ซูบารุ ฟอเรสเตอร์ ขับเคลื่อนสี่ล้อถาวรหรือไม่ ระบบขับเคลื่อนสี่ล้อแบบสมมาตรของ Subaru เป็นเทคโนโลยีหลักของแบรนด์ ปรับปรุงความแข็งแรงของด้ามจับ
ทดลองขับ
ซูบารุ ฟอเรสเตอร์
ไดรฟ์คือทุกสิ่ง!
Potapkin อเล็กซานเดอร์ ( 26.05.2017
)
รูปถ่าย: PushCAR
บุคคลใดในประเทศและต่างประเทศของเราที่อย่างน้อยก็คุ้นเคยกับรถยนต์เล็กน้อยเมื่อได้ยินวลี - "ขับเคลื่อนสี่ล้อสมมาตร" จะจำรถได้ทันที แบรนด์ Subaru. นี่เป็นกฎชนิดหนึ่ง - เราพูดว่า Subaru เราหมายถึงระบบขับเคลื่อนสี่ล้อแบบสมมาตร และในทางกลับกัน เราพูดว่าระบบขับเคลื่อนสี่ล้อแบบสมมาตร เราหมายถึง Subaru และแน่นอนว่ารถยนต์ซูบารุเป็นเครื่องยนต์บ็อกเซอร์ในตำนาน รถยนต์ซูบารุเป็นประเพณี ขับเคลื่อนสี่ล้อและ เครื่องยนต์บ็อกเซอร์ซึ่งผู้ผลิตยังคงเป็นจริงตลอดประวัติศาสตร์

จนถึงปัจจุบัน Subaru นำเสนอเพียงสี่รุ่นในรัสเซีย แต่รุ่นหลักของแบรนด์คือและยังคงเป็น Forester ซึ่งเป็นหัวรถจักรหลักของยอดขายทั้งหมด Forester รุ่นที่สี่ใหม่ที่มีดัชนี SJ ปรากฏในปี 2013 และได้ผ่านการปรับสไตล์เล็กๆ สองครั้งแล้ว ท้ายที่สุดการเปลี่ยนแปลงรูปลักษณ์เล็กน้อย แต่บ่อยครั้งได้รับการออกแบบมาเพื่อรักษาความสนใจในรุ่นและในแบรนด์โดยรวม

เป็นที่ทราบกันดีอยู่แล้วว่าผู้ผลิตญี่ปุ่นทุกรายต่างก็ชื่นชอบการส่งสัญญาณแบบแปรผันอย่างต่อเนื่อง กล่าวคือ ตัวแปรผัน ในหมู่พวกเขาคือซูบารุ ละทิ้งการส่งสัญญาณอัตโนมัติแบบเดิม นักพัฒนาได้ใส่ในรุ่นใหม่ การพัฒนาตนเอง- ตัวแปรเชิงเส้นทรอนิกส์ ด้านหนึ่งตัวแปรคือการขับขี่ที่ราบรื่นและประหยัดน้ำมัน ในทางกลับกัน ชิ้นส่วนของกล่องสึกหรอมากและทำให้เกิด "ความร้อนสูงเกินไป" อย่างรวดเร็วบนท้องถนน ท้ายที่สุดแล้ว ครอสโอเวอร์ใดๆ โดยเฉพาะอย่างยิ่งกับการตั้งค่าขับเคลื่อนสี่ล้อเช่น Subaru ไม่ช้าก็เร็วก็ต้องออกนอกถนน - "นวด" สิ่งสกปรกและถ่ายโอนภาระหนัก และดูเหมือนว่า CVT จะไม่เหมาะสำหรับการเดินทางดังกล่าว แต่วิศวกรของ Subaru พยายามทำลายคำกล่าวนี้ กล่อง Lineartronic สามารถรับน้ำหนักได้มาก คุณสามารถติดและลื่นไถลเป็นเวลาห้าหรือสิบนาที และท้ายที่สุด คุณจะไม่เห็นบน แผงควบคุมกล่องหรือตัวบ่งชี้ความร้อนสูงเกินไปของคลัตช์ แน่นอน หากคุณต้องการ คุณสามารถทำให้ตัวแปรร้อนมากเกินไปและจับ Forester ได้ แต่ถ้าคุณเปรียบเทียบกับคู่แข่ง Forik ก็เป็นหนึ่งในผู้นำในแง่ของความอดทน ระบบขับเคลื่อนสี่ล้อแบบสมมาตรของแบรนด์ดังเช่นเมื่อก่อนจะแตกต่างกันไปตามระบบเกียร์ จาก กล่องเครื่องกลเกียร์เป็นระบบขับเคลื่อนสี่ล้อที่ล้ำหน้ากว่าด้วยเฟืองกลางแบบล็อคตัวเอง นั่นคือรุ่นของ "กลไก" มีระบบขับเคลื่อนสี่ล้อแบบถาวร ระบบที่เรียบง่ายมาพร้อมกับ CVT ซึ่งจะกระจายแรงบิดระหว่างเพลาโดยอัตโนมัติ และมีหน้าที่ในการล็อคเฟืองท้ายตรงกลาง คลัตช์หลายแผ่น. และระบบช่วยเหลือออฟโรด X-Mode ช่วยให้ Forester ขับเคลื่อนทุกล้ออย่างถาวร หากความเร็วไม่สูงกว่า 40 กม./ชม. และช่วยรักษาความเร็วที่ตั้งไว้โดยอัตโนมัติเมื่อลงจากที่สูง

แต่ถึงแม้จะขับเคลื่อนสี่ล้อที่ง่ายกว่าและไม่มีระบบ X-Mode Forester บนท้องถนนก็สามารถแข่งขันกับรถยนต์สองสามคันในระดับนี้ คู่แข่งหลักของ Subaru Forester ในแง่ของความสามารถข้ามประเทศ ระบบขับเคลื่อนสี่ล้อ และการตั้งค่าถือเป็น Jeep Cherokee ใหม่หรือ Land Rover Discovery Sport

และถ้าด้วยองค์ประกอบทางเทคนิคของระบบส่งกำลังและระบบขับเคลื่อนสี่ล้อซึ่งเสริมระยะห่างจากพื้นถึง 22 ซม. ทุกอย่างจะดีมากและไม่มีอะไรต้องบ่นเลย และอาจกล่าวได้ว่าเป็นไพ่ตายหลักของ Forester ซึ่งผู้ผลิตมุ่งเน้น แต่สำหรับส่วนที่เหลือ ได้แก่ ความสะดวกสบาย คุณภาพของวัสดุและการประกอบ ยังคงมีคำถามและความคิดเห็น แน่นอน หากเราวาดความคล้ายคลึงกับรุ่นก่อน Forester ใหม่ก็จะดีขึ้นมาก แต่ถึงกระนั้นก็ยังมีข้อบกพร่องมากมายซึ่งไม่ควรอยู่ในรถเกินสองล้าน และสิ่งแรกที่คุณสังเกตเห็นภายในตัวรถคือความเรียบง่าย ความล้าสมัย และคุณภาพของวัสดุที่น้อย หลายคนคุ้นเคยกับข้อเท็จจริงที่ว่า Subaru ให้ความสำคัญกับการควบคุมและเทคโนโลยีเป็นหลัก แต่ความสะดวกสบายและความคล่องตัวในการเคลื่อนไหวเป็นเรื่องรอง และไม่จำเป็นอย่างยิ่งในที่นี้ บอกตามตรงว่าโดยส่วนตัวผมไม่เข้าใจเรื่องนี้ และมันค่อนข้างแปลกสำหรับผมที่จะเห็นรถราคา 2 ล้านด้วยเพนนี เช่น ไม่มี เซ็นเซอร์หลังที่จอดรถด้านหน้าฉันเงียบ ใช่มีกล้องมองหลัง แต่ตามเทรนด์สมัยใหม่ทั้งหมดจะต้องเสริมด้วยเซ็นเซอร์จอดรถ และไม่มีเซ็นเซอร์จอดรถในทุกรุ่น! หรือระบบมัลติมีเดียที่มีลำโพงหกตัวซึ่งเห็นได้ชัดว่าอยู่ที่นี่เพียงเพราะจำเป็นและไม่มีใครเกี่ยวข้องกับการตั้งค่าเลย ส่วนหัวนั้นไวต่อการสัมผัสอย่างสมบูรณ์และคุ้มค่าที่จะให้มันเนื่องจาก "หัว" นั้นทำงานเร็วมาก ฉันยังประหลาดใจกับการทำงานที่น่าขยะแขยงของเซ็นเซอร์วัดแสง บางครั้งเขาไม่เข้าใจว่าต้องเปิดไฟต่ำเมื่อใด และควรปิดเมื่อใด นอกจากนี้ แผงหน้าปัดแบบออปโตโทรนิกยังใช้งานได้ในสองขั้นตอน กล่าวคือไม่มีการเปลี่ยนแบ็คไลท์อย่างราบรื่น กล่าวคือ ไม่มีการหรี่ไฟ เพียงแค่เปลี่ยนเป็นสลัวหรือสว่าง และเป็นที่น่าสังเกตว่าตอนนี้คุณจะไม่พบข้อบกพร่องเล็กน้อยเช่นนี้แม้แต่ใน รถยนต์ราคาประหยัดสำหรับ 600,000 รูเบิล และคุณไม่ควรลืมเกี่ยวกับ "เคล็ดลับ" หลักของคนส่วนใหญ่ ผู้ผลิตชาวญี่ปุ่น- กระจกไฟฟ้าเพียงสองบานและบางครั้งมีหนึ่งบานซึ่งทำงานในโหมดอัตโนมัติ


สำหรับห้องโดยสารโดยรวม เขาชอบเสียงดังเอี๊ยดมาก โดยเฉพาะอย่างยิ่งเมื่อกระแทกและกระแทก และเขาก็ไม่พอใจกับเสียงเพลงที่ดังเช่นกัน โดยทั่วไปแล้ว คนญี่ปุ่นมีหลายอย่างที่ต้องดิ้นรนเพื่อ อย่างไรก็ตาม หากสิ่งเล็กๆ น้อยๆ เหล่านี้ เรียกว่าถูกละเลย ห้องโดยสารที่ใหญ่และกว้างขวางในชั้นเรียนก็เปิดออกต่อหน้าเรา ลำต้นใหญ่(ปริมาณสูงสุดเมื่อพับโซฟาด้านหลัง 1548 ลิตร) กว้างขวาง แถวหลังและความภักดีต่อเบาะหลังมากทำให้ Forester ใช้งานได้จริงอย่างที่หลายคนชื่นชม และสิ่งแรกที่พวกเขาพิจารณาเมื่อเลือกรถ แต่ถ้าคุณยังคงพบข้อผิดพลาดกับสิ่งเล็กน้อยสำหรับตัวฉันเอง ฉันสังเกตเห็นว่าการปรับที่นั่งคนขับไม่เพียงพอ โดยส่วนตัวแล้ว ฉันไม่ได้ปรับแนวตั้งเพียงพอ และฉันต้องการให้เก้าอี้ลดต่ำลง

ในแง่ของการจัดการ Forester เป็นตัวแทนทั่วไปของคลาสนี้ แต่มีข้อได้เปรียบเล็กน้อย - บ๊อกเซอร์มอเตอร์, ต้องขอบคุณจุดศูนย์ถ่วงที่ต่ำกว่าซึ่งทำให้ได้เปรียบในการผลัดกัน พลัสขับเคลื่อนสี่ล้อซึ่งกระจายแรงบิดระหว่างล้อและเพลาอย่างต่อเนื่องขึ้นอยู่กับพวงมาลัย รถที่เราทดสอบใช้เครื่องยนต์ 2.5 ลิตร มอเตอร์นี้เป็นค่าเฉลี่ยสีทองสำหรับ Forester เครื่องยนต์ 171 แรงม้า ให้แรงบิดสูงสุด 235 นิวตันเมตร ตามการวัดและความรู้สึก เขาเร็วกว่าลักษณะที่ประกาศไว้เล็กน้อย ความคล่องตัวและการตอบสนองดังกล่าวไม่สามารถอวดได้มากกว่านี้อีกแล้ว เครื่องยนต์ทรงพลังปริมาณเดียวกัน มอเตอร์ดึงรถอย่างมั่นใจแม้หลังจาก 140 กม. / ชม. และการเร่งความเร็วถึง 100 กม. / ชม. ใช้เวลาเพียง 9 วินาทีเท่านั้น แต่เนื่องจากกันเสียงไม่เพียงพอ ห้องเครื่องและ ซุ้มล้อฉันไม่ต้องการที่จะ "หมุน" เครื่องยนต์เลย และด้วยความเร็วสูง เสียงแอโรไดนามิกจะแทรกซึมเข้าไปในห้องโดยสารด้วยความเร็วสูง ของ minuses สามารถสังเกตคันเร่งที่ไวเกินไป สิ่งนี้จะสังเกตเห็นได้ชัดเจนเป็นพิเศษในการจราจรในเมือง แม้จะกดแก๊สเพียงเล็กน้อย แต่รถก็ตอบสนองทันทีด้วยการกระตุกไปข้างหน้า ยาครอบจักรวาลในการจราจรติดขัดจะเป็นโหมด L "ลด" เท่านั้น ซึ่งทำให้กล่องอยู่ในเกียร์แรกจำลอง

ในแง่ของระบบกันสะเทือนและการควบคุม Forester ไม่เพียงก้าวไปข้างหน้าเท่านั้น แต่ยังก้าวกระโดดครั้งใหญ่ แพลตฟอร์มร่วมซึ่งใช้รุ่นจูเนียร์ XV มีเสาแมคเฟอร์สันอยู่ด้านหน้าพร้อมเหล็กกันโคลง ความเสถียรของม้วน, หลัง - อิสระ, สปริงบนปีกนกคู่ และการระงับที่นี่ได้รับการปรับแต่งสำหรับถนนที่ไม่ดีจริงๆ คุณสามารถขับรถด้วยความเร็วได้อย่างปลอดภัยตามทางที่พัง ถนนในชนบทหรือบน “คอนกรีต” ที่เห็นได้มาก และในขณะเดียวกัน ให้ตื่นตาตื่นใจกับร่างกายที่สะสมน้อยนิด ปราศจากการพังทลาย และสนุกสนานเพลิดเพลิน งานเงียบชั้นวาง

Subaru Forester ดีขึ้นเรื่อยๆ ในทุกเจเนอเรชั่น ไพ่ตายหลักของเขาต่อหน้าเพื่อนร่วมชั้นคือและจะเป็นส่วนประกอบทางเทคนิค - เครื่องยนต์และระบบขับเคลื่อนสี่ล้อ แต่การตกแต่งภายใน (ประสิทธิภาพ การออกแบบ และคุณภาพ) ทำให้สูญเสียคู่แข่งเกือบทั้งหมดในตลาดไป สำหรับผู้ซื้อรถยนต์ส่วนใหญ่ ความสะดวกสบาย ความสะดวกสบาย ระบบที่ทันสมัยความปลอดภัยเชิงรุกและผู้ช่วยอิเล็กทรอนิกส์ต่างๆ ความสามารถแบบออฟโรดนั้นแทบไม่มีความกังวลเลยในตอนนี้ ท้ายที่สุด มีเพียงไม่กี่แห่งในเมืองที่ผ่านหุบเขาพายุ เอาชนะฟอร์ด หรือเพียงแค่ขับบนพื้นดินที่เป็นโคลน ดังนั้น การให้ความสำคัญอย่างมากกับความสามารถในการขับขี่แบบข้ามประเทศและการลงทุนอย่างมากในการพัฒนารถจึงไม่ใช่การเคลื่อนไหวที่ถูกต้อง อย่างไรก็ตาม รถยนต์แบรนด์ซูบารุจะค้นหาผู้ซื้ออยู่เสมอ และจะไม่มีวันถูกทิ้งไว้โดยไม่สนใจ

ราคาของรถ Subaru Forester (2.5 CVT) จาก 2,197,900 rubles
ซูบารุฉลองครบรอบ 40 ปี รถขับเคลื่อนสี่ล้อ
บริษัท ฟูจิ เฮฟวี่ อินดัสตรีส์ จำกัด (FHI) ผู้ผลิตรถยนต์ซูบารุ ประกาศว่าปี 2555 เป็นวันครบรอบ 40 ปีของการเปิดตัวรถยนต์ขับเคลื่อนสี่ล้อของซูบารุ ซึ่งเป็นครั้งแรกที่ Subaru Leone Estate Van 4WD เปิดตัวในญี่ปุ่นในปี 2515
จนถึงปัจจุบัน FHI ยังคงเป็นผู้บุกเบิกระบบขับเคลื่อนสี่ล้อ รถยนต์. ซูบารุผลิตรถยนต์ 4x4 *1 ทั้งหมด 11,782,812 (31 มกราคม 2555) คิดเป็นประมาณ 55.7% ของยอดขายทั้งหมดของแบรนด์
ระบบขับเคลื่อนสี่ล้อของซูบารุช่วยกระจายแรงฉุดลากไปยังล้อทั้งสี่อย่างมีประสิทธิภาพ ด้วยการผสมผสานของระบบขับเคลื่อนสี่ล้อแบบสมมาตร (SAWD) และเครื่องยนต์ Subaru Boxer ที่วางขวางในแนวนอน หน่วยพลังงานตั้งอยู่อย่างสมมาตรสัมพันธ์กับแกนตามยาวของรถ และเกียร์จะเลื่อนกลับภายในระยะฐานล้อ การจัดเรียงนี้ปรับความสมดุลมวลตามยาวตามขวางให้เหมาะสมและให้การยึดเกาะที่มั่นคงบนพื้นผิวใดๆ ใน เงื่อนไขต่างๆความเคลื่อนไหว. นอกจากนี้ยังมีความเสถียรในความเร็วสูงที่ยอดเยี่ยมและการบังคับเลี้ยวและการควบคุมที่ดีเยี่ยม ทำให้ SAWD เป็นเทคโนโลยีหลักที่อยู่เบื้องหลังปรัชญาด้านความปลอดภัยของ Subaru ผสมผสานกับความเพลิดเพลินในการขับขี่
จากการวิจัยอย่างต่อเนื่อง การปรับระบบขับเคลื่อนสี่ล้อของ Subaru ให้เข้ากับลักษณะเฉพาะของแต่ละรุ่น FHI ได้พัฒนาเทคโนโลยีในด้านนี้อย่างสมบูรณ์แบบ ตั้งแต่เทคโนโลยีที่สามารถให้การควบคุมบนถนนที่ขรุขระ ไปจนถึงเทคโนโลยีที่เป็นเอกลักษณ์เฉพาะที่รับประกันความเสถียรสูงท่ามกลางสายฝน หิมะ หรือสภาพการขับขี่ . ความเร็วสูง. การพัฒนาล่าสุดรวมถึงการจัดการ ความพยายามบนล้อทั้งสี่ซึ่งสร้างการยึดเกาะถนนทั้งสี่ที่เชื่อถือได้อย่างต่อเนื่อง
ข้อมูลเพิ่มเติม
ระบบขับเคลื่อนสี่ล้อสมมาตรของ Subaru
- ระบบขับเคลื่อนสี่ล้อ VTD*2: เวอร์ชั่นสปอร์ตพร้อมระบบขับเคลื่อนสี่ล้อ ระบบควบคุมอิเล็กทรอนิกส์ซึ่งช่วยปรับปรุงลักษณะการเลี้ยว ระบบขับเคลื่อนสี่ล้อขนาดกะทัดรัดประกอบด้วยเฟืองท้ายดาวเคราะห์และจานหลายแผ่น คลัตช์ไฮดรอลิกอินเตอร์ล็อค *3 ควบคุมด้วยระบบอิเล็กทรอนิกส์ การกระจายแรงบิดระหว่างด้านหน้าและ ล้อหลังในอัตราส่วน 45:55 ได้รับการแก้ไขอย่างต่อเนื่องโดยล็อกเฟืองท้ายโดยใช้คลัตช์หลายแผ่น การกระจายแรงบิดจะถูกควบคุมโดยอัตโนมัติในอัตราส่วน 50:50 ระหว่างล้อหน้าและล้อหลัง ขึ้นอยู่กับเงื่อนไข ผิวทาง. สิ่งนี้ให้ความเสถียรที่ยอดเยี่ยม และโดยการกระจายแรงบิดโดยเน้นที่ล้อหลัง คุณลักษณะการบังคับเลี้ยวจึงได้รับการปรับปรุง ซึ่งทำให้มั่นใจได้ถึงความดุดัน ขับรถสปอร์ต.
รุ่นปัจจุบัน (ข้อกำหนดของรัสเซีย)]
ในตลาดรัสเซีย ซูบารุ เลกาซี่ GT, Forester S-Edition, Outback 3.6, Tribeca, WRX STI พร้อม เกียร์อัตโนมัติ - ระบบขับเคลื่อนสี่ล้อพร้อมการกระจายแรงบิดแบบแอคทีฟ (ACT): ระบบขับเคลื่อนสี่ล้อควบคุมด้วยระบบอิเล็กทรอนิกส์ที่ช่วยปรับปรุงความประหยัดและเสถียรภาพ ตัวแปลงแรงบิดแบบหลายแผ่นที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ดั้งเดิมของ Subaru จะปรับการกระจายแรงบิดด้านหน้าไปด้านหลังตามเวลาจริงตามสภาพการขับขี่ ในโหมดปกติ ระบบจะกระจายแรงบิดระหว่างล้อหน้าและล้อหลังในอัตราส่วน 60:40 ให้ประโยชน์สูงสุดจากระบบขับเคลื่อนสี่ล้อ ให้การควบคุมที่มั่นคงและปลอดภัยในทุกกรณี สภาพการจราจรโดยไม่คำนึงถึงระดับความสามารถของคนขับ
ในตลาดรัสเซีย Subaru Legacy/Outback 2.5 พร้อมเกียร์ Lineartronic Forester (พร้อมเกียร์อัตโนมัติ) Impreza และ XV พร้อมเกียร์ Lineartronic - ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายล็อคตัวเองตรงกลางพร้อมคัปปลิ้งหนืด (CDG): ระบบขับเคลื่อนสี่ล้อแบบกลไกสำหรับเกียร์แบบกลไก ระบบนี้เป็นการผสมผสานระหว่างเฟืองท้ายตรงกลางกับเฟืองดอกจอกและตัวล็อคแบบคัปปลิ้งที่มีความหนืด ภายใต้สภาวะปกติ แรงบิดระหว่างล้อหน้าและล้อหลังจะกระจายในอัตราส่วน 50:50 ระบบนี้รับประกันความปลอดภัยในการขับขี่แบบสปอร์ตโดยใช้ประโยชน์จากการยึดเกาะถนนให้ได้มากที่สุด
[รุ่นปัจจุบัน (สเปคของรัสเซีย)]
Subaru Legacy, Forester, Impreza และ XV พร้อมเกียร์ธรรมดา - ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายแบบมัลติโหมด (DCCD *4):ระบบขับเคลื่อนสี่ล้อที่เน้นให้สูงสุด ลักษณะการวิ่ง, สำหรับการเล่นกีฬาอย่างจริงจัง ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายแบบลิมิเต็ดสลิปเซ็นเตอร์ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ใช้ล็อกเฟืองท้ายแบบกลไกและแบบอิเล็กทรอนิกส์เมื่อเปลี่ยนแรงบิด แรงบิดกระจายระหว่างล้อหน้าและล้อหลังในอัตราส่วน 41:59 โดยเน้นที่ประสิทธิภาพการขับขี่สูงสุดและการควบคุมเสถียรภาพแบบไดนามิกของรถอย่างเหมาะสม ระบบเชื่อมต่อแบบกลไกมีการตอบสนองที่เร็วกว่าและทำงานก่อนระบบอิเล็กทรอนิกส์ การทำงานกับแรงบิดสูง ระบบแสดงให้เห็นถึงความสมดุลที่ดีที่สุดระหว่างความคมชัดของการควบคุมและความเสถียร มีโหมดควบคุมล็อกเฟืองท้ายที่ตั้งไว้ล่วงหน้า เช่นเดียวกับโหมดควบคุมด้วยตนเอง ซึ่งผู้ขับขี่สามารถใช้งานได้ตามสภาพการจราจร
[รุ่นปัจจุบัน (สเปคของรัสเซีย)]
Subaru WRX STI พร้อมเกียร์ธรรมดา
*1 รวมถึงการผลิตรถยนต์ที่มีระบบขับเคลื่อนสี่ล้อแบบเสียบปลั๊ก
*2 VTD: การกระจายแรงบิดแบบแปรผัน
*3 เฟืองท้ายลิมิเต็ดสลิปควบคุม
*4 DCCD: Active Center Differential
AWD สมมาตร
ระบบขับเคลื่อนสี่ล้อแบบสมมาตร
นับตั้งแต่เปิดตัวในปี 1972 เทคโนโลยี Symmetrical AWD (All-Wheel Drive) ได้รับการปรับปรุงอย่างต่อเนื่อง เสริมด้วยแนวต้าน เครื่องยนต์ซูบารุ BOXER ทำให้โครงสร้างสมมาตรสมบูรณ์แบบ สิ่งนี้ทำให้มั่นใจถึงประสิทธิภาพสูงสุดของกำลังเครื่องยนต์ ระดับสูงการยึดเกาะถนนและการทรงตัวของรถ ตลอดจนการกระจายน้ำหนักที่เหมาะสม การควบคุมรถอย่างสมบูรณ์จะคงอยู่ในแทบทุกสภาพการขับขี่ ทำให้ทุกระยะทางที่เดินทางกลายเป็นความสุข
แรงบิดของเครื่องยนต์ถูกส่งไปยังล้อทั้งสี่อย่างต่อเนื่องและให้การยึดเกาะสูงสุด ดังนั้นการจัดการยานพาหนะสูงสุด ดังนั้น ยิ่งการยึดเกาะของล้อกับถนนดีขึ้นเท่าใด คุณก็จะรู้สึกมั่นใจมากขึ้นเมื่ออยู่หลังพวงมาลัยรถของคุณ ข้อได้เปรียบนี้- กุญแจสู่ความสำเร็จใน สภาวะสุดขั้วไม่ว่าจะเป็นสภาพอากาศเลวร้ายหรือ สถานการณ์ฉุกเฉินเมื่อนับไปเป็นเศษส่วนของวินาที
ข้อดี
ความสมดุลที่ดีที่สุด
เมื่อคุณเลี้ยว แรงเหวี่ยงหนีศูนย์กลางจะดันรถไปที่ขอบถนน รถหมุนได้ไกลแค่ไหนขึ้นอยู่กับจุดศูนย์ถ่วง หากอยู่สูงก็จะต้องใช้เวลามากขึ้นในการคืนสมดุลและการควบคุมรถ ถ้ามันต่ำ - เช่น Subaru - ร่างกายจะหมุนน้อยลงและหันเหน้อยลง ทำให้รถมีความเสถียรมากขึ้น
ปรับปรุงความแข็งแรงของด้ามจับ
ระบบขับเคลื่อนสี่ล้อแบบถาวรมีข้อดีเหนือกว่าระบบขับเคลื่อน 2 ล้อ (2WD) โดยเฉพาะเมื่อเข้าโค้ง โดยการส่งกำลังผ่านทั้งสี่ล้อ รถจะบังคับเลี้ยวได้อย่างเป็นธรรมชาติและเป็นกลางเมื่อเข้าโค้ง หลีกเลี่ยงความเฉื่อยหรือการบังคับเลี้ยวมากเกินไปที่อาจนำไปสู่ความไม่มั่นคงและการชนได้
10.05.2006
หลังจากตรวจสอบแผน 4WD ที่ใช้ในโตโยต้าในรายละเอียดบางอย่างในวัสดุก่อนหน้านี้ กลับกลายเป็นว่ายังมีสูญญากาศข้อมูลกับแบรนด์อื่น ๆ ... อันดับแรก มาเริ่มใช้ระบบขับเคลื่อนสี่ล้อของรถยนต์ซูบารุ ซึ่งหลายคนเรียกว่า "มากที่สุด" จริง ขั้นสูง และถูกต้อง"
ตามธรรมเนียมแล้วกล่องเครื่องกลนั้นไม่น่าสนใจสำหรับเรา ยิ่งกว่านั้นทุกอย่างค่อนข้างโปร่งใสสำหรับพวกเขา - ตั้งแต่ช่วงครึ่งหลังของ 90s Subaru ทั้งหมดในกลไกมีระบบขับเคลื่อนสี่ล้อที่ซื่อสัตย์พร้อมสามส่วน (ส่วนต่างตรงกลางถูกบล็อกโดยคัปปลิ้งหนืดปิด) ในด้านลบ ควรกล่าวถึงการออกแบบที่ซับซ้อนเกินไปที่ได้จากการรวมแนวยาวเข้าด้วยกัน ติดตั้งเครื่องยนต์และขับเคลื่อนล้อหน้าแบบเดิม เช่นเดียวกับการปฏิเสธ Subarovites จากการใช้สิ่งที่มีประโยชน์อย่างไม่ต้องสงสัยเช่นการเปลี่ยนเกียร์ ในเวอร์ชัน "กีฬา" เดียว Impreza STiนอกจากนี้ยังมีเกียร์ธรรมดาขั้นสูงพร้อมดิฟเฟอเรนเชียล "ควบคุมด้วยอิเล็กทรอนิกส์" (DCCD) ซึ่งผู้ขับขี่สามารถเปลี่ยนระดับการบล็อกขณะเดินทาง ...
แต่อย่าพูดนอกเรื่อง 4WD หลักๆ ที่ใช้ในเกียร์อัตโนมัติในปัจจุบันที่ Subaru ทำงานอยู่นั้นมีอยู่ 2 ประเภท
|
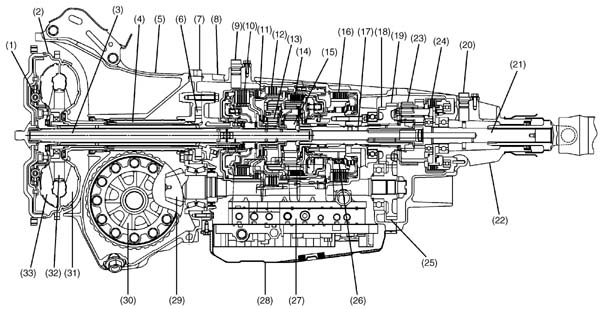
1.1. Active AWD / Active Torque Split AWD |
คงที่ ขับเคลื่อนล้อหน้า, ไม่มีเฟืองท้าย, การเชื่อมต่อล้อหลังกับคลัตช์ไฮโดรแมคคานิคอลควบคุมด้วยระบบอิเล็กทรอนิกส์
 |
|
1 - แดมเปอร์ล็อคตัวแปลงแรงบิด 2 - คลัตช์ตัวแปลงแรงบิด 3 - เพลาอินพุต 4 - เพลาขับ ปั้มน้ำมัน, 5 - ตัวเรือนคลัตช์ตัวแปลงแรงบิด, 6 - ปั้มน้ำมัน, 7 - ตัวเรือนปั๊มน้ำมัน, 8 - ตัวเรือนกระปุก, 9 - เซ็นเซอร์ความเร็วล้อกังหัน, คลัตช์ 10 - 4, 11 - คลัตช์ ย้อนกลับ, 12 - 2-4 เบรก, 13 - ชุดเกียร์ดาวเคราะห์ด้านหน้า, คลัตช์เกียร์ 14 - เกียร์ 1, 15 - ชุดเกียร์ดาวเคราะห์หลัง, 16 - เกียร์ 1 และเบรกถอยหลัง, 17 - เพลาส่งออกของกระปุกเกียร์, เกียร์โหมด 18 " P", 19 - เกียร์ไดรฟ์ด้านหน้า, 20 - เซ็นเซอร์ความเร็วเพลาส่งออกด้านหลัง, 21 - เพลาเอาต์พุตด้านหลัง, 22 - ก้าน, 23 - คลัตช์ A-AWD, 24 - เกียร์ขับเคลื่อนด้านหน้า, 25 - คลัตช์คลาดเคลื่อน, 26 - บล็อกวาล์ว, 27 - บ่อพัก 28 - เพลาขับหน้า 29 - เกียร์ไฮปอยด์, 30 - ล้อปั๊ม, 31 - สเตเตอร์, 32 - กังหัน |
อี ตัวเลือกนี้ได้รับการติดตั้งมาเป็นเวลานานใน Subaru ส่วนใหญ่ (ที่มีเกียร์อัตโนมัติประเภท TZ1) และเป็นที่รู้จักกันอย่างแพร่หลายจากรุ่น Legacy 89 อันที่จริง ระบบขับเคลื่อนสี่ล้อนี้ “ซื่อสัตย์” เหมือนกับ Toyota Active Torque Control รุ่นใหม่ ซึ่งเป็นระบบขับเคลื่อนล้อหลังแบบเดียวกันและหลักการ TOD (Torque on Demand) เดียวกัน ไม่มีส่วนต่างจากศูนย์กลาง และขับเคลื่อนล้อหลังด้วยคลัตช์ไฮโดรแมคคานิคอล (แพ็คเกจแรงเสียดทาน) ในกล่องขนย้าย
รูปแบบ Subar มีข้อดีบางประการในอัลกอริธึมการทำงานมากกว่าปลั๊กอิน 4WD ประเภทอื่น (โดยเฉพาะแบบที่ง่ายที่สุด เช่น V-Flex ดั้งเดิม) แม้ว่าจะมีขนาดเล็ก แต่ช่วงเวลาระหว่างการทำงานของ A-AWD จะถูกส่งกลับอย่างต่อเนื่อง (เว้นแต่ระบบจะถูกปิดโดยบังคับ) และไม่เพียงแต่เมื่อล้อหน้าลื่นไถลเท่านั้น แต่ยังมีประโยชน์และมีประสิทธิภาพมากกว่า ต้องขอบคุณไฮโดรเมคคานิกส์ แรงที่สามารถกระจายได้แม่นยำกว่าใน ATC ของระบบเครื่องกลไฟฟ้าเล็กน้อย นอกจากนี้ A-AWD ยังมีโครงสร้างที่ทนทานกว่า สำหรับเครื่องจักรที่มีคัปปลิ้งหนืดสำหรับต่อล้อหลัง อาจมีอันตรายจาก "รูปลักษณ์" ที่เฉียบคมขึ้นเอง ขับเคลื่อนล้อหลังผลัดกันตามมาด้วย "การบิน" ที่ไม่สามารถควบคุมได้ แต่ใน A-AWD ความน่าจะเป็นนี้แม้ว่าจะไม่ได้ยกเว้นอย่างสมบูรณ์ แต่ก็ลดลงอย่างมาก อย่างไรก็ตาม เมื่ออายุมากขึ้น ความสามารถในการคาดการณ์และความราบรื่นของการเชื่อมต่อของล้อหลังจะลดลงอย่างมาก
อัลกอริธึมของระบบยังคงเหมือนเดิมตลอดระยะเวลาเผยแพร่ โดยแก้ไขเพียงเล็กน้อยเท่านั้น
1) ภายใต้สภาวะปกติ เมื่อปล่อยคันเร่งจนสุด การกระจายแรงบิดระหว่างล้อหน้าและล้อหลังจะอยู่ที่ 95/5..90/10
2) ในขณะที่คุณกดแก๊ส แรงดันที่จ่ายให้กับชุดคลัตช์จะเริ่มเพิ่มขึ้น ดิสก์ค่อยๆ กระชับขึ้น และการกระจายแรงบิดเริ่มเปลี่ยนไปทาง 80/20 ... 70/30 ... เป็นต้น ความสัมพันธ์ระหว่างแรงดันแก๊สและท่อไม่ได้หมายความว่าเป็นเส้นตรง แต่ดูเหมือนพาราโบลามากกว่า ดังนั้นการกระจายตัวที่สำคัญจะเกิดขึ้นก็ต่อเมื่อเหยียบคันเร่งอย่างแรงเท่านั้น เมื่อเหยียบแป้นเหยียบแบบปิดสนิท คลัทช์แรงเสียดทานจะถูกกดด้วยความพยายามสูงสุดและการกระจายไปถึง 60/40 ... 55/45 แท้จริงแล้ว "50/50" ไม่สามารถทำได้ในรูปแบบนี้ - นี่ไม่ใช่ฮาร์ดล็อค
3) นอกจากนี้เซ็นเซอร์ความเร็วของเพลาส่งออกด้านหน้าและด้านหลังที่ติดตั้งบนกล่องทำให้สามารถระบุการลื่นของล้อหน้าหลังจากนั้นช่วงเวลาสูงสุดจะถูกนำกลับโดยไม่คำนึงถึงระดับการจ่ายก๊าซ ( ยกเว้นกรณีที่ปล่อยคันเร่งเต็มที่) ฟังก์ชันนี้ทำงานที่ความเร็วต่ำ สูงสุดประมาณ 60 กม./ชม.
4) เมื่อบังคับเข้าเกียร์ 1 (ตัวเลือก) คลัตช์จะถูกกดทันทีด้วยแรงดันสูงสุดที่เป็นไปได้ - ดังนั้นจึงกำหนด "สภาพภูมิประเทศที่ยากลำบาก" และไดรฟ์ยังคงเป็น "เต็มถาวร" มากที่สุด
5) เมื่อเสียบฟิวส์ "FWD" เข้ากับคอนเน็กเตอร์ จะไม่มีการจ่ายแรงดันเกินให้กับคลัตช์ และไดรฟ์จะดำเนินการอย่างต่อเนื่องที่ล้อหน้าเท่านั้น (การกระจาย "100/0")
6) เมื่อการพัฒนาดำเนินไป อิเล็กทรอนิกส์ยานยนต์การเลื่อนหลุดสะดวกขึ้นในการควบคุมตามมาตรฐาน เซ็นเซอร์ ABSและลดระดับการล็อคคลัตช์ระหว่างการเข้าโค้งหรือการเปิดใช้งานระบบ ABS
ควรสังเกตว่าการแจกแจงช่วงเวลาในพาสปอร์ตทั้งหมดนั้นมีให้ในรูปแบบคงที่เท่านั้น - ในระหว่างการเร่งความเร็ว / การชะลอตัวการกระจายน้ำหนักตามแกนจะเปลี่ยนไปดังนั้นช่วงเวลาจริงบนแกนจึงแตกต่างกัน (บางครั้ง "แตกต่างกันมาก") เช่นเดียวกับที่แตกต่างกัน ค่าสัมประสิทธิ์การยึดเกาะของล้อกับถนน
|
1.2. VTD AWD |
ขับเคลื่อนสี่ล้อถาวร พร้อมเฟืองท้ายกลาง ล็อคคลัตช์ไฮโดรแมคคานิคอลควบคุมด้วยระบบอิเล็กทรอนิกส์
 |
|
1 - แดมเปอร์ล็อคตัวแปลงแรงบิด, 2 - คลัตช์ตัวแปลงแรงบิด, 3 - เพลาอินพุต, 4 - เพลาขับปั๊มน้ำมัน, 5 - ตัวเรือนคลัตช์ตัวแปลงแรงบิด, 6 - ปั้มน้ำมัน, 7 - ตัวเรือนปั๊มน้ำมัน, 8 - ตัวเรือนเกียร์, 9 - ล้อกังหันเซ็นเซอร์ความเร็ว, คลัตช์ 10 - 4, 11 - คลัตช์ถอยหลัง, เบรก 12 - 2-4, 13 - ชุดเกียร์ดาวเคราะห์ด้านหน้า, คลัตช์ 14 - ที่ 1, 15 - ชุดเกียร์ดาวเคราะห์หลัง, 16 - เกียร์เบรกที่ 1 และถอยหลัง , 17 - เพลาข้อเหวี่ยง, เกียร์โหมด 18 - "P", 19 - เฟืองขับหน้า, 20 - เซ็นเซอร์ความเร็วเพลาส่งออกด้านหลัง, 21 - เพลาเอาต์พุตด้านหลัง, 22 - ก้าน, 23 - ดิฟเฟอเรนเชียลกลาง, 24 - คลัตช์ล็อกเฟืองท้ายกลาง, 25 - เกียร์ขับเคลื่อนด้านหน้า 26 - คลัตช์ควง 27 - บล็อกวาล์ว 28 - บ่อพัก 29 - เพลาส่งออกด้านหน้า 30 - เกียร์ไฮปอยด์ 31 - ใบพัด 32 - สเตเตอร์ 33 - กังหัน . |
รูปแบบ VTD (Variable Torque Distribution) ใช้กับรุ่นที่มีขนาดใหญ่น้อยกว่าที่มีการส่งสัญญาณอัตโนมัติของประเภท TV1 (และ TZ102Y ในกรณีของ Impreza WRX GF8) - ตามกฎแล้วทรงพลังที่สุดในช่วง ที่นี่ทุกอย่างเป็นไปตาม "ความซื่อสัตย์" - ระบบขับเคลื่อนสี่ล้อเป็นแบบถาวรโดยมีส่วนต่างศูนย์กลางอสมมาตร (45:55) ซึ่งถูกบล็อกโดยคลัตช์ไฮโดรแมคคานิคัลที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ อย่างไรก็ตาม ตั้งแต่ช่วงกลางทศวรรษที่ 80 Toyota 4WD ได้ทำงานบนหลักการเดียวกันในกล่อง A241H และ A540H แต่ตอนนี้อนิจจามันยังคงอยู่ในรุ่นขับเคลื่อนล้อหลังดั้งเดิมเท่านั้น (FullTime-H หรือ i- ขับเคลื่อนสี่ล้อ)
Subaru มักจะติดตั้งเทคโนโลยีขั้นสูงเข้ากับ VTD ระบบ VDC(Vehicle Dynamic Control) ในความเห็นของเรา - ระบบ เสถียรภาพของอัตราแลกเปลี่ยนหรือการรักษาเสถียรภาพ เมื่อเริ่มต้น ส่วนประกอบ, TCS (แรงฉุด ระบบควบคุม) ทำให้ล้อลื่นไถลช้าลงและทำให้เครื่องยนต์บีบคอเล็กน้อย (ประการแรก โดยจังหวะการจุดระเบิด และประการที่สอง แม้จะปิดหัวฉีดบางส่วนก็ตาม) ผลงานคลาสสิกขณะเดินทาง การรักษาเสถียรภาพแบบไดนามิก. ต้องขอบคุณความสามารถในการทำให้ล้อใด ๆ ช้าลงโดยพลการ VDC จำลอง (จำลอง) ล็อคเฟืองท้ายแบบไขว้ แน่นอนว่านี่เป็นสิ่งที่ดี แต่คุณไม่ควรพึ่งพาความสามารถของระบบดังกล่าวอย่างจริงจัง - จนถึงขณะนี้ยังไม่มีผู้ผลิตรถยนต์รายใดที่สามารถนำ "ล็อคอิเล็กทรอนิกส์" เข้ามาใกล้กลไกดั้งเดิมในแง่ของความน่าเชื่อถือและที่สำคัญที่สุด , ประสิทธิภาพ.
|
1.3. "วี เฟล็กซ์" |
ขับเคลื่อนล้อหน้าแบบถาวร ไม่มีดิฟเฟอเรนเชียล คัปปลิ้งหนืดสำหรับล้อหลัง
สิ่งที่ควรค่าแก่การกล่าวถึงคือ 4WD ซึ่งใช้กับรถรุ่นเล็กที่มี CVT (เช่น Vivio และ Pleo) รูปแบบนี้ง่ายยิ่งขึ้นไปอีก - ระบบขับเคลื่อนล้อหน้าแบบถาวรและเพลาล้อหลัง "เชื่อมต่อ" ด้วยข้อต่อแบบหนืดเมื่อล้อหน้าลื่นไถล
เราได้กล่าวแล้วว่าใน ภาษาอังกฤษภายใต้แนวคิด LSD ทุกคนได้รับ ดิฟเฟอเรนเชียลล็อคตัวเอง แต่ในประเพณีของเราสิ่งนี้มักจะเรียกว่าระบบที่มีคัปปลิ้งหนืด แต่ Subaru ใช้ความแตกต่างของ LSD ทั้งหมดในการออกแบบที่แตกต่างกันในรถยนต์ของพวกเขา ...
2.1. แบบเก่า หนืดLSD
 |
 |
ในเฟืองท้าย LSD เกียร์ด้านขวาและด้านซ้ายจะ "เชื่อมต่อ" ผ่านคัปปลิ้งหนืด - ขวา เพลาข้อเหวี่ยงผ่านถ้วยและประกอบกับดุมคลัตช์ ตัวเรือนคลัตช์เป็นชิ้นเดียวกับเฟืองของเพลาเพลาซ้าย ในช่องที่เต็มไปด้วยของเหลวซิลิโคนและอากาศ มีแผ่นดิสก์อยู่บนร่องของฮับและลำตัว - วงแหวนรอบนอกถูกยึดไว้โดยวงแหวนตัวแบ่งส่วนด้านในสามารถเคลื่อนที่ไปตามแกนเล็กน้อย (สำหรับความเป็นไปได้ที่จะได้รับ "เอฟเฟกต์โคก") คลัตช์ทำงานโดยตรงกับความแตกต่างของความเร็วระหว่างเพลาเพลาขวาและเพลาซ้าย
 |
ในระหว่างการเคลื่อนที่เป็นเส้นตรง ล้อด้านขวาและด้านซ้ายจะหมุนด้วยความเร็วเท่ากัน ถ้วยเฟืองท้ายและเฟืองด้านข้างจะเคลื่อนที่ไปด้วยกัน และช่วงเวลาจะถูกแบ่งเท่าๆ กันระหว่างเพลาเพลา เมื่อความถี่ของการหมุนล้อแตกต่างกัน ตัวเรือนและดุมล้อที่มีจานยึดอยู่กับตัวจะเคลื่อนที่สัมพันธ์กัน ทำให้เกิดแรงเสียดทานใน ของเหลวซิลิโคน. ด้วยเหตุนี้ในทางทฤษฎี (เฉพาะในทางทฤษฎี) ควรมีการกระจายแรงบิดระหว่างล้อ
2.2. ใหม่ LSD . หนืด
 |
 |
- เกียร์ธรรมดา Impreza WRX จนถึงปี 1997
- Forester SF, SG (ยกเว้นเวอร์ชันเต็มเวลา VTD + VDC)
- Legacy 2.0T, 2.5 (ยกเว้นเวอร์ชันเต็มเวลา VTD + VDC)
ของเหลวทำงาน - น้ำมันเกียร์ คลาส API GL-5 ความหนืดตามมาตรฐาน SAE 75W-90 ความจุ ~0.8 / 1.1 ลิตร
2.3. แรงเสียดทานLSD
 |
ลักษณะต่อไปของรูปลักษณ์คือส่วนต่างของกลไกการเสียดสี ซึ่งใช้กับ Impreza STi เวอร์ชันส่วนใหญ่ตั้งแต่ช่วงกลางทศวรรษที่ 90 หลักการทำงานของมันง่ายยิ่งขึ้นไปอีก - เกียร์ด้านข้างมีระยะเล่นตามแนวแกนน้อยที่สุด มีการติดตั้งชุดแหวนรองระหว่างเฟืองกับตัวเรือนส่วนต่าง เมื่อมีความแตกต่างของความเร็วระหว่างล้อ เฟืองท้ายจะทำงานเหมือนกับล้ออิสระทั่วไป ดาวเทียมเริ่มหมุนในขณะที่เกียร์ของเพลาเพลามีภาระส่วนประกอบในแนวแกนซึ่งกดชุดแหวนรองและส่วนต่างถูกบล็อกบางส่วน
ความแตกต่างของแรงเสียดทานแบบลูกเบี้ยวถูกใช้ครั้งแรกโดย Subaru ในปี 1996 บนเทอร์โบ Imprezas จากนั้นจึงปรากฏในรุ่น Forester STi หลักการทำงานของมันคือที่รู้จักกันดีในหมู่คนส่วนใหญ่จากรถบรรทุกคลาสสิก ชิชิก และ UAZ ของเรา
อันที่จริงไม่มีการเชื่อมต่อที่เข้มงวดระหว่างเฟืองขับของเฟืองท้ายและกึ่งแกน ความแตกต่างของความเร็วเชิงมุมของการหมุนนั้นมาจากการลื่นไถลของกึ่งแกนหนึ่งเมื่อเทียบกับอีกแกนหนึ่ง ตัวคั่นหมุนไปพร้อมกับกล่องเฟืองท้าย กุญแจ (หรือ "แคร็กเกอร์") ที่ติดอยู่กับตัวคั่นสามารถเคลื่อนที่ไปในทิศทางตามขวางได้ ส่วนที่ยื่นออกมาและโพรงของเพลาลูกเบี้ยวพร้อมกับปุ่มต่างๆ ทำให้เกิดการส่งสัญญาณของการหมุนเหมือนโซ่
 |
ขอบเขต (ตามแบบตลาดภายในประเทศ):
- Impreza WRX หลังปี 1996
- Forester STi
น้ำมันทำงานเป็นน้ำมันเกียร์ธรรมดาของคลาส API GL-5 ความหนืดตาม SAE 75W-90 ความจุ ~ 0.8 ลิตร
Evgeniy
มอสโก
[ป้องกันอีเมล]เว็บไซต์
Legion-Autodata
ข้อมูลเกี่ยวกับการบำรุงรักษาและซ่อมแซมรถสามารถพบได้ในหนังสือ (หนังสือ):
แม้ว่าระบบขับเคลื่อนสี่ล้อของ Subaru ทั้งหมดจะมีชื่อและชื่อเหมือนกัน แต่ในปัจจุบันมีการใช้งานระบบขับเคลื่อนสี่ล้อ Subaru AWD ที่แตกต่างกันหลายประการ
ทั้งหมด รุ่นซูบารุยกเว้นคูเป้ขับเคลื่อนล้อหลัง Subaru BRZ ติดตั้งระบบขับเคลื่อนสี่ล้อแบบสมมาตรมาตรฐาน Subaru AWD แต่ถึงแม้จะเป็นชื่อสามัญ แต่ทุกวันนี้ก็มีระบบขับเคลื่อนสี่ล้อที่แตกต่างกันอย่างน้อยสี่ระบบที่ใช้อยู่
ระบบขับเคลื่อนสี่ล้อมาตรฐานโดยอิงจากดิฟเฟอเรนเชียลล็อคตัวเองตรงกลางและคัปปลิ้งหนืด (ซีดีจี)
นี่คือระบบที่คนส่วนใหญ่เชื่อมโยงกับระบบขับเคลื่อนสี่ล้อ พบได้ในรถยนต์ซูบารุส่วนใหญ่ที่มีเกียร์ธรรมดา เป็นระบบขับเคลื่อนล้อที่สมมาตรที่สุด โดยแรงบิดภายใต้สภาวะการขับขี่ปกติจะถูกแบ่ง 50:50 ระหว่างเพลาหน้าและเพลาหลัง

รถยนต์ Subaru เช่น Subaru WRX 2011 ที่มีเกียร์ธรรมดามีระบบขับเคลื่อนสี่ล้อโดยอิงจากเฟืองท้ายแบบล็อคตัวเองและข้อต่อแบบหนืด
เมื่อตรวจพบการเลื่อนหลุดของล้อหน้าหรือล้อหลัง เฟืองกลางสามารถส่งแรงบิดไปยังเพลาของล้อได้มากถึง 80 เปอร์เซ็นต์ จับดีขึ้นกับถนน ดิฟเฟอเรนเชียลใช้คลัตช์หนืดซึ่งทำงานโดยไม่ต้องใช้ตัวช่วย การควบคุมคอมพิวเตอร์และตอบสนองต่อความแตกต่างทางกลไกในการยึดเกาะของล้อ
ระบบขับเคลื่อนสี่ล้อประเภทนี้มีมานานแล้ว และการปรากฏตัวของมันใน Subaru WRX ปี 2015 หมายความว่าระบบจะไม่ไปทุกที่ในเร็วๆ นี้ ง่ายๆแบบนี้ ระบบที่เชื่อถือได้เป็น ม้าทำงานระบบขับเคลื่อนสี่ล้อของซูบารุ ระบบนี้รับประกันความปลอดภัยในการขับขี่แบบสปอร์ตโดยใช้ประโยชน์จากการยึดเกาะถนนให้ได้มากที่สุด
ระบบขับเคลื่อนสี่ล้อที่อิงจากเฟืองท้ายล็อกตัวเองระหว่างเพลาและข้อต่อแบบหนืดสามารถพบได้บน Subaru Imprezaการตัดแต่ง 2014 2.0i บน 2014 XV Crosstrek พร้อมเกียร์ธรรมดา 5 สปีด; บน Subaru Outback 2014 Subaru Forester 6-speed manual และ 2015 WRX 6-speed manual
ระบบขับเคลื่อนสี่ล้อพร้อมการกระจายแรงบิดแบบแปรผันสำหรับรถยนต์ที่มีระบบเกียร์อัตโนมัติ (VTD)
ล่าสุด ซูบารุเริ่มเปลี่ยนรถยนต์ส่วนใหญ่จากเกียร์อัตโนมัติที่แปลงแรงบิดมาตรฐานเป็น การส่งตัวแปรอย่างต่อเนื่อง(CVT)

Legacy, Outback และ Tribeca ด้วยเครื่องยนต์ 3.6 ลิตรอันทรงพลังใช้ระบบขับเคลื่อนสี่ล้อแบบกระจายแรงบิดสำหรับรถยนต์
แต่ก็ยังมีรถที่ใช้ระบบนี้อยู่
Variable Torque Distribution (VTD) รุ่นขับเคลื่อนสี่ล้อแบบสมมาตรที่ใช้กับ Legacy, Outback, Tribeca พร้อมเครื่องยนต์หกสูบ 3.6 ลิตรและห้าสปีด เกียร์อัตโนมัติเกียร์ ในกรณีนี้ การกระจายแรงบิดเริ่มต้นคือ 45:55 โดยจะเปลี่ยนไปทางเพลาล้อหลัง และแทนที่จะใช้เฟืองท้ายแบบหนืด จะใช้คลัตช์ไฮดรอลิกแบบหลายแผ่นร่วมกับเฟืองท้ายแบบดาวเคราะห์
เมื่อตรวจพบการลื่นตามสัญญาณที่ได้รับจากเซ็นเซอร์วัดการลื่นของล้อตำแหน่ง วาล์วปีกผีเสื้อและ แรงเบรกคลัตช์ควบคุมด้วยระบบอิเล็กทรอนิกส์สามารถล็อคการกระจายแรงบิด 50:50 ระหว่างเพลาหน้าและเพลาหลังที่ต้องการการยึดเกาะสูงสุด (ล้อบนถนน)
ในขณะที่คัปปลิ้งแบบหนืดเชิงกลไกล้วนๆ นั้นเรียบง่ายกว่าและอาจมีความยืดหยุ่นมากกว่า แต่ระบบ VTD ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์มีข้อได้เปรียบของการทำงานแบบแอกทีฟมากกว่าแบบรีแอกทีฟ แรงบิดเคลื่อนที่ระหว่างเพลาได้เร็วกว่าระบบกลไกจะทำได้
ระบบขับเคลื่อนสี่ล้อพร้อมการกระจายแรงบิดแบบแอคทีฟ (ACT)

ด้วยการเปลี่ยนไปใช้ CVT รุ่น Subaru เช่น XV Crosstrek ก็ย้ายไปใช้ระบบ 4WD ด้วย ไดรฟ์ AWDมีการชดเชยเล็กน้อยไปทางเพลาหน้า
"Subs" ที่ใหม่กว่าที่ติดตั้งระบบ CVT ใช้ระบบขับเคลื่อนสี่ล้อ (AWD) รุ่นที่สามแล้ว ระบบขับเคลื่อนสี่ล้อนี้คล้ายกับระบบ VTD ที่อธิบายข้างต้น - ทั้งคู่ใช้คลัตช์หลายแผ่นที่ควบคุมด้วยระบบอิเล็กทรอนิกส์เพื่อจัดการแรงบิด แต่ระบบ CVT จะกระจายแรงบิดในอัตราส่วน 60:40 โดยมีการชดเชยไปทางเพลาหน้า
ระบบขับเคลื่อนสี่ล้อนี้เรียกอีกอย่างว่า AWD พร้อม Active Torque Sharing (ACT) ตัวแปลงแรงบิดแบบหลายแผ่นที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ดั้งเดิมของ Subaru จะปรับการกระจายแรงบิดด้านหน้าไปด้านหลังตามเวลาจริงตามสภาพการขับขี่
การใช้ระบบนี้ช่วยเพิ่มประสิทธิภาพและความเสถียรของรถ คุณสามารถค้นหาระบบนี้ในรุ่น XV Crosstrek ใหม่ Foresterปี 2014, 2015 WRX และ WRX STI ใหม่ และรุ่นเก่ากว่า เช่น Legacy 2014, Outback 2014
ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายแบบมัลติโหมด (DCCD)
นอกจากระบบขับเคลื่อนสี่ล้อที่อธิบายข้างต้นแล้ว รถยนต์ซูบารุนอกจากนี้ยังใช้รูปแบบอื่น ๆ ของระบบขับเคลื่อนสี่ล้อแบบสมมาตรซึ่งไม่ได้ใช้อีกต่อไป แต่ระบบสุดท้ายที่เราจะพูดถึงในวันนี้คือระบบที่ใช้ใน WRX STI

ตรงด้านล่างที่จับ SI-Drive คือสวิตช์ที่ช่วยให้ไดรเวอร์ WRX STI เปลี่ยนความสมดุลระหว่างดิฟเฟอเรนเชียลตรงกลางทั้งสองได้
ระบบนี้ใช้ค่ากลางสองค่า หนึ่งคือควบคุมด้วยระบบอิเล็กทรอนิกส์และให้ ออนบอร์ดคอมพิวเตอร์ซูบารุ การควบคุมที่ดีมากกว่าการกระจายแรงบิดระหว่างเพลา อีกประการหนึ่งคืออุปกรณ์เชิงกลที่ตอบสนองต่ออิทธิพลภายนอกได้เร็วกว่า "เพื่อนร่วมงาน" แบบอิเล็กทรอนิกส์ ในทางอุดมคติแล้ว ประโยชน์ของผู้ขับขี่คือการใช้ "โลก" ทางอิเล็กทรอนิกส์เชิงรุกและทางกลอย่างดีที่สุด
โดยทั่วไป ค่าต่างเหล่านี้ใช้ความแตกต่างโดยธรรมชาติ โดยจะรวมเข้าด้วยกันอย่างกลมกลืนโดยเฟืองของดาวเคราะห์ แต่ผู้ขับขี่สามารถเปลี่ยนระบบไปยังส่วนต่างของศูนย์กลางได้โดยใช้ ระบบอิเล็กทรอนิกส์ไดรฟเวอร์คอนโทรลเซ็นเตอร์ดิฟเฟอเรนเชียล (DCCD) - ดิฟเฟอเรนเชียลที่ควบคุมโดยคนขับ
การกระจายแรงบิดสำหรับระบบ DCCD คือ 41:59 ออฟเซ็ตไปทางเพลาล้อหลัง ซึ่งเป็นระบบขับเคลื่อนทุกล้อที่เน้นสมรรถนะสำหรับการเล่นกีฬาที่จริงจัง
การกระจายแรงบิดด้านข้าง
จนถึงตอนนี้ เราได้ทราบแล้วว่า Subaru รุ่นใหม่กระจายแรงบิดระหว่างเพลาหน้าและเพลาหลังอย่างไร แล้วการกระจายแรงบิดระหว่างล้อ ระหว่างด้านซ้ายและด้านขวาล่ะ สำหรับทั้งเพลาหน้าและเพลาหลัง คุณมักจะพบส่วนต่างมาตรฐาน แบบเปิด(เช่นไม่บล็อก) แต่มากกว่า โมเดลที่ทรงพลัง(เช่น รุ่น WRX และ Legacy 3.6R) มักจะติดตั้งเฟืองท้ายแบบลิมิเต็ดสลิปบนเพลาหลังเพื่อเพิ่มการยึดเกาะบนเพลาล้อหลังเมื่อเข้าโค้ง
WRX STI ยังมีเฟืองท้ายแบบลิมิเต็ดสลิปบนเพลาหน้าเพื่อเพิ่มการยึดเกาะทุกล้อและ WRX . ล่าสุดปี 2015 และ 2015 WRX STI ยังใช้ระบบกระจายแรงบิดแบบเบรกที่เบรก ล้อด้านในเมื่อหมุนเพื่อให้แน่ใจว่ากำลังถูกถ่ายโอนไปยัง ข้างนอกเมื่อเลี้ยวและลดรัศมีวงเลี้ยว




