เมื่อเทียบกับโหมดขับเคลื่อน 4 ล้อ ซึ่งหมายความว่าแรงบิดสูงสุด 60% ที่มีจะส่งไปยังล้อหลังเมื่อเหยียบคันเร่งจนสุดบนถนนแห้ง ในโหมดล็อค 4WD ในมุมแคบ แรงบิดของล้อหลังจะไม่ลดลงเท่ากับเมื่อขับในโหมด 4WD Auto
อัตราส่วนของแรงบิดต่อล้อหน้า / หลังในโหมด 4WD มีค่าดังต่อไปนี้:
| โหมดการขับขี่ | ถนนแห้ง | ถนนที่ปกคลุมไปด้วยหิมะ | ||
| ล้อ | ด้านหน้า | หลัง | ด้านหน้า | หลัง |
| อัตราเร่ง | 69% | 31% | 50% | 50% |
| ที่ 30 กม./ชม | ที่ 30 กม./ชม | ที่ 15 กม./ชม | ที่ 15 กม./ชม | |
| 85% | 15% | 64% | 36% | |
| ที่ 80 กม./ชม | ที่ 80 กม./ชม | ที่ 40 กม./ชม | ที่ 40 กม./ชม | |
| ความเร็วคงที่ | 84% | 16% | 74% | 26% |
| ที่ 80 กม./ชม | ที่ 80 กม./ชม | ที่ 40 กม./ชม | ที่ 40 กม./ชม | |
แบบแผนโครงสร้าง

ส่วนประกอบและฟังก์ชันของระบบ
|
ชื่อส่วนประกอบ |
การทำงาน |
|
|
|
ส่งสัญญาณต่อไปนี้ไปยัง 4WD-ECU ที่ต้องการผ่าน CAN
|
|
|
สวิตช์โหมดขับเคลื่อน 2WD/4WD/LOCK |
ส่งสัญญาณตำแหน่งสวิตช์โหมดขับเคลื่อนสำหรับ 4WD-ECU |
|
|
|
ระบบจะประเมิน สภาพถนนและตามสัญญาณจาก ECU แต่ละตัว สวิตช์โหมดขับเคลื่อนจะกำหนดแรงบิดที่ต้องการไปยังล้อหลัง การคำนวณค่าแรงจำกัดส่วนต่างที่เหมาะสมที่สุดโดยพิจารณาจากสภาพของรถและโหมดการขับปัจจุบันโดยพิจารณาจากสัญญาณจาก ECU แต่ละตัว สวิตช์โหมดขับเคลื่อน จะควบคุมค่าปัจจุบันที่ส่งไปยังลิงก์ควบคุมอิเล็กทรอนิกส์ |
|
|
การจัดการประสิทธิภาพ (ตัวบ่งชี้การทำงาน 4WD และตัวบ่งชี้การล็อค) ในแผงหน้าปัด |
|
|
ควบคุมฟังก์ชันการวินิจฉัยตนเองและฟังก์ชันเฟลโอเวอร์ |
|
|
การควบคุมฟังก์ชันการวินิจฉัย (เข้ากันได้กับ MUT-III) |
|
|
ระบบควบคุมคลัตช์ไฟฟ้า |
4WD-ECU ส่งแรงบิดที่สอดคล้องกับค่าปัจจุบันไปยังล้อหลัง |
|
ตัวแสดงโหมดขับเคลื่อน
|
ที่ฝังอยู่ในแผงหน้าปัดระบุถึงโหมดสวิตช์โหมดการขับขี่ที่เลือก (ไม่แสดงในโหมด 2WD)
|
|
ขั้วต่อการวินิจฉัย |
แสดงรหัสการวินิจฉัยและสร้างการสื่อสารกับ MUT-III |
การกำหนดค่าระบบ

รูปแบบการควบคุม

แผนภาพการเดินสายควบคุมอิเล็กทรอนิกส์4 WD

ออกแบบ


ระบบควบคุมคลัตช์อิเล็กทรอนิกส์ประกอบด้วยตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) คลัตช์หลัก (คลัตช์หลัก) กลไกลูกเบี้ยวหลัก (ลูกเบี้ยวหลัก) ลูกบอล (บอล) กลไกลูกเบี้ยวควบคุม (ลูกเบี้ยวนักบิน) กระดอง (กระดอง) คลัตช์ควบคุม (นักบิน) คลัตช์ ) ตัวเรือนด้านหลัง (ตัวเรือนด้านหลัง) คอยล์แม่เหล็ก (คอยล์แม่เหล็ก) และเพลา (เพลา)
- ตัวเรือนด้านหน้าเชื่อมต่อกับ เพลาคาร์ดานและหมุนด้วยเพลา
- ที่ด้านหน้าของตัวเรือน คลัตช์หลัก (คลัตช์หลัก) และคลัตช์ควบคุม (คลัตช์นักบิน) ถูกติดตั้งบนเพลา (เพลา) (คลัตช์ควบคุม (คลัตช์นักบิน) ติดตั้งผ่านตัวหยุดลูกเบี้ยว (ลูกเบี้ยวนำร่อง))
- เพลาถูกตาข่ายผ่านฟันด้วยเฟืองขับของเฟืองท้าย
การทำงาน
ปลดคลัตช์ (2WD: Magnetic coil de-energized)

แรงขับเคลื่อนจากเคสถ่ายโอนผ่านเพลาใบพัดจะถูกส่งไปยังตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) เนื่องจากขดลวดแม่เหล็ก (ขดลวดแม่เหล็ก) ถูกปลดพลังงาน คลัตช์ควบคุม (คลัตช์นักบิน) และคลัตช์หลัก (คลัตช์หลัก) จะไม่ทำงานและแรงขับเคลื่อนจะไม่ถูกส่งไปยังเพลา (เพลา) และตัวขับเกียร์ (ตัวขับ) เฟืองท้าย) ของเฟืองท้าย
การทำงานของคลัตช์ (4WD: ขดลวดแม่เหล็กแบบมีกำลัง)

แรงขับเคลื่อนจากเคสถ่ายโอนผ่านเพลาใบพัดจะถูกส่งไปยังตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) เมื่อขดลวดแม่เหล็กได้รับพลังงาน สนามแม่เหล็กจะถูกสร้างขึ้นระหว่างตัวเรือนด้านหลัง ซึ่งควบคุมโดยคลัตช์นักบินและอาร์เมเจอร์ สนามแม่เหล็กทำหน้าที่ควบคุมคลัตช์ (คลัตช์นักบิน) และอาร์เมเจอร์ (อาร์มาเจอร์) รวมถึงคลัตช์ (คลัตช์นักบิน) เมื่อคลัตช์ควบคุม (คลัตช์นักบิน) ทำงาน แรงขับเคลื่อนจะถูกส่งไปยังกลไกลูกเบี้ยวควบคุม (pilot cam) เพื่อตอบสนองต่อแรงนี้ ลูกบอล (ลูกบอล) ในกลไกลูกเบี้ยว (ลูกเบี้ยวหลัก) (ลูกเบี้ยวนำร่อง) จะถูกหดกลับและสร้างแรงกระตุ้นในการแปล แรงกระตุ้นนี้กระทำกับคลัตช์หลัก (คลัตช์หลัก) และแรงบิดจะถูกส่งไปยังล้อหลังผ่านเพลาและเฟืองขับเฟืองท้าย
โดยการปรับกระแสที่จ่ายให้กับขดลวดแม่เหล็ก ปริมาณแรงขับเคลื่อนที่ส่งไปยังล้อหลังสามารถปรับได้ตั้งแต่ 0 ถึง 100%

ในทางปฏิบัติ Mitsubishi ได้ศึกษาการใช้ระบบขับเคลื่อนสี่ล้อเพื่อพิจารณาว่าโซลูชันทางเทคโนโลยีใดเหมาะสมที่สุดสำหรับ ประเภทนี้รถยนต์และสะดวกที่สุดสำหรับเจ้าของรถครอสโอเวอร์ขนาดกะทัดรัดคันนี้ในอนาคต
วิศวกรหันหลังให้โซลูชันแบบเดิม - การใช้ เกียร์อัตโนมัติด้วยระบบขับเคลื่อนสี่ล้อ "ตามต้องการ" ระบบดังกล่าวมีพื้นฐานมาจากข้อเท็จจริงที่ว่าเมื่อล้อหน้าลื่นไถล แรงบิดส่วนหนึ่งจะถูกส่งไปยังล้อหลัง ผู้เชี่ยวชาญของ Mitsubishi เข้าใจดีว่าผู้บริโภคสนใจระบบที่ลดโอกาสที่ล้อจะลื่นมากขึ้น
Outlander รุ่นก่อนมีระบบขับเคลื่อนสี่ล้อแบบถาวรพร้อมเฟืองท้ายแบบล็อคคัปปลิ้งแบบหนืด การกระจายตัวของไดรฟ์แบบ 50:50 ระบบนี้ให้ประสิทธิภาพที่ดีเยี่ยมในการทำงานหนัก สภาพอากาศ, แต่สำหรับ การทำงานประจำวันการบริโภคน้ำมันเชื้อเพลิงสูง มิตซูบิชิพยายามที่จะให้ ใหม่ Outlanderเหมือนกันหรือ คุณสมบัติที่ดีที่สุดเมื่อนำมาใช้ใน เงื่อนไขที่ยากลำบากโดยมีการเปลี่ยนแปลงอัตราการสิ้นเปลืองเชื้อเพลิงเพียงเล็กน้อย
นี่คือลักษณะที่ระบบเกียร์ขับเคลื่อนสี่ล้อของ MITSUBISHI AWC (All Wheel Control) ปรากฏขึ้น จาก ของภาษาอังกฤษ All Wheel Control แปลตามตัวอักษรว่าเป็นการควบคุมล้อทั้งหมด ระบบนี้ช่วยให้ผู้ขับขี่สามารถเลือกประเภทของไดรฟ์ได้ ระบบนี้เป็นการผสมผสานระหว่างระบบส่งกำลังแบบขับเคลื่อนสี่ล้อแบบพิเศษ Multi-Select 4WD และการกระจายแรงบิดแบบอิเล็กทรอนิกส์ และนอกจากนี้ ระบบควบคุมการยึดเกาะถนน ระบบที่ทันสมัยและระบบควบคุมเสถียรภาพการทรงตัว ต้องขอบคุณระบบ AWC ที่ทำให้ล้อรถมีแรงฉุดเกาะถนนได้ดีเยี่ยม และการบังคับรถที่ดีเยี่ยมบนส่วนที่ลื่นของลู่วิ่ง เพื่อให้มั่นใจถึงประสิทธิภาพการรับส่งข้อมูลที่ดีที่สุด การเลือกโหมดใดโหมดหนึ่งจากสามโหมดที่แสดงบนคอนโซลกลาง "2WD", "4WD" หรือ "Lock" ก็เพียงพอแล้ว
| โหมดการขับขี่ | คำอธิบาย | ข้อดี |
| 2WD | ส่งแรงบิดไปที่ล้อหน้า | ประหยัดน้ำมันมากขึ้น เสียงรบกวนของรถลดลง การควบคุมที่ดีขึ้น สิ่งนี้ยังรักษาความเป็นไปได้ที่ชุดควบคุมจะส่งแรงบิดไปยังเพลาล้อหลังเพื่อลดเสียงรบกวน |
| 4WD อัตโนมัติ | มันกำหนดทิศทางของแรงบิดไปที่ล้อหลังขึ้นอยู่กับตำแหน่งของคันเร่งและความแตกต่างของความเร็วของล้อหน้าและล้อหลัง | การกระจายแรงบิดที่เหมาะสมที่สุดสำหรับสภาวะการขับขี่ที่กำหนด การกระจายแรงบิดระหว่างเพลาหน้าและเพลาหลังจะดำเนินการโดยอัตโนมัติโดยหน่วยอิเล็กทรอนิกส์ ขึ้นอยู่กับพารามิเตอร์ในการขับขี่ของรถ (ความเร็วล้อหน้าและล้อหลัง ตำแหน่งแป้นคันเร่ง และความเร็วของรถ) แนะนำให้ใช้โหมดขับเคลื่อน 2 ล้อ |
| 4WD ล็อค | ส่งแรงบิดไปที่ล้อหลังมากกว่าโหมด 4WD ถึง 1.5 เท่า | เพิ่มการยึดเกาะ ให้การทรงตัวที่ความเร็วสูงและ ข้ามดีกว่าบนพื้นผิวที่ไม่เรียบหรือลื่น โหมด LOCK คล้ายกับโหมด 4WD แต่มีการปรับเปลี่ยนกฎการกระจายแรงบิดระหว่างเพลา ที่ความเร็วต่ำ แรงบิดเพิ่มขึ้น 1.5 เท่าไปยังเพลาล้อหลัง และที่ความเร็วสูง แรงบิดจะถูกกระจายอย่างเท่าเทียมกันระหว่างเพลา |
โหมดขับเคลื่อนสองโหมด
4WD อัตโนมัติ
เมื่อเลือก "4WD Auto" ระบบ 4WD รถต่างประเทศ 4WD กระจายแรงบิดบางส่วนไปยังล้อหลังอย่างต่อเนื่อง เพิ่มอัตราส่วนนี้โดยอัตโนมัติเมื่อคุณเหยียบคันเร่ง คลัตช์ส่งแรงฉุดลากไปยังล้อหลังถึง 40% เมื่อเค้นเต็มที่ และลดสิ่งนี้ได้มากถึง 25% ที่ความเร็วมากกว่า 40 ไมล์ต่อชั่วโมง ในการเคลื่อนที่อย่างมั่นคงที่ความเร็วการล่องเรือ แรงบิดสูงสุด 15% ที่มีอยู่จะถูกส่งไปยังล้อหลัง ที่ความเร็วต่ำในโค้งแคบ แรงจะลดลง ทำให้เข้าโค้งได้อย่างราบรื่น
4WD ล็อค
สำหรับการขับขี่ในสภาวะที่ยากลำบากโดยเฉพาะ เช่น หิมะ ผู้ขับขี่สามารถเลือกโหมด "4WD Lock" ได้ เมื่อล็อกเปิดอยู่ ระบบจะยังกระจายแรงบิดระหว่างล้อหน้าและล้อหลังโดยอัตโนมัติ แต่แรงบิดส่วนใหญ่จะถูกส่งต่อไปยังล้อหลัง ตัวอย่างเช่น เมื่อเร่งความเร็วบนเนินเขา คลัตช์จะส่งแรงบิดส่วนใหญ่ไปยังล้อหลังทันทีเพื่อให้การยึดเกาะทั้งสี่ล้อ ในทางกลับกัน ระบบขับเคลื่อนสี่ล้ออัตโนมัติ "ตามต้องการ" จะ "รอ" ก่อนเพื่อให้ล้อหน้าลื่นไถล จากนั้นจึงส่งแรงบิดไปยังล้อหลังเท่านั้น ซึ่งอาจรบกวนการเร่งความเร็วได้
บนถนนแห้ง โหมด 4WD Lock จะเร่งความเร็วได้อย่างมีประสิทธิภาพ แรงบิดที่มากขึ้นถูกส่งไปยังล้อหลังเพื่อกำลังที่มากขึ้น การควบคุมที่ดีขึ้นเมื่อเร่งความเร็วบนถนนที่มีหิมะตกหรือถนนที่หลวม และปรับปรุงเสถียรภาพในความเร็วสูง สัดส่วนของแรงบิดล้อหลังเพิ่มขึ้น 50% เมื่อเทียบกับโหมดขับเคลื่อน 4 ล้อ ซึ่งหมายความว่าแรงบิดสูงสุด 60% ที่มีจะส่งไปยังล้อหลังเมื่อเหยียบคันเร่งจนสุดบนถนนแห้ง ในโหมดล็อค 4WD ในมุมแคบ แรงบิดของล้อหลังจะไม่ลดลงเท่ากับเมื่อขับในโหมด 4WD Auto
อัตราส่วนของแรงบิดต่อล้อหน้า / หลังในโหมด 4WD มีค่าดังต่อไปนี้:
| โหมดการขับขี่ | ถนนแห้ง | ถนนที่ปกคลุมไปด้วยหิมะ | ||
| ล้อ | ด้านหน้า | หลัง | ด้านหน้า | หลัง |
| อัตราเร่ง | 69% | 31% | 50% | 50% |
| ที่ 30 กม./ชม | ที่ 30 กม./ชม | ที่ 15 กม./ชม | ที่ 15 กม./ชม | |
| 85% | 15% | 64% | 36% | |
| ที่ 80 กม./ชม | ที่ 80 กม./ชม | ที่ 40 กม./ชม | ที่ 40 กม./ชม | |
| ความเร็วคงที่ | 84% | 16% | 74% | 26% |
| ที่ 80 กม./ชม | ที่ 80 กม./ชม | ที่ 40 กม./ชม | ที่ 40 กม./ชม | |
แบบแผนโครงสร้าง

ส่วนประกอบและฟังก์ชันของระบบ
|
ชื่อส่วนประกอบ |
การทำงาน |
|
|
|
ส่งสัญญาณต่อไปนี้ไปยัง 4WD-ECU ที่ต้องการผ่าน CAN
|
|
|
สวิตช์โหมดขับเคลื่อน 2WD/4WD/LOCK |
ส่งสัญญาณตำแหน่งสวิตช์โหมดขับเคลื่อนสำหรับ 4WD-ECU |
|
|
|
ระบบจะประเมินสภาพถนนและโดยอิงจากสัญญาณจาก ECU แต่ละตัว สวิตช์โหมดขับเคลื่อนจะกำหนดแรงบิดตามปริมาณที่ต้องการไปยังล้อหลัง การคำนวณค่าแรงจำกัดส่วนต่างที่เหมาะสมที่สุดโดยพิจารณาจากสภาพของรถและโหมดการขับปัจจุบันโดยพิจารณาจากสัญญาณจาก ECU แต่ละตัว สวิตช์โหมดขับเคลื่อน จะควบคุมค่าปัจจุบันที่ส่งไปยังลิงก์ควบคุมอิเล็กทรอนิกส์ |
|
|
การจัดการประสิทธิภาพ (ตัวบ่งชี้การทำงาน 4WD และตัวบ่งชี้การล็อค) ในแผงหน้าปัด |
|
|
ควบคุมฟังก์ชันการวินิจฉัยตนเองและฟังก์ชันเฟลโอเวอร์ |
|
|
การควบคุมฟังก์ชันการวินิจฉัย (เข้ากันได้กับ MUT-III) |
|
|
ระบบควบคุมคลัตช์ไฟฟ้า |
4WD-ECU ส่งแรงบิดที่สอดคล้องกับค่าปัจจุบันไปยังล้อหลัง |
|
ตัวแสดงโหมดขับเคลื่อน
|
ที่ฝังอยู่ในแผงหน้าปัดระบุถึงโหมดสวิตช์โหมดการขับขี่ที่เลือก (ไม่แสดงในโหมด 2WD)
|
|
ขั้วต่อการวินิจฉัย |
แสดงรหัสการวินิจฉัยและสร้างการสื่อสารกับ MUT-III |
การกำหนดค่าระบบ

รูปแบบการควบคุม

แผนภาพการเดินสายควบคุมอิเล็กทรอนิกส์4 WD

ออกแบบ


ระบบควบคุมคลัตช์อิเล็กทรอนิกส์ประกอบด้วยตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) คลัตช์หลัก (คลัตช์หลัก) กลไกลูกเบี้ยวหลัก (ลูกเบี้ยวหลัก) ลูกบอล (บอล) กลไกลูกเบี้ยวควบคุม (ลูกเบี้ยวนักบิน) กระดอง (กระดอง) คลัตช์ควบคุม (นักบิน) คลัตช์ ) ตัวเรือนด้านหลัง (ตัวเรือนด้านหลัง) คอยล์แม่เหล็ก (คอยล์แม่เหล็ก) และเพลา (เพลา)
- ตัวเรือนด้านหน้าเชื่อมต่อกับแกนคาร์ดานและหมุนด้วยเพลา
- ที่ด้านหน้าของตัวเรือน คลัตช์หลัก (คลัตช์หลัก) และคลัตช์ควบคุม (คลัตช์นักบิน) ถูกติดตั้งบนเพลา (เพลา) (คลัตช์ควบคุม (คลัตช์นักบิน) ติดตั้งผ่านตัวหยุดลูกเบี้ยว (ลูกเบี้ยวนำร่อง))
- เพลาถูกตาข่ายผ่านฟันด้วยเฟืองขับของเฟืองท้าย
การทำงาน
ปลดคลัตช์ (2WD: Magnetic coil de-energized)

แรงขับเคลื่อนจากเคสถ่ายโอนผ่านเพลาใบพัดจะถูกส่งไปยังตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) เนื่องจากขดลวดแม่เหล็ก (ขดลวดแม่เหล็ก) ถูกปลดพลังงาน คลัตช์ควบคุม (คลัตช์นักบิน) และคลัตช์หลัก (คลัตช์หลัก) จะไม่ทำงานและแรงขับเคลื่อนจะไม่ถูกส่งไปยังเพลา (เพลา) และตัวขับเกียร์ (ตัวขับ) เฟืองท้าย) ของเฟืองท้าย
การทำงานของคลัตช์ (4WD: ขดลวดแม่เหล็กแบบมีกำลัง)

แรงขับเคลื่อนจากเคสถ่ายโอนผ่านเพลาใบพัดจะถูกส่งไปยังตัวเรือนด้านหน้า (ตัวเรือนด้านหน้า) เมื่อขดลวดแม่เหล็กได้รับพลังงาน สนามแม่เหล็กจะถูกสร้างขึ้นระหว่างตัวเรือนด้านหลัง ซึ่งควบคุมโดยคลัตช์นักบินและอาร์เมเจอร์ สนามแม่เหล็กทำหน้าที่ควบคุมคลัตช์ (คลัตช์นักบิน) และอาร์เมเจอร์ (อาร์มาเจอร์) รวมถึงคลัตช์ (คลัตช์นักบิน) เมื่อคลัตช์ควบคุม (คลัตช์นักบิน) ทำงาน แรงขับเคลื่อนจะถูกส่งไปยังกลไกลูกเบี้ยวควบคุม (pilot cam) เพื่อตอบสนองต่อแรงนี้ ลูกบอล (ลูกบอล) ในกลไกลูกเบี้ยว (ลูกเบี้ยวหลัก) (ลูกเบี้ยวนำร่อง) จะถูกหดกลับและสร้างแรงกระตุ้นในการแปล แรงกระตุ้นนี้กระทำกับคลัตช์หลัก (คลัตช์หลัก) และแรงบิดจะถูกส่งไปยังล้อหลังผ่านเพลาและเฟืองขับเฟืองท้าย
โดยการปรับกระแสที่จ่ายให้กับขดลวดแม่เหล็ก ปริมาณแรงขับเคลื่อนที่ส่งไปยังล้อหลังสามารถปรับได้ตั้งแต่ 0 ถึง 100%
บางทีทุกครั้งที่เราเห็นคำว่า "ใหม่" "ปฏิวัติ" "ไม่มีใครเทียบ" เราต้องการที่จะอุทานบางอย่างที่มีไหวพริบ บางอย่างเกี่ยวกับจักรยานและเกี่ยวกับนักประดิษฐ์ เกี่ยวกับสุนัขและจำนวนแขนขา หรือบางอย่างที่เหน็บแนมไม่น้อย อย่างไรก็ตาม สามัญสำนึกบอกเราว่าสิ่งต่างๆ ไม่ใช่เรื่องง่าย รถยนต์ไม่ได้ติดตั้งระบบป้องกันภาพสั่นไหวแบบอิเล็กทรอนิกส์เสมอไป เมื่อระบบ ABS ซึ่งตอนนี้คุ้นเคยได้ถูกนำมาใช้ในรถยนต์เป็นครั้งแรก แล้ววันนี้ล่ะ? การไม่มี ABS มักจะทำให้งง และ ESP ได้กลายเป็นอุปกรณ์บังคับสำหรับการติดตั้งทุกอย่างแล้ว รถยนต์นั่งส่วนบุคคลในแคนาดา สหรัฐอเมริกา และล่าสุดในยุโรป มีอะไรใหม่เสนอวิศวกร MMC ให้เราบ้าง ลองคิดดูสิ
พูดอย่างเคร่งครัดคำย่อ S-AWC นั้นคุ้นเคยกับเราแล้ว ระบบนี้ถูกใช้ครั้งแรกใน Mitsubishi Lancer Evo X ในตำนาน อย่างไรก็ตาม ตัวแทนของ Mitsubishi ยืนยันว่าถึงแม้ "ตัวอักษรจะเหมือนกัน" บน ใหม่ Outlanderทุกอย่างถูกจัดเรียงแตกต่างกันเล็กน้อย โดยทั่วไป S-AWC นั้นไม่ใช่วิธีแก้ปัญหาที่เฉพาะเจาะจงมากนัก ชุดของหน่วยตามแนวคิดเชิงอุดมคติซึ่งหากเราเพิกเฉยต่อสิ่งเล็กน้อยคือการให้รถมีพวงมาลัยที่เป็นกลางในสภาวะเหล่านั้นเมื่อ โอเวอร์สเตียร์หรือโอเวอร์สเตียร์ พร้อมให้การยึดเกาะที่ดีของล้อขับเคลื่อนกับถนน
สิ่งนี้บรรลุผลได้อย่างไร? ที่ Evolution ระบบประกอบด้วยหน่วยต่อไปนี้:
Active Center Differential (ACD) ซึ่งเป็นระบบไฮดรอลิกที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ คลัตช์หลายแผ่นงานหลักคือการกระจายแรงบิดระหว่างเพลา บวกกับ "การล็อคที่นุ่มนวลและราบรื่น" ของเฟืองท้ายตรงกลาง เพื่อเพิ่มประสิทธิภาพการถ่ายโอนแรงบิดไปยังเพลาหน้า/หลัง และให้โหมดการยึดเกาะที่สมดุลในขณะที่ยังคงควบคุมได้
Active Yaw Control (AYC) ควบคุมการกระจายแรงบิดระหว่างล้อหลังเพื่อให้มีเสถียรภาพเมื่อขับเข้าโค้ง และยังสามารถล็อกเฟืองท้ายบางส่วนเพื่อส่งแรงบิดไปยังล้อที่ "จับถนัดมือ" มากขึ้น
ระบบควบคุมเสถียรภาพการทรงตัว (ASC) ให้ ด้ามจับที่ดีที่สุดล้อรถ "หายใจไม่ออก" มอเตอร์หากจำเป็นและปรับแรงเบรกในแต่ละล้อ ควรสังเกตว่าความผิดปกติของระบบนี้คือ MMC เป็นครั้งแรกที่นำเซ็นเซอร์แรงเข้าไปในระบบเบรก (นอกเหนือจากเซ็นเซอร์มาตรฐานสำหรับระบบดังกล่าว - มาตรความเร่งและเซ็นเซอร์ตำแหน่งหางเสือ) ซึ่งทำให้ระบบมีมากขึ้น ข้อมูลที่ถูกต้องและดังนั้นจึงมีการตอบสนองที่เพียงพอมากขึ้น .
และในที่สุดก็, ระบบควบคุมการฉุดลาก(ABS) พร้อมการตั้งค่าแบบสปอร์ต ระบบจะรับความเร็วของการหมุนของแต่ละล้อบวกกับมุมของล้อหน้า และใช้ระบบเบรกเพื่อปลดหรือในทางกลับกัน เบรกแต่ละล้อแต่ละล้อ
แล้ว Outlander ล่ะ? ใช่ ไม่ใช่เรื่องบังเอิญที่เราได้พิจารณาส่วนประกอบของระบบ S-AWC ของ Lancer Evo X อย่างละเอียดก่อนที่จะเปลี่ยนไปใช้รถครอสโอเวอร์รุ่นใหม่ ที่นี่วิศวกรของ บริษัท ไม่ได้ตีความระบบใน "แลนเซอร์" และบนรถของเราแตกต่างกันมากในการออกแบบอย่างที่เราจะเห็น ดังนั้นหน่วยใดที่อยู่ในระบบขับเคลื่อนสี่ล้อใหม่ใน Outlander?

ดิฟเฟอเรนเชียลด้านหน้าแบบแอ็คทีฟ (AFD) ควบคุมการกระจายแรงบิดระหว่างล้อของเพลาหน้า
พวงมาลัยเพาเวอร์ไฟฟ้า (EPS) ไม่ใช่เรื่องบังเอิญที่ถูกกำหนดให้กับระบบขับเคลื่อนสี่ล้อ S-AWC หน้าที่ของมันคือการปรับชดเชยแรงปฏิกิริยาบนพวงมาลัยที่เกิดขึ้นเมื่อมีการกระจายโมเมนต์บนล้อหน้า ให้การบังคับเลี้ยวที่สะดวกสบายในสภาวะ งานประจำ AFD
คลัตช์แม่เหล็กไฟฟ้า. เชื่อมต่อเพลาล้อหลัง ควบคุมแรงบิดที่ส่งไปยังเพลาล้อหลัง
ชุดควบคุม S-AWC ต่างจากระบบทั่วไป คือใช้ชุดเซ็นเซอร์ความเร่งที่ขยายออกเพื่อกำหนดทิศทางการเดินทางของรถ เช่นเดียวกับความเร็วเชิงมุมและโหลดด้านข้าง
อะไรคือความแตกต่าง? โดยส่วนตัวแล้ว สองคนสบตาฉัน และค่อนข้างจริงจัง สำหรับเพลาหน้า แทนที่จะเป็นเฟืองท้ายแบบลิมิเต็ดสลิป ตอนนี้เรามีเฟืองท้ายแบบควบคุมด้วยความเป็นไปได้ของการล็อกบางส่วนและความสามารถในการกระจายแรงบิดระหว่างล้อ แน่นอนว่าการรวมระบบดังกล่าวในขณะเดินทางอาจไม่ส่งผลต่อการขับขี่อย่างดีที่สุด เราจะรู้สึกถึงการทำงานทั้งหมดบนพวงมาลัยในรูปแบบของแรงปฏิกิริยาในทางปฏิบัติ - กระตุกและไม่ใช่ในเวลาที่สะดวกที่สุดเนื่องจากเป็นที่ชัดเจนว่าระบบจะทำงานเมื่อสภาพการขับขี่นั้นเบาบางไม่เอื้ออำนวย .
แต่ระบบย่อยอื่นเข้ามามีบทบาทคือพวงมาลัยเพาเวอร์ไฟฟ้า โดยจะปรับอัตราขยายได้ทันที โดยชดเชยการเปลี่ยนแปลงของแรงปฏิกิริยาบนพวงมาลัยเมื่อคลัตช์ส่วนหน้าแบบแอ็คทีฟทำงานอยู่ และทั้งหมดนี้แทบจะมองไม่เห็นสำหรับคนขับและไม่สูญเสียการควบคุม
ดังนั้นเราจึงมีชุดเครื่องมือเพียงพอที่จะส่งผลต่อพฤติกรรมของรถ และทุกอย่างอยู่ในมือของวิศวกรผู้ตั้งโปรแกรมและกำหนดค่าระบบควบคุมสำหรับเครื่องมือเหล่านี้ทั้งหมดสำหรับเรา พวกเขาให้อะไรเราบ้าง?
และมอบโหมดการทำงานของระบบให้คนขับสี่โหมด
บรรพบุรุษของคลาสใหม่ที่เรียกว่า crossovers เป็นวิศวกรโซเวียตที่แปลกพอซึ่งในปี 1973 ได้ออกแบบรถยนต์นั่งออฟโรดที่เต็มเปี่ยมด้วย VAZ-2121 Niva ตัวถังรับน้ำหนักตามหน่วย Zhiguli คลาสสิก งานดังกล่าวถูกกำหนดโดยประธานคณะรัฐมนตรีของสหภาพโซเวียต Alexei Kosygin เป็นการส่วนตัวในฤดูร้อนปี 1970 เมื่อ VAZ ไม่ถึงขีดความสามารถในการออกแบบ!
การมองการณ์ไกลของทางการกลายเป็นที่ชัดเจนว่าในอีกสองทศวรรษข้างหน้าไม่มีใครในโลกนำเสนอคู่แข่งที่เพียงพอและสหภาพโซเวียตการพัฒนานี้ซึ่งเข้าสู่สายการผลิตในปี 2520 นำรายได้เงินตราต่างประเทศจำนวนมากและ ชื่อเสียงระดับโลก และเฉพาะในปี 1994 โตโยต้าญี่ปุ่นนำ RAV4 ออกสู่ตลาด เมื่อตรวจสอบอย่างละเอียดถี่ถ้วนแล้ว ปรากฏว่าไม่มีอะไรใหม่เข้ามาในแนวคิดนี้ แต่ชาวญี่ปุ่นทำสำเร็จในระดับที่สูงขึ้น ระดับเทคนิค. ตั้งแต่นั้นมาทั้งสองสัญญาณ "ทั่วไป" หลัก - ความสะดวกสบาย รถโดยสารและปรับปรุงตัวเลือก ความชัดเจนทางเรขาคณิต- ยังคงไม่เปลี่ยนแปลง แต่ด้วยการใช้ระบบขับเคลื่อนสี่ล้อ สถานการณ์จึงซับซ้อนกว่ามาก
จากพระนิพพานจนถึงปัจจุบัน
พิจารณาประเด็นหลักของวิวัฒนาการของระบบขับเคลื่อนสี่ล้อในรถยนต์ "ในเมือง"
Niva และ RAV4 สองรุ่นแรก (จนถึงปี 2548) มีระบบขับเคลื่อนสี่ล้อแบบกลไกถาวรพร้อมเฟืองกลางและเฟืองท้ายฟรี และไม่มีอุปกรณ์อิเล็กทรอนิกส์ควบคุม แม้จะมีความสามารถข้ามประเทศที่ดี แต่โครงการดังกล่าวไม่เหมาะกับรถยนต์นั่งส่วนบุคคลมากนัก - หน่วยส่งกำลังที่ซับซ้อนจำนวนมากและการสูญเสียทางกลในพวกเขาทำให้การดำเนินการมีค่าใช้จ่ายค่อนข้างสูงโดยเฉพาะอย่างยิ่งกับฉากหลังของราคาน้ำมันที่เพิ่มสูงขึ้นเรื่อย ๆ ใช่และรูปแบบดังกล่าวช่วยเพียงเล็กน้อยจากการแขวนในแนวทแยง ความพยายามครั้งแรกในการลดจุดอ่อนโดยไม่ประนีประนอมยอมความโดยฮอนด้ากับ CR-V ซึ่งเปิดตัวช้ากว่า RAV4 และสามารถคำนึงถึงความผิดพลาดของคู่แข่ง
การพัฒนาอย่างรวดเร็ว อิเล็กทรอนิกส์ยานยนต์และเทคโนโลยีทำให้สามารถแก้ปัญหาการควบคุมเพลาที่เชื่อมต่อได้ในระดับใหม่: แทนที่จะเป็นคลัตช์หนืดแบบดั้งเดิมที่ทำงานบนหลักการเปิด / ปิด Toyota ในปี 2548 ได้ติดตั้งคลัตช์หลายแผ่น "เปียก" ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ในส่วนที่สาม รุ่น RAV4 โปรเซสเซอร์ 32 บิตอันทรงพลังในระบบนี้เปลี่ยนแรงบิดที่ส่งไปยังล้อหลังอย่างราบรื่นในช่วงกว้างตั้งแต่ 5% ไปจนถึงการบล็อกอย่างสมบูรณ์ในแบบเรียลไทม์ซึ่งควบคู่ไปกับ ระบบ ABSระบบควบคุมเสถียรภาพการทรงตัวและการควบคุมการยึดเกาะถนนทำให้พฤติกรรมของรถคาดเดาได้มากแม้กับผู้ขับขี่ที่ไม่มีประสบการณ์ในขณะที่ยังคงรักษาระดับ off-road ไว้สูง (ตามมาตรฐาน รถยนต์ด้วยระยะห่างจากพื้นดินที่เพิ่มขึ้น) ที่มีคุณภาพ
จริงอยู่มีแมลงวันตัวเล็ก ๆ ในครีมที่นี่: ที่โหลดสูงในโหมดการบล็อกแบบเต็มโหนดค่อนข้างร้อนมากเกินไปอันเป็นผลมาจากการป้องกันซอฟต์แวร์ถูกกระตุ้นและรถกลายเป็นระบบขับเคลื่อนล้อหน้าชั่วคราว ความเร็วของช่วงเวลาที่ไม่พึงประสงค์นี้ส่วนใหญ่ขึ้นอยู่กับพื้นที่ทำความเย็นและปริมาตรของน้ำมันที่เติม แต่ไม่สามารถยกเลิกได้อย่างสมบูรณ์ - นี่เป็นข้อบกพร่องโดยธรรมชาติในเกียร์เสียดสีใด ๆ ดังนั้นคุณไม่ควรเร่งครอสโอเวอร์อย่างเมามันในโคลนลึกหรือ หิมะสำหรับ SUV ที่เต็มเปี่ยม แบบแผนดังกล่าวที่มีการเปลี่ยนแปลงน้อยที่สุดได้กลายเป็นมาตรฐานโดยพฤตินัยในกลุ่มนี้ และ "การพุ่งพรวด" ได้ตกลงไปอยู่ด้านล่างสุดของเรตติ้งการขายหรือออกจากตลาดโดยสิ้นเชิง เช่น ซูซูกิ แกรนด์วิทารา.
เลือดน้อย
เป็นไปได้ไหมที่จะปรับปรุงความสามารถของการส่งสัญญาณดังกล่าวโดยไม่ทำให้ยุ่งยากเหมือนในตำนาน เมอร์เซเดส-เบนซ์ จี-คลาสหรือปฏิเสธที่จะติดตั้งบนล้อแต่ละล้อด้วยมอเตอร์ไฟฟ้าของตัวเอง? ค่อนข้าง! คำตอบของคำถามอยู่ที่การใช้เฟืองท้ายแบบไขว้ แต่ตอนนี้มีระดับการบล็อกที่ควบคุมตามเวลาจริงแล้ว หลักการของการใช้ระบบส่งสัญญาณดังกล่าวไม่ใช่เรื่องใหม่อีกต่อไป ผู้บริโภคสามารถทดลองใช้กับรถซีดานธุรกิจ Honda Legend และ Mitsubishi Lancer Evolution อย่างไรก็ตาม โซลูชั่นที่ใช้ในพวกเขา แม้ว่าจะแตกต่างกัน ระดับสูงความสง่างามทางเทคนิค มีประโยชน์น้อยสำหรับ ผู้บริโภคจำนวนมากเพราะความซับซ้อนและ ค่าใช้จ่ายสูงและมักไม่ค่อยมีทรัพยากร
แต่แม้กระทั่งที่นี่ คลัตช์หลายแผ่นที่ควบคุมด้วยไฟฟ้า "เปียก" ที่รู้จักกันดีก็มาช่วยไว้ได้ ด้วยการใช้ประโยชน์จากประสบการณ์ที่สั่งสมมา Mitsubishi ได้เพิ่มการบิดใหม่ให้กับ Outlander Sport ที่ได้รับการปรับปรุง - เฟืองท้ายแบบแอคทีฟด้านหน้า (AFD) พร้อมการกระจายแรงบิดที่ปรับได้ระหว่างล้อของเพลาหน้า พูดในภาษาทางเทคนิคแบบแห้ง มีการเพิ่มเครื่องมืออื่นสำหรับการควบคุมแบบแอ็คทีฟและการควบคุมเวกเตอร์แรงขับ โดยผสานกับระบบพวงมาลัยพาวเวอร์ (EPS) ระบบที่ใช้งาน ABS, ESP และระบบควบคุมการขับเคลื่อนเพลาล้อหลังที่เอาท์พุต เราได้รับระบบเจเนอเรชันใหม่ที่เรียกว่า S-AWC (Super All Wheel Control) แบบบินสูงเล็กน้อย
แตกต่างจากระบบขับเคลื่อนสี่ล้อทั่วไป S-AWC ประเมิน ความเร็วเชิงมุมรถและช่วยให้คุณรักษารถให้อยู่ในเส้นทางที่คนขับเลือกได้แม่นยำยิ่งขึ้น สิ่งนี้เปรียบเทียบทิศทางการเดินทางจริงของรถ (ตามข้อมูลจากเซ็นเซอร์ความเร่งตามยาวและด้านข้าง) กับทิศทางที่วางแผนไว้โดยคนขับ (ตามเซ็นเซอร์มุมบังคับเลี้ยว) และแก้ไขสำหรับอันเดอร์สเตียร์หรือโอเวอร์สเตียร์ที่อาจเกิดขึ้นสลับกันระหว่างการซ้อมรบ .
สำหรับคนขับ ดูเหมือนว่าตัวรถเองจะช่วยในโค้ง เช่น เลี้ยวซ้ายที่คมกริบด้วยความเร็วสูง โมเมนต์จะกระจายอย่างแข็งขัน ไม่เพียงแต่ระหว่างด้านหน้ากับ เพลาหลังเช่นเคย แต่ยังอยู่ระหว่างล้อของเพลาหน้าและรถถูกดึงเข้าสู่ทางเลี้ยวที่ต้องการทั้งๆ ที่แรงต้านของแรงเหวี่ยงหนีศูนย์กลาง
ระบบนี้ให้ประโยชน์แก่ผู้ขับขี่ทั่วไปหรือไม่? ไม่ต้องสงสัย! เครื่องวัดรัศมีวงเลี้ยวที่บันทึกไว้หรือมิเตอร์เดียวกับที่รถเป่าน้อยกว่าในการทดสอบพื้นผิวคอนกรีตเปียกระหว่างทางออกจาก "งู" ใน ชีวิตจริงจะไม่บินลงคูน้ำหรือพลิกคว่ำ มาสายโดยบังเอิญกับการซ้อมรบหรือไม่คำนวณความเร็ว ตอนนี้ การรักษารถให้อยู่ในเส้นทางได้ง่ายขึ้นเมื่อมีน้ำแข็งและแอสฟัลต์ปะปนกันภายใต้หิมะบริสุทธิ์ และในสภาพทางวิบาก การบังคับล็อกเฟืองท้ายด้านหน้าที่เข้าถึงได้ด้วยการกดปุ่ม จะช่วยให้คุณกลับบ้านได้ตรงเวลาอย่างอบอุ่นและสะดวกสบาย และไม่ไปลึกถึงเข่าหลังรถแทรคเตอร์ไปยังหมู่บ้านใกล้เคียง ไม่มีเวลาปีนตลิ่งสูงหลังจากตกปลาเมื่อฝนเริ่มตก ...
ระบบนี้ไม่ควรถือเป็นยาครอบจักรวาล แต่เรายอมรับว่ามันขยายความสามารถของเครื่องจักรได้อย่างมากไม่เพียงเท่านั้น แต่ยังรวมถึง ความปลอดภัยในการใช้งานบนถนน. อันที่จริงเรามี Mitsubishi Outlander ที่ดูคล้ายกันแต่ข้างในเปลี่ยนไป Outlander ที่คุ้นเคยซึ่งตอนนี้ "ล้าสมัย" ไม่ได้แย่ในตัวเองและบ่อยครั้งที่ความสามารถของมันถูกกำหนดโดยคุณภาพของยางและระยะห่างจากพื้น แต่ระบบนี้ซึ่งพวกเขาถูกขอให้จ่ายเพิ่มอีก 20,000 rubles มีประโยชน์มาก . ควรจะสันนิษฐานว่าในอนาคตอันใกล้นี้ คู่แข่งส่วนใหญ่จะได้ระบบที่คล้ายคลึงกัน เนื่องจากในระดับเทคนิคในปัจจุบัน การแนะนำโหนดใหม่ไม่จำเป็นต้องมีการปฏิวัติทางเทคโนโลยีครั้งใหม่ สิ่งเดียวที่น่าผิดหวังคือจนถึงตอนนี้ S-AWC มีเฉพาะในรถยนต์ที่มีการกำหนดค่า Ultimate สูงสุดด้วยน้ำมันเบนซิน V6 3.0 ลิตร (1,479,000 รูเบิล) ส่วนแบ่งการขายมีขนาดเล็กมากและผู้ซื้อส่วนใหญ่ที่พร้อม จ่ายเพิ่มสำหรับระบบดังกล่าวในระดับการตัดแต่งยอดนิยมที่ง่ายกว่าด้วยเครื่องยนต์ 2.4 ลิตรพวกเขาสามารถวิ่งไปหาคู่แข่งได้หากมีเวลาทำข้อเสนอที่น่าสนใจ CR-V ตัวแรกพุ่งชน RAV4 ได้อย่างไร...




