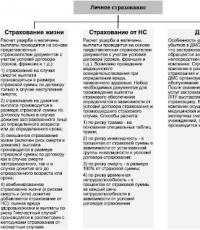
ระบบขับเคลื่อนสี่ล้อของซูบารุ ซูบารุขับเคลื่อนสี่ล้อ ระบบขับเคลื่อนสี่ล้อแบบสมมาตร
ปัจจุบันมีระบบขับเคลื่อนสี่ล้อที่เป็นที่รู้จักมากมายสำหรับรถยนต์ เรามาดูตัวอย่างรถยนต์ Subaru ที่ใช้บ่อยที่สุดสองรุ่นกัน เนื่องจากบางรุ่นมีชื่อและชื่อเหมือนกัน ระบบขับเคลื่อนสี่ล้อ Subaru AWD มีหลายรุ่น
รุ่นดังกล่าวทั้งหมด (ยกเว้นรถเก๋ง Subaru BRZ ขับเคลื่อนล้อหลัง) มีระบบขับเคลื่อนสี่ล้อ AWD แบบสมมาตรมาตรฐาน ชื่อนี้เป็นเรื่องธรรมดา แต่มีการใช้การดัดแปลงระบบขับเคลื่อนสี่ล้อสี่แบบ
ระบบขับเคลื่อนสี่ล้อมาตรฐานที่ใช้เฟืองท้ายลิมิเต็ดสลิปตรงกลางและคัปปลิ้งหนืด (CDG)
คนส่วนใหญ่คิดว่าระบบประเภทนี้เกี่ยวข้องกับการขับเคลื่อนทุกล้อ ซึ่งเป็นเรื่องปกติมากในรถยนต์ยี่ห้อเดียวกันนั่นเองค่ะ เกียร์ธรรมดาการแพร่เชื้อ รุ่นนี้คือรูปแบบการขับเคลื่อนสี่ล้อแบบสมมาตร ภายใต้สภาวะปกติ แรงบิดจะอยู่ในอัตราส่วนของล้อหน้าและ เพลาล้อหลัง 50 ถึง 50
เมื่อรถลื่นไถล เฟืองท้ายซึ่งอยู่ระหว่างเพลาจะสามารถส่งแรงบิดไปยังเพลาหน้าได้มากถึง 80% ฟังก์ชันนี้ช่วยให้มั่นใจได้ ด้ามจับที่ดียางกับพื้นผิวถนน ส่วนต่างดังกล่าวใช้การคัปปลิ้งหนืด เพื่อให้สามารถตอบสนองต่อความแตกต่างทางกลไกในการยึดเกาะของยางโดยไม่ต้องมีการแทรกแซงจากคอมพิวเตอร์
คุณสามารถดูประเภทขับเคลื่อนสี่ล้อ cdg บนรถได้ ซูบารุ ฟอเรสเตอร์มี กระปุกเกียร์หกสปีดการแพร่เชื้อ
ไดรฟ์ประเภทนี้มีการใช้งานมาเป็นเวลานานและการเกิดขึ้น เวอร์ชั่นใหม่ปีหน้าเพียงแต่หมายความว่าเขาจะไม่หายไปในเร็ว ๆ นี้ โมเดลมีความน่าเชื่อถือและ ระบบที่เรียบง่ายขับเคลื่อนสี่ล้อซึ่งสามารถให้มาก การขับขี่อย่างปลอดภัยเมื่อใช้แรงฉุดที่มีอยู่
ควรสังเกตว่าคุณสามารถดูประเภทของ cdg ขับเคลื่อนสี่ล้อบนรถยนต์ได้ ซูบารุ อิมเพรสซ่าปี 2014 ด้วยเครื่องยนต์ 2 ลิตร เช่นเดียวกับ XV Crosstrek ซึ่งมีเกียร์ธรรมดา 5 สปีด และใน Ouback และ Forester ซึ่งมีกระปุกเกียร์ 6 สปีด
ระบบขับเคลื่อนสี่ล้อพร้อมการกระจายแรงบิดแบบแปรผันสำหรับรถยนต์เกียร์อัตโนมัติ (VTD)
เป็นสิ่งสำคัญมากที่จะต้องทราบว่าข้อกังวลของ Subaru ได้เริ่มส่งผลกระทบส่วนใหญ่แล้ว ยานพาหนะจากมาตรฐานอัตโนมัติไปจนถึง การส่งผ่านตัวแปรอย่างต่อเนื่อง(ซีวีที) ในขณะเดียวกันตอนนี้คุณยังสามารถค้นหารถยนต์ที่มีระบบดังกล่าวได้
ระบบขับเคลื่อนสี่ล้อแบบสมมาตร ซึ่งเกี่ยวข้องกับการใช้การกระจายแรงบิดแบบแปรผัน มีอยู่ใน Tribeca (พร้อมเครื่องยนต์ 3.6i และ 6 สูบ รวมถึงเกียร์ 5 สปีด), Outback และ Legacy ที่นี่มีการเปลี่ยนแปลงของแรงบิดไปทางเพลาล้อหลังในสัดส่วน 45 ถึง 55 แทนที่จะใช้เฟืองท้ายแบบศูนย์กลางที่มีคัปปลิ้งแบบหนืด จะใช้เฟืองท้ายแบบหลายดิสก์ที่นี่ คลัตช์ไฮดรอลิกซึ่งจะนำมารวมกับส่วนต่างของเวอร์ชันดาวเคราะห์
เมื่อตรวจพบการลื่นไถล สัญญาณจะถูกส่งจากเซ็นเซอร์ที่ติดตั้งเพื่อวัดการลื่นไถลของล้อ รวมถึงแรงเบรกและตำแหน่งของปีกผีเสื้อที่อยู่ใกล้ปีกผีเสื้อ ในกรณีนี้ แรงบิดจะกระจายเท่าๆ กันไปตามเพลา (50 ถึง 50) เพื่อให้ล้อยึดเกาะกับพื้นผิวยางมะตอยได้สูงสุด
การมีเพศสัมพันธ์แบบหนืดเชิงกลอย่างสมบูรณ์นั้นง่ายกว่าและยืดหยุ่นกว่ามาก ระบบ VTD มีข้อได้เปรียบตรงที่มีส่วนประกอบแบบแอคทีฟมากกว่าแบบรีแอคทีฟ ซึ่งสิ่งนี้ทำได้ ความเร็วสูงการเคลื่อนที่ของแรงบิดระหว่างเพลา ระบบกลไกไม่สามารถอวดได้
ระบบขับเคลื่อนสี่ล้อพร้อม Active Torque Vectoring (ACT)
ใหม่ รุ่นซูบารุพวกเขาใช้ระบบขับเคลื่อนสี่ล้อเวอร์ชันที่สามอยู่แล้ว โดยเฉพาะอย่างยิ่งมีความคล้ายคลึงกันหลายประการกับเวอร์ชันก่อนหน้า - มันยังเกี่ยวข้องกับการใช้ระบบหลายดิสก์ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ในอัตราส่วน 60 ถึง 40 พร้อมการเปลี่ยนแรงบิดไปที่เพลาหน้า

ระบบขับเคลื่อนสี่ล้อแบบ act ใช้กับรุ่น Subaru Legacy 2014
AWD นี้มีการกระจายแรงบิดแบบแอคทีฟที่เรียกว่า ACT ต้องขอบคุณคลัตช์ส่งแรงบิดแบบหลายแผ่นแบบเดิมซึ่งควบคุมด้วยระบบอิเล็กทรอนิกส์ การกระจายแรงบิดระหว่างเพลาแบบเรียลไทม์จึงสอดคล้องกับสภาพการขับขี่ของรถ
ระบบขับเคลื่อนสี่ล้อนี้ช่วยให้คุณเพิ่มทั้งความเสถียรและประสิทธิภาพของเครื่องจักร ระบบขับเคลื่อนสี่ล้อแบบ act ใช้กับรุ่น Subaru XV Crosstrek, Legacy 2014, Outback 2014, WRX และ WRX STI 2015
ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายมัลติโหมด (DCCD)
นอกเหนือจากระบบขับเคลื่อนสี่ล้อที่อธิบายไว้ข้างต้นแล้ว รถยนต์ Subaru ยังใช้ตัวเลือกขับเคลื่อนสี่ล้อแบบสมมาตรอื่นๆ ที่ไม่ได้ใช้งานอีกต่อไป แต่ระบบสุดท้ายที่เราจะพูดถึงในวันนี้คือระบบที่พบใน WRX STI
ระบบนี้ใช้เฟืองท้ายสองตัว หนึ่งควบคุมด้วยระบบอิเล็กทรอนิกส์และจัดเตรียมคอมพิวเตอร์ออนบอร์ด Subaru ด้วย การควบคุมที่ดีเหนือการกระจายแรงบิดระหว่างเพลา อีกคนหนึ่งคือ อุปกรณ์เครื่องจักรกลซึ่งสามารถตอบสนองต่ออิทธิพลภายนอกได้เร็วกว่า "เพื่อนร่วมงาน" ทางอิเล็กทรอนิกส์ ตามหลักการแล้ว ประโยชน์ของผู้ขับขี่คือการได้รับสิ่งที่ดีที่สุดจาก 'โลก' ที่ตอบสนองเชิงรุกทางอิเล็กทรอนิกส์และทางกลไก
โดยทั่วไปแล้ว ความแตกต่างเหล่านี้ใช้ประโยชน์จากความแตกต่างโดยธรรมชาติ - ในขณะที่นำมารวมกันอย่างกลมกลืน เกียร์ดาวเคราะห์- แต่ผู้ขับขี่สามารถเปลี่ยนระบบไปทางเฟืองท้ายตรงกลางได้โดยใช้ ระบบอิเล็กทรอนิกส์เฟืองท้ายควบคุมคนขับ (DCCD) - " เซ็นเตอร์ดิฟเฟอเรนเชียล,คนขับดำเนินการ"
การกระจายแรงบิดสำหรับระบบ DCCD คือ 41:59 โดยเอียงไปทางเพลาล้อหลัง ระบบขับเคลื่อนสี่ล้อนี้ได้รับการออกแบบมาให้มีสมรรถนะสูงสุด ลักษณะการขับขี่สำหรับการแข่งขันกีฬาที่จริงจัง
การกระจายแรงบิดด้านข้าง
จนถึงตอนนี้เราได้ทราบวิธีแล้ว ซูบารุสมัยใหม่กระจายแรงบิดระหว่างเพลาหน้าและเพลาหลัง แต่การกระจายแรงบิดระหว่างล้อ ระหว่างด้านซ้ายและด้านขวาล่ะ? โดยทั่วไปแล้วคุณจะพบเฟืองท้ายแบบมาตรฐานทั้งบนเพลาหน้าและเพลาหลัง ประเภทเปิด(กล่าวคือไม่อยู่ภายใต้การปิดกั้น) มากกว่า โมเดลอันทรงพลัง(เช่น รุ่น WRX และ Legacy 3.6R) มักติดตั้งเฟืองท้ายแบบลิมิเต็ดสลิปบนเพลาล้อหลัง เพื่อปรับปรุงการยึดเกาะบนเพลาล้อหลังระหว่างการเข้าโค้ง
WRX STI ยังมีเฟืองท้ายแบบลิมิเต็ดสลิปบนเพลาหน้าเพื่อการยึดเกาะทุกล้อสูงสุด WRX ปี 2015 และ WRX STI รุ่นใหม่ล่าสุดปี 2015 ยังใช้ระบบเวกเตอร์แรงบิดที่ใช้เบรกซึ่งใช้การเบรก ล้อด้านในเมื่อหมุนเพื่อให้แน่ใจว่ามีการถ่ายโอนพลังงานไปยัง ด้านนอกเมื่อเลี้ยวและลดรัศมีวงเลี้ยวลง
หลังจากตรวจสอบวัสดุก่อนหน้านี้อย่างละเอียดเกี่ยวกับรูปแบบ 4WD ที่ใช้กับ Toyota แล้ว พบว่ายังมีสุญญากาศข้อมูลสำหรับแบรนด์อื่นๆ ก่อนอื่นเรามาดูรถยนต์ขับเคลื่อนสี่ล้อของ Subaru ซึ่งหลายคนเรียกว่า "สมจริงที่สุด ล้ำหน้าและถูกต้องที่สุด"
ตามเนื้อผ้า เราไม่ค่อยสนใจเกียร์ธรรมดามากนัก ยิ่งไปกว่านั้น ทุกอย่างค่อนข้างโปร่งใสสำหรับพวกเขา - ตั้งแต่ช่วงครึ่งหลังของทศวรรษที่ 90 Subaru แบบธรรมดามีระบบขับเคลื่อนสี่ล้อที่ซื่อสัตย์พร้อมเฟืองท้ายสามแบบ (อันตรงกลางถูกบล็อกโดยคัปปลิ้งหนืดแบบปิด) จาก ด้านลบเป็นมูลค่าการกล่าวขวัญถึงการออกแบบที่ซับซ้อนมากเกินไปซึ่งเป็นผลมาจากการรวมตามยาว เครื่องยนต์ที่ติดตั้งและขับเคลื่อนล้อหน้าในตอนแรก และยังเป็นการปฏิเสธของ Subarovites จากการใช้สิ่งที่มีประโยชน์อย่างไม่ต้องสงสัยเช่นเกียร์ทด ในรุ่น "สปอร์ต" บางรุ่นยังมีระบบเกียร์ธรรมดาขั้นสูงพร้อมเฟืองท้ายแบบ "ควบคุมด้วยระบบอิเล็กทรอนิกส์" ซึ่งผู้ขับขี่สามารถเปลี่ยนระดับการล็อคได้ทันที...
แต่อย่าให้ฟุ้งซ่าน ระบบขับเคลื่อน 4 ล้อหลักๆ มีอยู่ 2 ประเภทที่ใช้ในระบบเกียร์อัตโนมัติที่ Subarus ใช้อยู่ในปัจจุบัน
1. AWD ที่ใช้งานอยู่


ตัวเลือกนี้ได้รับการติดตั้งมานานแล้วใน Subarus ส่วนใหญ่ (พร้อมระบบเกียร์อัตโนมัติประเภท TZ1) ในความเป็นจริง "ระบบขับเคลื่อนสี่ล้อ" นี้ "ซื่อสัตย์" เช่นเดียวกับ V-Flex หรือ ATC ของ Toyota - ปลั๊กอินเดียวกัน ล้อหลังและหลักการเดียวกันของ TOD (Torque on Demand) ไม่มีส่วนต่างกลาง แต่ ขับหลังเปิดใช้งานโดยคลัตช์ไฮโดรเมคานิกส์ในกรณีถ่ายโอน - มันจะถอยกลับจาก ~10% ของความพยายามภายใต้สภาวะปกติ (หากคุณไม่ได้ถือว่าสิ่งนี้เป็น แรงเสียดทานภายในในการมีเพศสัมพันธ์) ถึงเกือบ 50% ในสถานะขีดจำกัด
แม้ว่าโครงร่าง Subarov จะมีข้อได้เปรียบบางประการในอัลกอริธึมการทำงานเหนือปลั๊กอิน 4WD ประเภทอื่น แม้ว่าจะเล็กน้อย แต่แรงบิดระหว่างการทำงานของ A-AWD (เว้นแต่ระบบจะถูกบังคับให้ปิด) จะยังคงส่งกลับอย่างต่อเนื่อง และไม่เพียงแต่เมื่อล้อหน้าลื่นไถลเท่านั้น แต่ยังมีประโยชน์และมีประสิทธิภาพมากกว่าอีกด้วย ต้องขอบคุณกลศาสตร์อุทกศาสตร์จึงเป็นไปได้ที่จะกระจายแรงใหม่ (แม้ว่าจะดังเกินไปที่จะพูดว่า "กระจายซ้ำ" - เพียงแค่เอาบางส่วนออกไป) แม่นยำกว่าใน ATC ระบบเครื่องกลไฟฟ้า - A-AWD สามารถออกกำลังกายทั้งสองผลัดกันเล็กน้อย และในขณะเร่งความเร็วและเบรกก็จะมีโครงสร้างที่แข็งแกร่งขึ้นด้วย ความน่าจะเป็นที่ "การปรากฏ" ของระบบขับเคลื่อนล้อหลังจะเกิดขึ้นอย่างกะทันหันตามมาด้วย "การหลบหนี" ที่ไม่สามารถควบคุมได้จะลดลง (นี่เป็นอันตรายในรถยนต์ที่มีข้อต่อที่มีความหนืดสำหรับเชื่อมต่อล้อหลัง)
เพื่อปรับปรุงประสิทธิภาพในทุกพื้นที่ Subaru มักจะติดตั้ง ส่วนต่างด้านหลังรุ่นที่มีกลไก A-AWD ล็อคอัตโนมัติ(คัปปลิ้งแบบหนืด “เฟืองลูกเบี้ยว” - ดูรายละเอียดด้านล่าง)
2. วีทีดี เอดับเบิ้ลยูดี


รูปแบบ VTD (การกระจายแรงบิดแบบแปรผัน) ใช้กับรุ่นที่ผลิตน้อยพร้อมระบบเกียร์อัตโนมัติเช่น TV1 (และ TZ102Y ในกรณีของ อิมเพรสซ่า WRX GF8) - ตามกฎแล้วจะทรงพลังที่สุดในช่วง ที่นี่ทุกอย่างเป็นไปตาม "ความซื่อสัตย์" - ระบบขับเคลื่อนสี่ล้อเป็นแบบถาวรอย่างแท้จริงโดยมีเฟืองท้ายตรงกลาง (ล็อคโดยคลัตช์ระบบเครื่องกลไฮโดรเมคานิก) อย่างไรก็ตาม 4WD ของ Toyota ทำงานบนหลักการเดียวกันตั้งแต่กลางทศวรรษที่ 80 บนกระปุกเกียร์ A241H และ A540H แต่ตอนนี้อนิจจามันยังคงอยู่เฉพาะในรุ่นขับเคลื่อนล้อหลังดั้งเดิมเท่านั้น (ขับเคลื่อนสี่ล้อเช่น FullTime-H หรือ ไอ-โฟร์)
โบรชัวร์ VTD ทุกฉบับระบุว่า "แรงบิดจะถูกแบ่งระหว่างด้านหน้าและด้านหลัง" ล้อหลังในอัตราส่วน 45/55" และหลายๆ คนเริ่มเชื่อจริงๆ ว่า พวกเขาขับไปข้างหน้าตามทางหลวงโดยขับเคลื่อนล้อหลัง 55% คุณต้องเข้าใจว่าตัวเลขเหล่านี้เป็นตัวบ่งชี้เชิงนามธรรม เมื่อรถเคลื่อนที่เข้า เป็นเส้นตรงและล้อทุกล้อหมุนด้วยความเร็วเท่ากัน จากนั้นเฟืองท้ายตรงกลางจะไม่ทำงาน และโมเมนต์จะแบ่งครึ่งอย่างชัดเจนระหว่างเพลา 45 และ 55 หมายความว่าอย่างไร อัตราทดเกียร์ในชุดเฟืองดาวเคราะห์ของดิฟเฟอเรนเชียล หากล้อหน้าถูกบังคับให้หยุดโดยสิ้นเชิง ตัวพาเฟืองท้ายก็หยุดเช่นกัน และอัตราทดเกียร์ระหว่างเพลาขับของไดรฟ์ด้านหลังและเพลาอินพุตของกล่องโอนจะเท่ากับ 55/100 นั่นคือ 55% ของแรงบิดที่พัฒนาโดย เครื่องยนต์จะกลับไป (เฟืองท้ายจะทำหน้าที่เป็นโอเวอร์ไดรฟ์) หากล้อหลังค้าง แรงบิด 45% จะเดินหน้าผ่านตัวพาเฟืองท้ายในลักษณะเดียวกัน แน่นอนว่าการมีอยู่ของการบล็อกไม่ได้ถูกนำมาพิจารณาที่นี่ และแท้จริงแล้ว... ในความเป็นจริง การกระจายของช่วงเวลาเป็นมูลค่าที่ลอยอยู่ตลอดเวลาและไม่ได้คลุมเครือ
Subaru มักจะมาพร้อมกับ VTD ที่ค่อนข้างสูง ระบบวีดีซี(Vehicle Dynamic Control) ในความคิดของเรา - ระบบเสถียรภาพของอัตราแลกเปลี่ยน เมื่อเริ่มต้นแล้ว ส่วนประกอบ, ทีซีเอส ( ระบบควบคุมการยึดเกาะถนนระบบ) ชะลอความเร็วล้อที่ลื่นไถลและเร่งเครื่องยนต์เล็กน้อย (ประการแรกโดยจังหวะการจุดระเบิดและประการที่สองแม้จะปิดหัวฉีดบางตัวก็ตาม) ระบบป้องกันภาพสั่นไหวแบบไดนามิกแบบคลาสสิกทำงานขณะขับขี่ ด้วยความสามารถในการเบรกล้อใดๆ โดยพลการ VDC จึงจำลอง (จำลอง) การล็อกเฟืองท้ายแบบไขว้ แน่นอนว่านี่เป็นเรื่องดี แต่คุณไม่ควรพึ่งพาความสามารถของระบบดังกล่าวอย่างจริงจัง - จนถึงขณะนี้ยังไม่มีผู้ผลิตรถยนต์รายใดที่สามารถนำ "การล็อคแบบอิเล็กทรอนิกส์" เข้ามาใกล้กับกลไกแบบเดิมมากขึ้นในแง่ของความน่าเชื่อถือและที่สำคัญที่สุดคือ , ประสิทธิภาพ.
3. "วี-เฟล็กซ์"
คงจะคุ้มค่าที่จะพูดถึง 4WD ซึ่งใช้กับรุ่นเล็กที่มีกระปุกเกียร์ CVT (เช่น Vivio และ Pleo) รูปแบบนี้ง่ายกว่า - ระบบขับเคลื่อนล้อหน้าแบบถาวรและเพลาล้อหลัง "เชื่อมต่อ" ด้วยคัปปลิ้งที่มีความหนืดเมื่อล้อหน้าลื่นไถล
เกี่ยวกับแคมดิฟเฟอเรนเชียล

1 - ตัวคั่น 2 - ลูกเบี้ยวนำทาง
3 - ตลับลูกปืนกันรุน, 4 - ตัวเรือนเฟืองท้าย, 5 - แหวนรอง, 6 - ฮับ
เราได้กล่าวไว้แล้วใน ภาษาอังกฤษเฟืองท้ายแบบล็อคตัวเองทั้งหมดอยู่ภายใต้แนวคิดของ LSD แต่ตามธรรมเนียมของเรา นี่คือสิ่งที่มักเรียกว่าระบบที่มีการคัปปลิ้งแบบหนืด เฟืองท้าย LSD ด้านหลังซึ่งมักใช้กับ Subaru นั้นถูกสร้างขึ้นแตกต่างกัน - เรียกได้ว่า "แรงเสียดทาน, ประเภทลูกเบี้ยว" แทบไม่มีการเชื่อมต่อที่เข้มงวดระหว่างเฟืองขับเฟืองท้ายและเพลาเพลา ความแตกต่างก็คือ ความเร็วเชิงมุมการหมุนนั้นมั่นใจได้โดยการลื่นไถลของเพลาเพลาหนึ่งเมื่อเทียบกับอีกเพลาหนึ่งและ "การปิดกั้น" นั้นมีอยู่ในหลักการทำงานนั่นเอง

ตัวคั่นจะหมุนพร้อมกับเฟืองท้าย "กุญแจ" ที่ติดอยู่กับกรงสามารถเคลื่อนที่ไปในทิศทางตามขวางได้ การยื่นและการกดของลูกเบี้ยว (ขอเรียกมันว่า) ร่วมกับกุญแจเพื่อสร้างการส่งกำลังแบบหมุน เช่นเดียวกับการส่งผ่านแบบโซ่
หากความต้านทานบนล้อเท่ากัน กุญแจจะไม่ลื่นและเพลาทั้งสองจะหมุนด้วยความเร็วเท่ากัน หากความต้านทานบนล้อข้างหนึ่งเพิ่มขึ้นอย่างเห็นได้ชัดปุ่มจะเริ่มเลื่อนไปตามการกดและส่วนที่ยื่นออกมาของลูกเบี้ยวที่เกี่ยวข้องโดยยังคงพยายามหมุนไปในทิศทางการหมุนของตัวแยก ความเร็วในการหมุนของครึ่งหลังไม่เหมือนกับเฟืองท้ายประเภทดาวเคราะห์ (นั่นคือหากล้อหนึ่งอยู่กับที่ ล้อที่สองจะไม่หมุนเร็วเป็นสองเท่าของเฟืองท้าย)
ไม่ว่ารถที่มีดิฟเฟอเรนเชียลจะสามารถ "ขับเคลื่อนด้วยล้อเดียว" ได้หรือไม่นั้นจะขึ้นอยู่กับความสมดุลของกระแสระหว่างความต้านทานบนเพลาเพลา ความเร็วของการหมุนของตัวเรือน ปริมาณแรงที่ส่งกลับ และแรงเสียดทานในกุญแจ -แคมคู่ อย่างไรก็ตาม การออกแบบนี้เห็นได้ชัดว่าไม่ใช่ "ออฟโรด"
ปัจจุบันเปิดอยู่ รถยนต์ปกติมีการใช้ระบบขับเคลื่อนสามประเภท: ขับเคลื่อนล้อหน้า (FWD), ขับเคลื่อนล้อหลัง (RWD) และขับเคลื่อนสี่ล้อ (4WD)
ในช่วงเริ่มต้นของประวัติศาสตร์ Subaru อาศัยระบบขับเคลื่อนสี่ล้อซึ่งในสมัยนั้นใช้สำหรับยานพาหนะพิเศษเท่านั้น ในบทนี้เราจะพูดถึงคุณประโยชน์ของระบบขับเคลื่อนสี่ล้อที่เป็นกรรมสิทธิ์ของ Subaru เพื่อความเข้าใจที่ดีขึ้น ลองพิจารณาอิทธิพลของการขับขี่แต่ละประเภทที่มีต่อคุณภาพไดนามิกของรถ เนื่องจากคุณสมบัติเหล่านี้ส่วนใหญ่ขึ้นอยู่กับคุณสมบัติของยางซึ่งมีหน้าที่รับผิดชอบในการเชื่อมต่อระหว่างรถกับพื้นผิวถนน คุณจึงควรทำความคุ้นเคยกับคุณลักษณะของยางก่อน
นอกเหนือจากการมอบความสะดวกสบายในการขับขี่ด้วยการดูดซับแรงกระแทกจากความไม่สม่ำเสมอของถนนแล้ว ยางยังทำหน้าที่อีก 3 ประการ: ฟังก์ชั่นที่สำคัญ:
เนื่องจากแรงฉุดลากและแรงเบรกไม่สามารถเกิดขึ้นพร้อมกันได้ ในภาพประกอบทางด้านขวา แรงที่กระทำต่อยางจึงแสดงด้วยองค์ประกอบสองส่วน แรงเหล่านี้เป็นแรงพื้นฐานสองแรง ซึ่งขนาดถูกจำกัดโดยคุณสมบัติทั่วไปของยาง ซึ่งหมายความว่าไม่มีความเป็นไปได้ในการควบคุมหากยางหมดคุณสมบัติการเร่งความเร็วสำรองแล้ว
ลองจินตนาการถึงรถที่กำลังเคลื่อนที่เป็นโค้ง ในสถานการณ์เช่นนี้ ยางทั้งสี่เส้นจะพบกับแรงด้านข้างที่ทำให้แรงเหวี่ยงหนีศูนย์ที่เกิดขึ้นเมื่อรถเลี้ยวสมดุล และถึงแม้ว่าจะบังคับได้เฉพาะล้อหน้าเท่านั้น แต่แรงก็กระทำต่อล้อทั้งสี่ของรถ โดยมีแนวโน้มที่จะผลักมันออกไปให้พ้นทางเลี้ยว หากความเร็วของรถยังคงเพิ่มขึ้น แรงที่กระทำต่อยางและวิถีโคจรที่กำหนดจะถึงขีดจำกัด หลังจากนั้นรถจะเบี่ยงเบนไปจากวิถีที่กำหนด ในกรณีนี้ หากยางเส้นหนึ่งโหลดด้วยแรงบิดบวกหรือลบ (เบรก) ยางจะถึงขีดจำกัดการยึดเกาะก่อนยางอีกเส้น ขึ้นอยู่กับประเภทของการขับขี่ (FWD/RWD/4WD) ปรากฏการณ์นี้อาจส่งผลต่อพฤติกรรมของรถไม่ทางใดก็ทางหนึ่ง*
ประสิทธิภาพของยางส่วนใหญ่ขึ้นอยู่กับวัสดุและการออกแบบ รวมถึงสภาพของถนนด้วย นอกจากนี้ ยังได้รับผลกระทบจากการรับน้ำหนักในแนวตั้ง (ยิ่งรับน้ำหนักบนยางมากเท่าใด แรงที่สัมผัสกับถนนก็จะยิ่งมากขึ้นเท่านั้น) ยางสามารถรักษาวิถีที่กำหนดได้ในระหว่างการหมุนเท่านั้น หากล้อล็อคสนิท รถจะไม่สามารถควบคุมได้
- แรงเหวี่ยง
- ปฏิกิริยาด้านข้างของยาง
- แรงยึดเกาะสูงสุด
- แรงดึง
- วิถีที่กำหนด
* ไม่ใช่แค่ประเภทของระบบขับเคลื่อนเท่านั้นที่มีอิทธิพลต่อพฤติกรรมของรถ รถยนต์ส่วนใหญ่ ไม่ว่าจะใช้ระบบขับเคลื่อนประเภทใดก็ตาม ได้รับการออกแบบมาให้ลดความเร็วลงเล็กน้อยบนถนนแห้งปกติเพื่อความปลอดภัย คุณลักษณะด้านพฤติกรรมที่ชัดเจนที่สุดขึ้นอยู่กับประเภทของการขับขี่จะปรากฏในโหมดสุดขั้วหรือบนถนนลื่น
ขับหลัง
ระบบขับเคลื่อนสี่ล้อถาวรของ Subaru – Symmetrical AWD
ข้อดี
- ความเสถียรสูง: การกระจายแรงบิดไปยังล้อทั้งสี่นั้นต้องขอบคุณสิ่งนี้ พฤติกรรมที่ปลอดภัยคงความเสถียรแม้บนพื้นผิวที่ไม่เรียบ
- ความสามารถข้ามประเทศสูง: ความสามารถในการยึดเกาะที่ดีเยี่ยมในทุกสภาวะมั่นใจได้ด้วยการจ่ายแรงบิดให้กับล้อทั้งสี่
- ง่ายต่อการควบคุม: มีแนวโน้มที่จะเอาชนะอาการอันเดอร์สเตียร์หรือโอเวอร์สเตียร์ได้แม้ในสภาวะที่รุนแรง
- ไดนามิกการเร่งความเร็วที่ดี: แรงบิดถูกส่งไปยังล้อทั้งสี่ ทำให้การออกแบบนี้เหมาะสำหรับเครื่องยนต์กำลังสูง
ข้อเสียของระบบขับเคลื่อนสี่ล้อแบบเดิมซึ่งระบบขับเคลื่อนสี่ล้อแบบสมมาตรของ Subaru กำจัดออกไป
- น้ำหนักที่มากขึ้น การสิ้นเปลืองเชื้อเพลิงที่มากขึ้น... ส่วนประกอบของระบบขับเคลื่อนสี่ล้อนั้นเรียบง่ายและมีน้ำหนักเบา เนื่องจากมีการวางเครื่องยนต์และกระปุกเกียร์ตามแนวยาว
- การจัดการปานกลาง... ด้วยข้อได้เปรียบด้านการออกแบบ ระบบขับเคลื่อนสี่ล้อไม่ได้ป้องกันรุ่น Subaru จากการสาธิตการควบคุมที่ประณีต
ขับเคลื่อนล้อหน้า FWD
ข้อดี
- โอกาสที่จะได้รับการตกแต่งภายในที่กว้างขวางยิ่งขึ้นเนื่องจากไม่มี เพลาคาร์ดาน- (แต่จำเป็นต้องมีความแข็งแกร่งของร่างกายเพียงพอ ซึ่งเป็นเหตุผลว่าทำไมรุ่นขับเคลื่อนล้อหน้าหลายรุ่นจึงมีอุโมงค์พื้น)
- ความมั่นคงในทิศทางสูง: เนื่องจากล้อหน้าจะดึงตัวรถอย่างต่อเนื่อง กองกำลังที่ใช้งานอยู่การยึดเกาะของล้อหน้าช่วยเพิ่มเสถียรภาพเมื่อขับขี่ด้วยความเร็วสูง
- ง่ายต่อการควบคุม: รถขับเคลื่อนล้อหน้ามีแนวโน้มที่จะเกิดอาการ understere ในสภาวะที่รุนแรง เมื่อปล่อยแป้นคันเร่งและแรงฉุดลากลดลง ความไวในการควบคุมจะกลับคืนสู่วิถีที่กำหนด
- ประสิทธิภาพการใช้เชื้อเพลิงที่ดีเยี่ยม: การออกแบบขับเคลื่อนล้อหน้าให้การส่งแรงบิดที่สั้นและมีประสิทธิภาพในการทำงานสูง
ข้อบกพร่อง
- การตอบสนองของพวงมาลัยไม่ดี: เนื่องจากทั้งการยึดเกาะและการบังคับเลี้ยวของรถจะดำเนินการโดยล้อหน้าเท่านั้น ในสภาวะการขับขี่ที่รุนแรง การตอบสนองของพวงมาลัยจะแม่นยำน้อยลงและมีแนวโน้มที่จะเกิดอันเดอร์สเตียร์
- เมื่อเร่งรถอย่างแรง เครื่องยนต์ทรงพลังน้ำหนักบรรทุกจะถูกกระจายไปยังล้อหลัง ซึ่งเป็นสาเหตุที่ยางหน้าไม่สามารถรับรู้ถึงความสามารถได้อย่างเต็มที่ ระบบขับเคลื่อนล้อหน้าไม่เหมาะกับรถยนต์ที่มีเครื่องยนต์ทรงพลัง
อันเดอร์สเตียร์
- แรงเหวี่ยง
- ปฏิกิริยาด้านข้างของยาง
- แรงยึดเกาะสูงสุด
- แรงดึง
- วิถีที่กำหนด
ขับเคลื่อนล้อหลัง RWD
ข้อดี
- การควบคุมที่เฉียบคม: ล้อหน้าทำหน้าที่บังคับเลี้ยวเท่านั้น ตำแหน่งด้านหน้าเครื่องยนต์และระบบขับเคลื่อนล้อหลังทำให้รถมีการกระจายน้ำหนักเหนือล้อได้ดี
- รัศมีวงเลี้ยวแคบลง: การไม่มีระบบขับเคลื่อนล้อหน้าทำให้ได้มุมเลี้ยวที่ใหญ่ขึ้น
- การโอเวอร์คล็อกที่ดีบนถนนแห้ง: ในระหว่างการเร่งความเร็ว มวลจะถูกกระจายไปยังล้อหลัง ซึ่งช่วยให้รับแรงฉุดลากได้มากขึ้น
ข้อบกพร่อง
- ห้องโดยสารและความจุกระโปรงหลังน้อยลง: ขับเคลื่อนล้อหลังเทอะทะ ( เพลาคาร์ดาน, เกียร์หลัก) อยู่ใต้ท้องรถ
- น้ำหนักลดที่มากขึ้น: รถยนต์ขับเคลื่อนล้อหลังมีส่วนประกอบและส่วนประกอบมากกว่าเมื่อเทียบกับรถยนต์ขับเคลื่อนล้อหน้า
- ในสภาวะที่รุนแรง รถเหล่านี้มีแนวโน้มที่จะโอเวอร์สเตียร์ ซึ่งทำให้ขับได้ยากกว่ารถขับเคลื่อนล้อหน้า
สำหรับรุ่นสปอร์ต นี่เป็นข้อดีมากกว่าข้อเสีย เนื่องจากเป็นการเพิ่มความตื่นเต้น
โอเวอร์สเตียร์
- แรงเหวี่ยง
- ปฏิกิริยาด้านข้างของยาง
- แรงยึดเกาะสูงสุด
- แรงดึง
- วิถีที่กำหนด
ขับเคลื่อน 4 ล้อทุกล้อ
ข้อดี
- ความเสถียรสูง: แรงบิดถูกส่งไปยังล้อทั้งสี่ ทำให้มั่นใจในพฤติกรรมการขับขี่ที่ปลอดภัยแม้บนพื้นผิวที่ไม่เรียบ
- ความสามารถข้ามประเทศสูง: ความเป็นไปได้ในการตระหนักถึงการยึดเกาะนั้นกว้างกว่าการใช้ระบบขับเคลื่อนเดี่ยวมาก
- ง่ายต่อการควบคุม: รถขับเคลื่อนสี่ล้อจะมีความเอนเดอร์สเตียร์และใกล้กับเกียร์ว่างมากขึ้น
- ไดนามิกการเร่งความเร็วที่ดี: แรงบิดถูกส่งไปยังล้อทั้งสี่ดังนั้นระบบขับเคลื่อนสี่ล้อจึงเข้ากันได้ดีมากกับเครื่องยนต์กำลังสูง
ข้อบกพร่อง
- ความจุห้องโดยสารและท้ายรถน้อยลง: ระบบขับเคลื่อนขนาดใหญ่ของล้อหน้าและล้อหลัง (เพลาขับและเกียร์หลักอยู่ใต้ส่วนล่างของตัวถัง)
- น้ำหนักที่ลดลงมากเนื่องจากมีชิ้นส่วน ส่วนประกอบ และชุดประกอบจำนวนมาก
- ปริมาณการใช้เชื้อเพลิงเพิ่มขึ้นเนื่องจากน้ำหนักที่มากขึ้นและมีชิ้นส่วนที่หมุนเพิ่มเติม
- การตอบสนองต่อการควบคุมแย่ลงเนื่องจากการหมุนเวียนของกำลัง และเนื่องจากการที่ล้อที่บังคับเลี้ยวนั้นเต็มไปด้วยแรงบิดเหมือนกับล้อขับเคลื่อน
พวงมาลัยใกล้กับเกียร์ว่าง
- แรงเหวี่ยง
- ปฏิกิริยาด้านข้างของยาง
- แรงยึดเกาะสูงสุด
- แรงดึง
- วิถีที่กำหนด
ความปลอดภัย
ด้ามจับที่เชื่อถือได้
ความแตกต่างที่สำคัญของระบบขับเคลื่อนแบบสมมาตรคือความยาวเท่ากันของเพลาเพลาด้านขวาและด้านซ้าย ซึ่งทำให้ง่ายต่อการให้ระยะระบบกันสะเทือนที่เพียงพอพร้อมการติดตามโปรไฟล์ถนนที่ชัดเจน เป็นผลให้รถ "ยึด" ถนนได้อย่างน่าเชื่อถือล้อดูเหมือนจะเกาะติดกับพื้นผิว
ความมั่นคงสูง
ดังที่ได้กล่าวไปแล้วการรวมกัน เครื่องยนต์บ็อกเซอร์ Subaru และระบบขับเคลื่อนแบบสมมาตรให้เสถียรภาพและการควบคุมที่ยอดเยี่ยม ระบบขับเคลื่อนสี่ล้อรับประกันความได้เปรียบเพิ่มเติมเหนือคู่แข่งเมื่อขับขี่ออฟโรด
ขับขี่อย่างเพลิดเพลิน
ประหยัด
ตามกฎแล้ว รถขับเคลื่อนสี่ล้อจะหนักกว่าและมีการควบคุมที่แย่กว่า ซึ่งท้ายที่สุดจะนำไปสู่ การบริโภคที่เพิ่มขึ้นเชื้อเพลิง. เนื่องจากข้อได้เปรียบด้านการออกแบบ ระบบขับเคลื่อนสี่ล้อแบบสมมาตรจึงไม่จำเป็นต้องมีส่วนประกอบที่ไม่จำเป็น Subaru บางรุ่นมีอัตราสิ้นเปลืองเชื้อเพลิงเทียบได้กับรุ่นขับเคลื่อนล้อเดียวในคลาสเดียวกันจากผู้ผลิตรายอื่น
การจัดการที่ประณีต
ต้องขอบคุณเครื่องยนต์บ็อกเซอร์ที่ติดตั้งตามยาวและ ไดรฟ์แบบสมมาตรรถยนต์ซูบารุมีการควบคุมที่ประณีต มีความสามารถข้ามประเทศของรุ่นขับเคลื่อนสี่ล้อและในแง่ของความเร็วในการตอบสนองนั้นเหนือกว่ารุ่นขับเคลื่อนล้อเดียวทั่วไป
ความมั่นคงและการยึดเกาะ
ประสิทธิภาพของระบบขับเคลื่อนสี่ล้อขึ้นอยู่กับแนวคิดของรถ ยิ่งการกระจายแรงบิดบนล้อมีความกระฉับกระเฉงมากเท่าใด ความสามารถในการข้ามประเทศก็จะยิ่งสูงขึ้นเท่านั้น แม้ว่าส่วนใหญ่มักจะต้องสูญเสียความสามารถในการควบคุมก็ตาม
ในรุ่น Subaru ด้วยการตอบสนองและประสิทธิภาพสูงของระบบขับเคลื่อนสี่ล้อ แรงบิดสามารถกระจายไปทั่วล้อได้อย่างแข็งขัน โดยรักษาเสถียรภาพที่ดีและ ความสามารถข้ามประเทศสูงบน ประเภทต่างๆถนนโดยไม่เกิดความเสียหาย ประสิทธิภาพการใช้เชื้อเพลิงและความสามารถในการควบคุม
เป็นเรื่องง่ายที่จะเห็นความแตกต่างระหว่างรถขับเคลื่อนสี่ล้อรุ่นขับเคลื่อนล้อเดียวและรถยนต์ Subaru ที่มีการจัดวางในอุดมคติซึ่งสร้างขึ้นตั้งแต่ต้นจนจบ
รถขับเคลื่อนสี่ล้อที่มีเฟืองท้ายอิสระจะหยุดทำงานเมื่อล้อใดล้อหนึ่งลื่นไถล เพื่อหลีกเลี่ยงปัญหานี้ จึงมีการใช้กลไกการล็อค
อย่างไรก็ตามการทำงานของกลไกดังกล่าวอาจส่งผลเสียต่อการขับขี่ได้ ดังนั้นเมื่อขับบนยางมะตอยแห้งโดยมีเฟืองท้ายล็อคอยู่ การหมุนเวียนของกำลังจะเกิดขึ้น ทำให้เกิดการกระตุกและทำให้เลี้ยวได้ยาก ดังนั้นบนถนนที่แห้ง จำเป็นต้องปลดล็อคเฟืองท้าย และในบริเวณที่ยากลำบากที่มีการยึดเกาะต่ำ จะต้องล็อคไว้ ระบบขับเคลื่อนสี่ล้อแบบถาวรสามารถล็อคและปลดล็อคเฟืองท้ายได้โดยอัตโนมัติขึ้นอยู่กับสภาพการขับขี่
วิธีแก้ปัญหานี้จำเป็นเพื่อป้องกันการกระตุกเมื่อเปิดล็อค นอกจากนี้ จำเป็นต้องมีการควบคุมขั้นสูงเพิ่มเติมตามเงื่อนไข การเปลี่ยนแปลงอย่างกะทันหัน สภาพถนน- นั่นคือเมื่อประสบการณ์และความรู้ด้านเทคนิคในการใช้งานระบบขับเคลื่อนสี่ล้อทำให้เกิดความแตกต่างได้อย่างแท้จริง!
ส่วนต่างกลาง
ปลดล็อคเฟืองท้ายตรงกลางแล้ว
ล็อคเฟืองท้ายตรงกลาง
- แรงดึงศักย์ที่ส่งผ่านล้อ
- แรงดึงที่ใช้กับการสูญเสียภายใน
- แรงดึงจริงที่ส่งผ่านล้อ
ความสามารถในการควบคุม
ระบบเฟืองท้ายแอคทีฟเซ็นเตอร์หลายโหมด
โหมดแมนนวลแบบหลายขั้นตอนและสามแบบ โหมดอัตโนมัติระบบควบคุม DCCD ช่วยให้สามารถเลือกล็อคเฟืองท้ายตรงกลางได้หนึ่งในสองประเภท ซึ่งให้สมดุลที่สมบูรณ์แบบของการยึดเกาะถนนและความคล่องตัวที่ยอดเยี่ยมบนทุกพื้นผิวถนน สัดส่วนพื้นฐานของการกระจายแรงบิดระหว่างล้อหน้าและล้อหลังคือ 41% / 59% มั่นใจในการกระจายแรงบิดโดยการควบคุมดิสก์หลายแผ่น ข้อต่อแม่เหล็กไฟฟ้าการส่งแรงบิดและเฟืองท้ายแบบล็อคตัวเองทางกล
ระบบป้องกันภาพสั่นไหวแบบไดนามิกหลายโหมด
พลศาสตร์ของยานพาหนะ ระบบควบคุม
รวมอยู่ใน อุปกรณ์มาตรฐานจากการดัดแปลงรถยนต์ซูบารุทั้งหมด ระบบรักษาเสถียรภาพแบบไดนามิกจะตรวจสอบพฤติกรรมของรถตามความตั้งใจของผู้ขับขี่ผ่านสัญญาณจากเซ็นเซอร์จำนวนมาก หากรถเข้าใกล้การสูญเสียเสถียรภาพ ระบบกระจายแรงบิด เครื่องยนต์ และเบรกที่แต่ละล้อจะถูกปรับเพื่อรักษาวิถีการเคลื่อนที่ของรถ
ความมั่นคงในระหว่างการซ้อมรบ
เมื่อเลี้ยวหรือหลบหลีกสิ่งกีดขวางอย่างกะทันหัน ระบบควบคุมเสถียรภาพการทรงตัวแบบไดนามิกจะเปรียบเทียบความตั้งใจของผู้ขับขี่กับพฤติกรรมที่แท้จริงของรถ การเปรียบเทียบนี้จัดทำขึ้นโดยอาศัยสัญญาณจากเซ็นเซอร์มุมบังคับเลี้ยว เซ็นเซอร์แป้นเบรก รวมถึงเซ็นเซอร์เร่งความเร็วด้านข้างและเซ็นเซอร์อัตราการหันเห
จากนั้นระบบจะปรับกำลังเครื่องยนต์และการตั้งค่าเบรกที่แต่ละล้อตามความจำเป็นเพื่อให้รถอยู่ในเส้นทางที่ต้องการ
ระบบขับเคลื่อนสี่ล้อแบบสมมาตรของ Subaru
ระบบขับเคลื่อนสี่ล้อ VTD *1:
รุ่นกีฬาขับเคลื่อนสี่ล้อด้วย ควบคุมด้วยระบบอิเล็กทรอนิกส์ปรับปรุงลักษณะการกลึง ระบบขับเคลื่อนสี่ล้อขนาดกะทัดรัดประกอบด้วยเฟืองดาวเคราะห์ที่อยู่ตรงกลางและคลัตช์ล็อคอัพไฮดรอลิกแบบหลายแผ่นควบคุมด้วยระบบอิเล็กทรอนิกส์ *2 การกระจายแรงบิด 45:55 ระหว่างล้อหน้าและล้อหลังถูกปรับอย่างต่อเนื่องด้วยระบบล็อคเฟืองท้ายโดยใช้คลัตช์หลายแผ่น การกระจายแรงบิดจะถูกควบคุมโดยอัตโนมัติโดยคำนึงถึงสภาวะ ผิวถนน- สิ่งนี้ให้ความเสถียรที่ยอดเยี่ยม และเนื่องจากการกระจายแรงบิดโดยเน้นที่ล้อหลัง ลักษณะการบังคับเลี้ยวจึงได้รับการปรับปรุงให้ดีขึ้น
Subaru WRX พร้อมระบบเกียร์ Lineartronic
ติดตั้งก่อนหน้านี้ในรถยนต์: Subaru Legacy GT 2010-2013, Forester S-Edition 2011-2013, Outback 3.6 2010-2014, Tribeca, WRX STI พร้อม เกียร์อัตโนมัติ 2011-2012
ระบบขับเคลื่อนสี่ล้อพร้อม Active Torque Vectoring (ACT):
ระบบขับเคลื่อนสี่ล้อที่ควบคุมด้วยระบบอิเล็กทรอนิกส์ช่วยให้รถมีทิศทางที่มีเสถียรภาพมากขึ้น เมื่อเทียบกับรถขับเคลื่อนล้อเดียวและรถขับเคลื่อนสี่ล้อที่มีระบบขับเคลื่อนแบบเสียบปลั๊กไปยังเพลาอื่น
คลัตช์แรงบิดหลายแผ่นแท้ของซูบารุจะปรับการกระจายแรงบิดระหว่างล้อหน้าและล้อหลังแบบเรียลไทม์เพื่อให้เหมาะกับสภาพการขับขี่ อัลกอริธึมการควบคุมถูกฝังอยู่ หน่วยอิเล็กทรอนิกส์ควบคุมการส่งกำลังและคำนึงถึงความเร็วในการหมุนของล้อหน้าและล้อหลัง, แรงบิดปัจจุบันที่ เพลาข้อเหวี่ยงเครื่องยนต์ อัตราทดเกียร์ปัจจุบัน มุมพวงมาลัย ฯลฯ และด้วยความช่วยเหลือของชุดไฮดรอลิกจะบีบอัดแผ่นคลัตช์ด้วยแรงที่จำเป็น ภายใต้สภาวะที่เหมาะสม ระบบจะกระจายแรงบิดระหว่างล้อหน้าและล้อหลังในอัตราส่วน 60:40 ขึ้นอยู่กับสถานการณ์ เช่น การลื่นไถล การเลี้ยวหักศอก ฯลฯ การกระจายแรงบิดระหว่างเพลาจะเปลี่ยนไป การปรับอัลกอริธึมการควบคุมให้เข้ากับสภาพการขับขี่ในปัจจุบันทำให้มั่นใจได้ถึงการควบคุมที่ยอดเยี่ยมในทุกสถานการณ์ สถานการณ์การจราจรโดยไม่คำนึงถึงระดับการฝึกอบรมของผู้ขับขี่ คลัตช์หลายแผ่นอยู่ในตัวเรือน หน่วยพลังงานเป็นของเขา ส่วนสำคัญและใช้เหมือนกัน ของไหลทำงานเช่นเดียวกับองค์ประกอบอื่นๆ ของเกียร์อัตโนมัติ ซึ่งเป็นตัวกำหนด ระบายความร้อนได้ดีขึ้นแทนที่จะแยกสถานที่เช่นเดียวกับผู้ผลิตส่วนใหญ่ จึงมีความทนทานมากกว่า
รุ่นปัจจุบัน (สเปครัสเซีย)
ในภาษารัสเซีย ตลาดซูบารุชนบทห่างไกล, ซูบารุเลกาซี, Subaru Forester *, Subaru XV
* สำหรับการปรับเปลี่ยนเกียร์แบบ Lineartronic
ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายลิมิเต็ดสลิปตรงกลางพร้อมคัปปลิ้งหนืด (CDG):
ระบบเครื่องกลระบบขับเคลื่อนสี่ล้อสำหรับเกียร์ธรรมดา ระบบนี้เป็นการผสมผสานระหว่างเฟืองท้ายตรงกลางกับเฟืองดอกจอกและระบบล็อคแบบคัปปลิ้งที่มีความหนืด ภายใต้สภาวะปกติ แรงบิดจะกระจายระหว่างล้อหน้าและล้อหลังในอัตราส่วน 50:50 ระบบให้ความปลอดภัย การขับขี่แบบสปอร์ตและใช้แรงฉุดลากที่มีอยู่ให้เกิดประโยชน์สูงสุดอยู่เสมอ
รุ่นปัจจุบัน (สเปครัสเซีย)
Subaru WRX และ Subaru Forester - พร้อมด้วย เกียร์ธรรมดา.
ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายแอคทีฟควบคุมด้วยระบบอิเล็กทรอนิกส์ (DCCD *3):
ระบบขับเคลื่อนสี่ล้อเน้นมอบสมรรถนะการขับขี่สูงสุดสำหรับการแข่งขันกีฬาที่จริงจัง ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายแบบแอคทีฟลิมิเต็ดสลิปควบคุมด้วยระบบอิเล็กทรอนิกส์ ใช้การผสมผสานระหว่างระบบล็อคเฟืองท้ายแบบกลไกและแบบอิเล็กทรอนิกส์เพื่อตอบสนองต่อการเปลี่ยนแปลงของแรงบิด การกระจายแรงบิดระหว่างล้อหน้าและล้อหลังอยู่ที่ 41:59 โดยเน้นที่ประสิทธิภาพสูงสุดและการควบคุมรถที่เหมาะสมที่สุด เสถียรภาพแบบไดนามิกรถ. การล็อคแบบกลไกมีการตอบสนองที่เร็วขึ้นและทำงานก่อนการล็อคแบบอิเล็กทรอนิกส์ เมื่อทำงานด้วยแรงบิดสูง ระบบจะแสดงให้เห็นถึงความสมดุลที่ดีที่สุดระหว่างการควบคุมความเฉียบแหลมและเสถียรภาพ มีโหมดควบคุมการล็อกเฟืองท้ายที่ตั้งไว้ล่วงหน้า เช่นเดียวกับ ควบคุมด้วยมือซึ่งผู้ขับขี่สามารถใช้งานได้ตามสภาพการจราจร
รุ่นปัจจุบัน (สเปครัสเซีย)
Subaru WRX STI พร้อมเกียร์ธรรมดา
*1 VTD: การกระจายแรงบิดแบบแปรผัน
*2 เฟืองท้ายลิมิเต็ดสลิปแบบควบคุม
*3 DCCD: ส่วนต่างกลางแบบแอคทีฟ
ในช่วงเริ่มต้นของประวัติศาสตร์ Subaru อาศัยรุ่นขับเคลื่อนสี่ล้อซึ่งเป็นเทคโนโลยีที่มีอยู่ในเวลานั้นเป็นหลัก ยานพาหนะพิเศษ- ในปี 1972 Subaru เปิดตัวครั้งแรก รุ่นขับเคลื่อนสี่ล้อ Leone Estate Van 4WD และตั้งแต่นั้นมายอดขายของบริษัทมากกว่าครึ่งหนึ่งก็เป็นรถ 4WD สิ่งสำคัญคือระบบขับเคลื่อนสี่ล้อแบบสมมาตรของ Subaru ไม่ได้ถูกปรับให้เข้ากับรถยนต์ที่มีระบบขับเคลื่อนแบบเพลาเดียว แต่ถูกสร้างขึ้นเพื่อใช้กับรถยนต์ที่มีล้อขับเคลื่อนสี่ล้อทันที ในส่วนของระบบขับเคลื่อนสี่ล้อ Subaru Symmetrical All Wheel Drive ที่มีเพลาเพลาที่มีความยาวเท่ากันประกอบกับระบบขับเคลื่อนสี่ล้อที่ตรงกันข้ามตามยาว เครื่องยนต์ซูบารุบ็อกเซอร์และระบบส่งกำลังถูกเปลี่ยนภายในฐานล้อ การจัดเรียงนี้ช่วยให้นอกจากจะกระจายน้ำหนักได้ใกล้เคียงอุดมคติตามเพลาแล้ว ยังรับประกันการใช้กำลังของเครื่องยนต์อย่างมีประสิทธิภาพและความสมดุลที่ดีของการยึดเกาะของล้อบนพื้นผิวทุกประเภท นั่นคือการกระจายแรงบิดที่เหมาะสมที่สุดระหว่างล้อทุกล้อและด้วยเหตุนี้ ระดับสูงความสามารถในการควบคุม
แรงบิดถูกกระจายอย่างเหมาะสมไปยังทุกล้อ ส่งผลให้พวงมาลัยเข้าใกล้เกียร์ว่าง

ระบบขับเคลื่อนสี่ล้อแบบสมมาตรช่วยลดการเคลื่อนตัวของเพลาหน้าและการลื่นไถลของเพลาหน้าได้อย่างมั่นใจ
ระบบขับเคลื่อนสี่ล้อ Symmetrical AWD มีทั้งหมดสี่ประเภท รายการแรก VTD เปิดอยู่วันนี้ ตลาดรัสเซียไม่ได้แสดง แต่ก่อนหน้านี้เคยใช้กับ 2010-2013 Legacy GT, 2010 Forester S-Edition, 2010-2014 3.6L Outback, Tribeca, WRX และ 2011-212 WRX STI ระบบนี้ใช้ส่วนต่างของศูนย์กลางแบบดาวเคราะห์ซึ่งถูกล็อคด้วยแผ่นดิสก์หลายแผ่น ข้อต่อไฮดรอลิกด้วยการควบคุมแบบอิเล็กทรอนิกส์
การกระจายแรงบิดแบบเดิมที่ 45:55 ได้รับการตรวจสอบอย่างต่อเนื่องโดยระบบควบคุมไดนามิกของยานพาหนะ และการเปลี่ยนแปลงโดยอัตโนมัติขึ้นอยู่กับพื้นผิวถนน โปรไฟล์ และภูมิประเทศ ระบบที่สองคือ ACT พร้อมการกระจายแรงบิดแบบแอคทีฟ ในกรณีนี้ โดยใช้คลัตช์ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์หลายแผ่น แรงบิดจะถูกส่งไปที่ล้อหน้าและล้อหลังในอัตราส่วน 60:40 แบบเรียลไทม์ โดยขึ้นอยู่กับสภาพถนน ในตลาดรัสเซียที่มีระบบขับเคลื่อนสี่ล้อประเภทนี้จะถูกนำเสนอ รุ่นฟอเรสเตอร์, Outback และ XV พร้อมระบบเกียร์ Lineatronic
สำหรับเกียร์ธรรมดานั้นได้รับการออกแบบระบบขับเคลื่อนสี่ล้อ CDG พร้อมเฟืองท้ายแบบล็อคตัวเอง การออกแบบใช้เฟืองท้ายแบบเฟืองดอกจอก ล็อคด้วยคัปปลิ้งแบบหนืด นอกจากนี้ ภายใต้สภาวะการขับขี่ปกติ การกระจายแรงฉุดลากระหว่างล้อหน้าและล้อหลังจะเกิดขึ้นในอัตราส่วน 50:50 ระบบนี้เหมาะอย่างยิ่งสำหรับการขับขี่แบบสปอร์ตดังนั้นจึงไม่น่าแปลกใจที่ก่อนหน้านี้เคยใช้กับรุ่น WRX ที่มีเกียร์ธรรมดาและในปัจจุบันมีการนำเสนอรุ่น Forester และ XV ที่มีเกียร์ธรรมดาในตลาดรัสเซีย Subaru - DCCD ระบบขับเคลื่อนสี่ล้อประเภทที่สี่มีระบบควบคุมเฟืองท้ายลิมิเต็ดสลิปแบบแอคทีฟที่ควบคุมด้วยระบบอิเล็กทรอนิกส์และมุ่งเป้าไปที่ผู้ชื่นชอบการขับขี่แบบสปอร์ตผู้ชื่นชอบแบรนด์ Subaru สำหรับรถยนต์ที่มีตัวละครแบบรถแข่ง
ด้วยไดรฟ์ประเภทนี้ที่เรานำเสนอ Subaru WRX STI การออกแบบนี้เป็นการผสมผสานของระบบล็อคเฟืองท้ายแบบอิเล็กทรอนิกส์และกลไกที่ตอบสนองต่อการเปลี่ยนแปลงของแรงบิด ขั้นแรก ให้เปิดใช้งานการล็อคแบบกลไกที่เร็วขึ้น จากนั้นจึงเปิดใช้งานการล็อคแบบอิเล็กทรอนิกส์ แรงบิดจะถูกกระจายระหว่างล้อหน้าและล้อหลังในอัตราส่วน 41:59 และการทำงานของระบบทั้งหมดมุ่งเน้นไปที่การใช้คุณลักษณะการขับขี่สูงสุดให้เกิดประโยชน์สูงสุด การออกแบบส่วนต่างทำให้มีความเป็นไปได้ในการ "โหลดล่วงหน้า" นั่นคือโหมดสำหรับการตั้งค่าคุณลักษณะล่วงหน้า ด้วยการส่งแรงบิดสูงอย่างรวดเร็ว ระบบนี้จึงให้ความสมดุลที่ดีระหว่างการควบคุมที่เฉียบคมและแม่นยำกับเสถียรภาพของรถ แน่นอนว่าไดรฟ์ประเภทนี้ยังมีโหมดควบคุมเกียร์ธรรมดาด้วย

จุดศูนย์ถ่วงต่ำของเครื่องยนต์บ็อกเซอร์ขนาดกะทัดรัด ระบบขับเคลื่อนสี่ล้อแบบสมมาตรพร้อมระบบขับเคลื่อนที่มีความยาวเท่ากันและระบบส่งกำลังแบบแปรผัน... ทั้งหมดนี้รับประกันการควบคุมที่ดีเยี่ยมบนพื้นผิวทุกประเภท
โดยสรุปแล้ว มีสมมติฐานบางประการที่รู้จักกันดีเกี่ยวกับข้อดีของระบบขับเคลื่อนสี่ล้อ ในกรณีนี้คือ Subaru Symmetrical AWD เนื่องจากการกระจายแรงบิดไปยังล้อทั้งสี่ ทำให้รถแสดงพฤติกรรมที่มั่นคงทั้งในการเลี้ยวโค้งบนพื้นผิวยางมะตอยและเมื่อขับขี่บนถนนที่มีพื้นผิวไม่เรียบ ข้อดีของรถขับเคลื่อนสี่ล้อจะสังเกตได้ชัดเจนเป็นพิเศษเมื่อขับไปตามทาง ถนนในฤดูหนาว- ประการที่สอง รถขับเคลื่อนสี่ล้อมีแนวโน้มที่จะมีระบบบังคับเลี้ยวที่เป็นกลางมากกว่ารถขับเคลื่อนล้อเดียว ดังนั้นผู้ขับจึงมีโอกาสน้อยมากที่จะพลาดโค้ง และแน่นอนว่าตามกฎแล้วรถขับเคลื่อนสี่ล้อนั้นมีไดนามิกการเร่งความเร็วที่ดี: แรงบิดที่ส่งไปยังล้อทั้งสี่ทำให้สามารถรับรู้ถึงความสามารถของเครื่องยนต์กำลังสูงได้ดียิ่งขึ้น

แม้ว่าระบบขับเคลื่อนสี่ล้อทั้งหมดของรถยนต์ Subaru จะมีชื่อและชื่อเหมือนกัน แต่ปัจจุบันมีการใช้งานระบบขับเคลื่อนสี่ล้อ Subaru AWD ที่แตกต่างกันหลายเวอร์ชัน
Subaru ทุกรุ่น ยกเว้น Subaru BRZ coupe ขับเคลื่อนล้อหลัง ได้รับการติดตั้งระบบขับเคลื่อนสี่ล้อแบบสมมาตร Subaru AWD มาตรฐาน แม้จะมีชื่อสามัญ แต่ก็ยังมีระบบขับเคลื่อนสี่ล้อที่แตกต่างกันอย่างน้อยสี่ระบบที่ใช้อยู่ในปัจจุบัน
ระบบขับเคลื่อนสี่ล้อมาตรฐานที่ใช้เฟืองท้ายแบบล็อคตัวเองตรงกลางและคัปปลิ้งแบบหนืด (ซีดีจี)
นี่คือระบบที่คนส่วนใหญ่เชื่อมโยงกับระบบขับเคลื่อนสี่ล้อ พบได้ในรถยนต์ Subaru ส่วนใหญ่ที่มีระบบเกียร์ธรรมดา เป็นระบบขับเคลื่อนสี่ล้อที่สมมาตรมากที่สุด โดยมีการแบ่งแรงบิดระหว่างด้านหน้าและด้านหลังในสภาพการขับขี่ปกติ เพลาล้อหลัง 50:50.

รถยนต์ Subaru เช่น Subaru WRX 2011 ที่มีเกียร์ธรรมดามีระบบขับเคลื่อนสี่ล้อโดยใช้เฟืองท้ายแบบล็อคตัวเองตรงกลางและข้อต่อแบบหนืด
เมื่อตรวจพบการลื่นไถลของล้อหน้าหรือหลัง เฟืองท้ายตรงกลางสามารถส่งแรงบิดได้มากถึง 80 เปอร์เซ็นต์ของแรงบิดไปยังเพลาที่มีการยึดเกาะที่ดีที่สุด ส่วนต่างตรงกลางใช้คัปปลิ้งแบบหนืดที่ทำงานโดยไม่ได้รับความช่วยเหลือ การควบคุมคอมพิวเตอร์และตอบสนองต่อความแตกต่างทางกลไกในการยึดเกาะของล้อ
ระบบ AWD ประเภทนี้มีมานานแล้ว และการปรากฏบน Subaru WRX ปี 2015 หมายความว่ามันอาจจะไม่ไปไหนในเร็วๆ นี้ อันนี้ง่าย ระบบที่เชื่อถือได้เป็น ม้านั่งทำงานระบบขับเคลื่อนสี่ล้อของซูบารุ ระบบนี้ช่วยให้มั่นใจในการขับขี่ที่ปลอดภัยและสปอร์ต โดยใช้ประโยชน์จากการยึดเกาะถนนที่มีอยู่ให้เกิดประโยชน์สูงสุดอยู่เสมอ
ระบบขับเคลื่อนสี่ล้อที่ใช้เฟืองท้ายแบบล็อคตัวเองตรงกลางและการเชื่อมต่อแบบหนืดสามารถพบได้ในการกำหนดค่า Subaru Impreza 2014 2.0i บน XV Crosstrek 2014 พร้อมเกียร์ธรรมดา 5 สปีด; บน ซูบารุ เอาท์แบ็ค 2014 Subaru Forester พร้อมเกียร์ธรรมดา 6 สปีด และ 2015 WRX พร้อมเกียร์ธรรมดา 6 สปีด
ระบบขับเคลื่อนสี่ล้อด้วยการกระจายแรงบิดแบบแปรผันสำหรับรถยนต์เกียร์อัตโนมัติ (VTD)
เมื่อเร็วๆ นี้ ซูบารุเริ่มเปลี่ยนรถยนต์ส่วนใหญ่จากระบบเกียร์อัตโนมัติแปลงแรงบิดมาตรฐานไปเป็นระบบเกียร์แปรผันอย่างต่อเนื่อง (CVT)

Legacy, Outback และ Tribeca พร้อมเครื่องยนต์ 3.6 ลิตรอันทรงพลังใช้ระบบกระจายแรงบิดแบบแปรผันของรถ
แต่ยังมีรถยนต์ที่ใช้ระบบนี้อยู่
รุ่นของระบบขับเคลื่อนสี่ล้อแบบสมมาตรที่ใช้การกระจายแรงบิดแบบแปรผัน (VTD) ใช้กับ Legacy, Outback, Tribeca พร้อมเครื่องยนต์หกสูบขนาด 3.6 ลิตรและห้าสปีด เกียร์อัตโนมัติการแพร่เชื้อ ในกรณีนี้ การกระจายแรงบิดเริ่มต้นคือ 45:55 โดยเลื่อนไปทางเพลาล้อหลัง และแทนที่จะใช้เฟืองท้ายแบบศูนย์กลางที่มีคัปปลิ้งแบบหนืด คลัตช์ไฮดรอลิกหลายแผ่นจะถูกนำมาใช้ร่วมกับเฟืองท้ายแบบเพลากลางแบบดาวเคราะห์
เมื่อตรวจพบการลื่นไถล ตำแหน่งจะขึ้นอยู่กับสัญญาณที่ได้รับจากเซ็นเซอร์ที่ตรวจวัดการลื่นของล้อ วาล์วปีกผีเสื้อและ แรงเบรกคลัตช์ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์สามารถล็อคการแบ่งแรงบิด 50:50 ระหว่างเพลาหน้าและเพลาหลังที่ต้องการการยึดเกาะสูงสุด
แม้ว่าระบบจับยึดแบบหนืดทางกลล้วนๆ จะเรียบง่ายกว่าและอาจยืดหยุ่นมากกว่า แต่ระบบ VTD ที่ควบคุมด้วยระบบอิเล็กทรอนิกส์มีข้อดีคือเป็นแบบแอคทีฟมากกว่าแบบรีแอคทีฟ โดยจะเคลื่อนแรงบิดระหว่างเพลาได้เร็วกว่าระบบทางกลจะสามารถทำได้
ระบบขับเคลื่อนสี่ล้อพร้อม Active Torque Vectoring (ACT)

ด้วยการเปลี่ยนไปใช้ CVT รุ่น Subaru เช่น XV Crosstrek ก็เปลี่ยนมาใช้ระบบ AWD เช่นกัน ไดรฟ์ AWDโดยมีค่าชดเชยเล็กน้อยไปทางเพลาหน้า
Subs รุ่นใหม่ที่ติดตั้งระบบ CVT ตอนนี้ใช้ระบบขับเคลื่อนสี่ล้อ (AWD) เวอร์ชันที่สาม ระบบขับเคลื่อนสี่ล้อนี้คล้ายคลึงกับระบบ VTD ที่อธิบายไว้ข้างต้น โดยทั้งสองระบบใช้คลัตช์หลายแผ่นควบคุมด้วยระบบอิเล็กทรอนิกส์เพื่อควบคุมแรงบิด แต่ระบบ CVT กระจายแรงบิด 60:40 โดยเอนเอียงไปทางเพลาหน้า
ระบบขับเคลื่อนสี่ล้อนี้เรียกอีกอย่างว่า AWD พร้อม Active Torque Vectoring (ACT) คลัตช์แรงบิดหลายแผ่นควบคุมด้วยระบบอิเล็กทรอนิกส์ดั้งเดิมของ Subaru จะปรับการกระจายแรงบิดระหว่างล้อหน้าและล้อหลังแบบเรียลไทม์ตามสภาพการขับขี่
การใช้ระบบนี้จะช่วยเพิ่มประสิทธิภาพและความเสถียรของรถ คุณสามารถค้นหาระบบนี้ได้ในรุ่น XV Crosstrek นิว ฟอเรสเตอร์ 2014, WRX และ WRX STI 2015 ใหม่ และรุ่นเก่า เช่น Legacy 2014, Outback 2014
ระบบขับเคลื่อนสี่ล้อพร้อมเฟืองท้ายมัลติโหมด (DCCD)
นอกเหนือจากระบบขับเคลื่อนสี่ล้อที่อธิบายไว้ข้างต้นแล้ว รถยนต์ Subaru ยังใช้ตัวเลือกขับเคลื่อนสี่ล้อแบบสมมาตรอื่นๆ ที่ไม่ได้ใช้งานอีกต่อไป แต่ระบบสุดท้ายที่เราจะพูดถึงในวันนี้คือระบบที่พบใน WRX STI

ตรงด้านล่างของปุ่ม SI-Drive คือสวิตช์ที่ช่วยให้ไดรเวอร์ WRX STI เปลี่ยนความสมดุลระหว่างเฟืองท้ายตรงกลางทั้งสอง
ระบบนี้ใช้เฟืองท้ายสองตัว หนึ่งควบคุมด้วยระบบอิเล็กทรอนิกส์และมีคอมพิวเตอร์ออนบอร์ด ซูบารุก็ดีควบคุมการกระจายแรงบิดระหว่างเพลา อีกอย่างหนึ่งคืออุปกรณ์กลไกที่สามารถตอบสนองอิทธิพลภายนอกได้เร็วกว่าอุปกรณ์อิเล็กทรอนิกส์ ตามหลักการแล้ว ประโยชน์ของผู้ขับขี่คือการได้รับสิ่งที่ดีที่สุดจาก 'โลก' ที่ตอบสนองเชิงรุกทางอิเล็กทรอนิกส์และทางกลไก
โดยทั่วไปแล้ว ค่าดิฟเฟอเรนเชียลเหล่านี้ใช้ประโยชน์จากความแตกต่างโดยธรรมชาติ โดยถูกรวมเข้าด้วยกันอย่างกลมกลืนด้วยเฟืองดาวเคราะห์ แต่คนขับสามารถโน้มน้าวระบบไปยังเฟืองท้ายตรงกลางอันใดอันหนึ่งได้โดยใช้ระบบควบคุมอิเล็กทรอนิกส์ Driver Controlled Center Differential (DCCD)
การกระจายแรงบิด DCCD อยู่ที่ 41:59 โดยเอียงไปทางเพลาหลัง นี่คือระบบขับเคลื่อนสี่ล้อที่เน้นสมรรถนะสำหรับการแข่งขันกีฬาที่จริงจัง
การกระจายแรงบิดด้านข้าง
จนถึงตอนนี้ เราทราบแล้วว่า Subarus สมัยใหม่กระจายแรงบิดระหว่างเพลาหน้าและเพลาหลังอย่างไร แต่การกระจายแรงบิดระหว่างล้อ ระหว่างด้านซ้ายและด้านขวาล่ะ บนเพลาหน้าและเพลาหลัง โดยทั่วไปคุณจะพบเฟืองท้ายแบบเปิดแบบมาตรฐาน (เช่น ไม่ล็อค) แต่รุ่นที่ทรงพลังกว่า (เช่น รุ่น WRX และ Legacy 3.6R) มักจะติดตั้งเฟืองท้ายแบบลิมิเต็ดสลิป บนเพลาล้อหลังเพื่อปรับปรุงการยึดเกาะบนเพลาล้อหลังเมื่อเข้าโค้ง
WRX STI ยังมีเฟืองท้ายแบบลิมิเต็ดสลิปบนเพลาหน้าเพื่อการยึดเกาะทุกล้อสูงสุดและ WRX ใหม่ล่าสุด WRX STI รุ่นปี 2015 และ 2015 ยังใช้ระบบเวกเตอร์แรงบิดที่ใช้เบรก ซึ่งจะส่งแรงเบรกไปที่ล้อด้านในระหว่างการเลี้ยว เพื่อช่วยถ่ายโอนกำลังไปยังด้านนอกเมื่อเข้าโค้งและลดรัศมีวงเลี้ยว